一种可变飞行状态的新型布局无人机
2018-10-19杨新垒刘晓慧聂万胜
杨新垒,刘晓慧,聂万胜
(航天工程大学宇航科学与技术系,北京 101416 )
1 引 言
自20世纪70年代提出用于作战的无人机以来,各国竞相发展[1-5]。美国走在了最前面,已开发出空军和海军的无人战斗机(UCAV),波音公司已签订压制地方防空武器的无人战斗机先进技术验证计划的第一阶段,并于2000年9月展出了无人战斗演示验证机X-45A,诺格公司已与美国国防预先研究计划局(DARPA)签署了一项作战评估项目合同,继续为美军联合无人作战系统(J-UCAS)验证计划发展X-47B无人战斗机。英国将在2018—2020年服役的未来攻击航空器系统(FOAS)中考虑使用无人战斗机或有人/无人飞机混编系统。法国也在考虑将阵风战斗机改装为无人战斗机的控制机[6]。
从越南战争到海湾战争,从科索沃战争到阿富汗战争,无人机以其出色的表现预示着在作战中的重要作用和未来的不可替代性。然而,在防空兵器不断更新和争夺制空权的今天,无人机却屡屡受挫。1999年,在巴尔干半岛的“崇高铁砧行动”中,美国至少有两架无人机因飞行高度较低被高射炮或导弹摧毁[3]。在2003年伊拉克战争中,一架捕食者无人机在禁飞区上空与一架伊拉克米格-25喷气机交火后坠毁[2],说明无人机的机动性能有待提高。美国捕食者无人机巡航马赫数为0.2左右[7],X-45A巡航马赫数为0.8,X-45B的巡航马赫数为0.8,X-47B的巡航马赫数为0.75[8],由此可见常见无人机的巡航马赫数多为亚声速,其在飞行速度方面还有待提高。另外,即使某些型号的无人机速度突破声速,甚至实现了高超声速飞行(如X-43[7]),但在非设计状态下其性能大大降低,并且不能完成地面起飞,需要由B-52携带至设计高度并达到一定速度后才能释放。
从上述分析可以看出,目前的无人机存在飞行速度较低、飞行高度低、机动能力不足、非设计状态下性能大大降低等问题。针对这些问题,本文提出了一种可变飞行状态的新型布局高空无人机,取名为“先驱者”。并且进行了气动外形的设计,各部分质量的估算,动力装置的设计,对最大航程、翼载荷、起飞/降落滑跑距离等参数进行了计算,给出了先驱者的总体参数和性能参数,最后对先驱者飞行状态的设计及转换过程、飞行状态的控制和飞行方向的改变进行了详细说明。先驱者最大的创新点是设计了亚声速和超声速两种不同的飞行状态,并且可以实现两种飞行状态的转换,使其在两种状态下均具有较高的气动效率,大大提高了机动性能。
2 先驱者无人机
先驱者外形酷似一个菱形,采用翼身融合体、飞翼布局,双向三角翼设计,发动机可转向,具有亚声速和超声速两种不同的飞行状态。亚声速飞行状态如图1,超声速飞行状态如图2。

图1 亚声速飞行状态

图2 超声速飞行状态
2.1 任务剖面
先驱者先安装任务载荷,然后牵引至停机坪,以亚声速状态起飞,到达18km的巡航高度后转为超声速状态,巡航马赫数为2。飞行器到达目标区域上方,执行侦察、监视任务期间再次转变为亚声速状态,巡航马赫数为0.8。被敌发现或完成任务后迅速切换为超声速状态返回机场,到达机场上空后以亚声速状态着陆。随后,先驱者进行维护并准备下一次任务。
2.2 起飞质量
将先驱者起飞质量划分为机身、机翼、起落架、动力装置、控制系统、燃油及载荷七部分,对各部分质量进行了估算,如表1所示。
机身、机翼、起落架、燃油质量分别利用经验公式计算得到,可参考文献[10]。其中由于先驱者拥有亚声速和超声速两种机翼,故机翼的最终质量取为计算值的1.5倍。
如机身质量计算公式为

式中:LF为机身全长,DF为机身等效半径,VD为设计期望速度。
动力装置、控制系统、载荷通过调研现有无人机进行确定。动力装置包括三台中等推力的涡扇发动机,两台用于提供推力,一台用于驱动升力风扇,参考国产ARJ-21支线运输机的发动机——美国通用公司的CF-34-10A,其改型发动机可以提供41.85kN推力,质量仅760kg。控制系统质量设计为500kg。载荷分为侦察用有效载荷和打击用任务载荷,先驱者侦察用有效载荷设计为红外传感器、数字电视/照相机、合成孔径雷达等,打击用任务载荷设计为8~10枚LS-6/50微型50kg级制导炸弹或BA-7激光半主动制导空地导弹,也可携带2~3枚FT-3这一类250kg级别的制导炸弹[11,12]。

表1 先驱者起飞质量
2.3 主要参数
利用Catia建立了先驱者的三维几何模型,三视图如图3所示。主要设计参数如下:
亚声速状态下,机长11.5m,翼展25m,机高3.65m,后掠角22.4o,展弦比5.192,翼型的相对厚度设计为0.08,巡航马赫数0.8。超声速状态下,机长25m,翼展11.5m,机高3.65m,后掠角67.56o,展弦比1.099,翼型的相对厚度设计为0.03,巡航马赫数2.0,巡航高度18km。
运用文献[10]中的经验公式对最大航程、起飞/降落地面滑跑距离、翼载荷等参数进行了计算。得先驱者的最大航程为4200km,起飞地面滑跑距离为420m,降落地面滑跑距离为530m,翼载荷为349.72kg/m2。
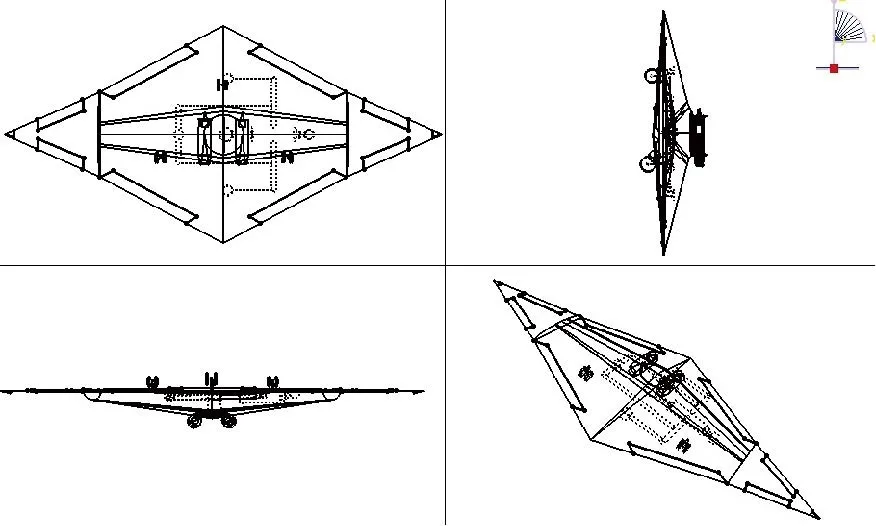
图3 先驱者三视图
3 动力装置的选择及安装
先驱者[13]的动力装置包括发动机和一套升力系统,下面主要介绍发动机的设计选择过程和安装位置,以及升力风扇的设计方案和主要参数。
3.1 发动机的设计及安装
先驱者采用了关于纵轴与横轴对称的翼身融合体造型,为了保证在亚声速状态和超声速状态下均能提供动力,且不产生偏航力矩,发动机安装在了对称中心处,如图1和图2所示。两台发动机安装在一个可旋转的转台上,转台由液压伺服机构驱动,可实现转向,如图4所示。

图4 发动机安装局部放大图
当先驱者在18km高度进行超声速巡航时,使用ANSYS软件对先驱者三维模型进行数值仿真,来流马赫数设为2,攻角设为4o。得到此时的阻力为78.4kN,飞机在小攻角飞行时,近似认为推力与阻力相等,故每台发动机需提供推力39.2kN。美国通用公司的CF-34-10A改型发动机每台可提供41.85kN推力,因此其能够满足动力需求,也说明了参考其进行质量设计是合理的。
3.2 升力系统的设计及安装
为了弥补先驱者飞行状态转换时升力的不足和增加飞行器稳定性,设计了独特的升力系统。
升力系统由升力风扇和稳定性控制喷管共同组成,如图5所示。图中①-④为四个稳定性控制喷管,中间为升力风扇,由涡轮发动机通过涡轮轴驱动,灰色直线表示连接管路或传动轴,升力系统产生向上的推力。
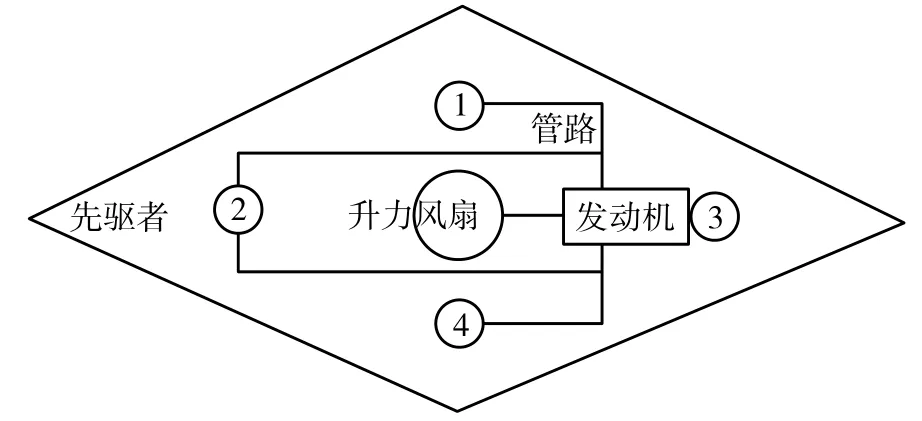
图5 升力系统管路图
升力风扇安装在发动机转台(转台直径2m)中间,直径设计为1.5m,高度设计为1.6m。在升力风扇不使用时,升力风扇舱盖关闭,使得其有良好的外形,不会影响先驱者的气动性能;当升力风扇使用时,舱盖打开,升力风扇启动,如图6所示。
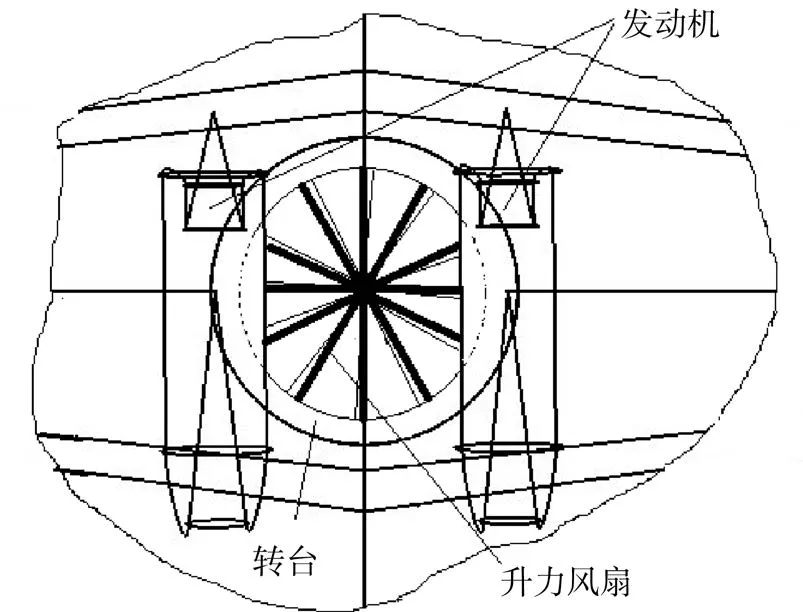
图6 升力风扇安装局部放大
先驱者超声速和亚声速机翼翼根处安装四个稳定性控制喷管,通过管路从发动机引出高压燃气,向下喷气,产生推力。燃气流量可通过电气阀控制,有利于实现先驱者的平衡。
参考文献[14],先驱者的升力风扇可产生推力设计为80kN,翼根处每个稳定性控制喷管推力设计为20kN,故总推力为160kN。而先驱者最大起飞质量为15436kg,因此设计的升力系统能够满足所需。
4 飞行状态的设计及转换过程
介绍了先驱者两种不同的飞行状态,详细描述了飞行状态转换过程,提出了两种需要变向的情景。分析表明,两种飞行状态的设计大大增强了先驱者的机动性,从而提高了无人机的生存性能和作战能力。
4.1 飞行状态的设计
先驱者进行超声速飞行时的状态如图2所示,机翼如图7所示。超声速飞行状态下,先驱者可以实现前后两个方向的飞行,此时,机翼前缘的副翼锁死,后缘的两个副翼发挥作用,反方向飞行时,前缘副翼打开,后缘副翼锁死。
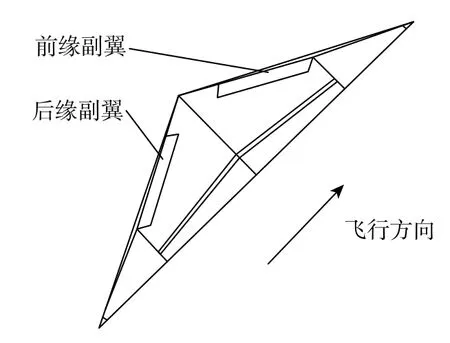
图7 超声速机翼
先驱者在超声速状态下有着较小的展弦比及较大的后掠角,有利于提高超声速状态下的性能;超声速飞行时需要较薄的翼型,而先驱者的翼型的相对厚度为3%,并且这个比例沿着展长方向保持恒定,这与超声速飞行的要求一致;超声速翼型有着尖锐的前缘,在超声速状态下可以有效减少脱体激波的产生,与传统的一些超声速翼型相比,激波阻力将极大减小;此外,翼型上表面设计为关于弦长中点对称的圆弧,可实现前后两个方向的飞行;扁平的翼型下表面,可降低向下的激波传播以及音爆。
相对于超声速飞行状态,亚声速飞行状态下发动机旋转了90o,飞行状态如图1所示。先驱者在亚声速状态下,同样可实现前后两个方向的飞行。以图8所示方向为例,此时机翼前缘的副翼锁死,机翼后缘的两个副翼发挥作用。
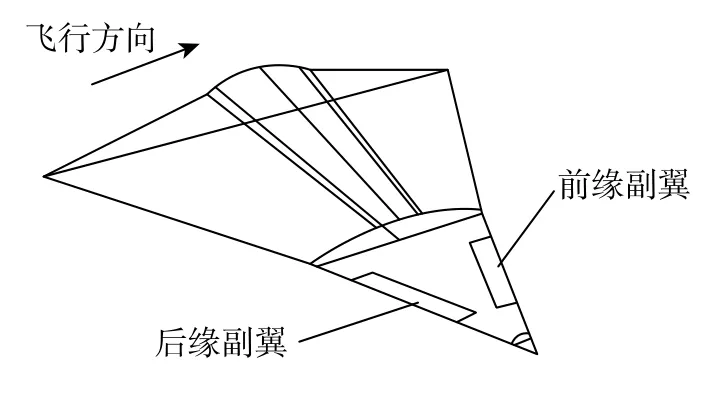
图8 亚声速机翼
亚声速状态下先驱者有着较大的展弦比及较小的后掠角,翼型的相对厚度设计为0.08,沿着翼展方向保持恒定,这些设计使得先驱者在低速时能够产生相对大的升力,有利于飞机的起飞/降落。翼型扁平的下表面和关于弦长中点对称的圆弧上表面,有利于实现亚声速状态下的双向飞行。
亚声速机翼尖锐的前缘使得先驱者在起飞降落时容易失速。为了增加失速裕度,在亚声速机翼前缘安装了空气射流装置,装置原理如图9所示。通过在机翼前缘提供一个点源流(点源流气体由压气机提供)与均匀的空气来流叠加,最终获得一个钝角的绕前缘流动,来提高有效前缘半径,从而提高失速攻角和升力特性。此外,通过改变压气机的压力大小,可改变点源流流动的强度,控制有效前缘半径,实现不同的气动特性。

图9 空气射流装置示意图
4.2 飞行状态的控制
当先驱者以亚声速或超声速飞行时,通过副翼控制实现俯仰、滚转和偏航。先驱者具有八个副翼,其中四个用于超声速状态的控制,另外四个用于亚声速状态的控制。在不同状态下,相应状态的副翼将被激活工作,与此同时另一状态的副翼将被锁定而不发挥作用。
先驱者的副翼与传统的副翼不同,每个副翼由上下两部分组成,并且可以独立地进行向上或向下偏转,以补偿缺少垂直安定面带来的影响,以亚声速状态副翼为例进行介绍,如图10所示,实线部分表示副翼上半部分,虚线表示副翼下半部分,二者可以独立进行操纵。
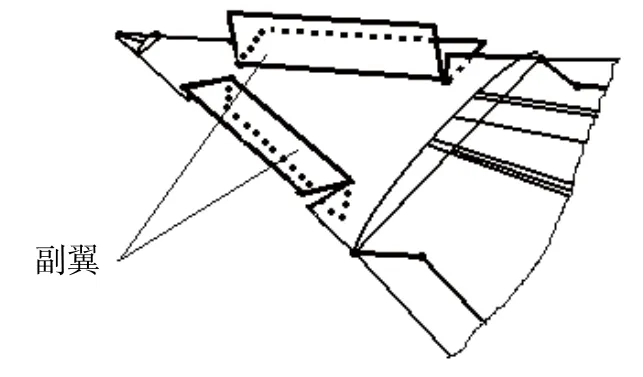
图10 副翼结构图
在俯仰控制中,当需飞机抬头时,副翼的上半部分将被使用,同时下半部分将维持锁定状态。当需飞机低头时,仅使用副翼下部分,上部分将被锁定而不工作。
在滚转控制中,从飞机尾部观察,逆时针滚转时,左侧副翼的上部分和右侧副翼的下部分工作,而左侧副翼的下部分和右侧副翼的上部分将被锁定而不工作。顺时针滚转时,左侧副翼的下部分和右侧副翼的上部分工作,而左侧副翼的上部分和右侧副翼的下部分将被锁定而不工作。
在偏航控制中,当需飞机逆时针偏航时,仅左侧副翼起作用,此时左侧副翼的上下部分都将被激活工作,而右侧副翼将被锁定不工作;当需飞机顺时针偏航时,与上述相反。
4.3 飞行状态的转换
以亚声速状态转换为超声速状态为例说明先驱者如何实现亚声速飞行状态和超声速飞行状态的相互转换。
转换过程主要分为三步,第一步启动升力系统,第二步实现发动机转向,第三步实现飞行方向调整,具体操作流程及分析如下:
(1)先驱者减速,启动升力系统。打开升力风扇舱盖,启动升力系统,同时减小发动机油门。发动机推力减小,在阻力的作用下,先驱者飞行速度减小,受到的空气升力减小。飞控系统调节升力风扇的功率,使先驱者垂直方向上受力平衡。
(2)实现发动机转向。发动机的推力不断减小,直至处于待机状态,发动机在电气阀控制伺服机构的驱动下旋转90o,使先驱者转变为超声速状态。
(3)逐渐增大油门,调整飞行方向。发动机推力增大,飞行速度增大,大气升力不断加大,飞控系统调节升力系统的功率不断减小直至关机。先驱者逐渐加速突破音障,最终加速至Ma=2的超声速巡航状态,在此过程中调整飞行方向至原飞行方向。
4.4 飞行方向的改变
未来的空中对抗将朝着高速化、智能化发展,传统的喷气式飞机需要通过转弯逐渐实现飞行方向的转变,这将极大地影响其生存能力和作战效率。先驱者独特的外形设计使得其具有更直接、更快速的机动方式——四个方向(90o变向和180o变向)的直接变向,而这样非常规的突然变向往往也让敌方雷达难以预测和捕捉。作为新型无人机,这样的功能极大的增强了先驱者的生存能力和作战能力。
4.4.1 空中变向
空中变向的方法同飞行状态转换基本相同,但只需完成飞行状态转换的前两步。假想先驱者以亚声速执行侦查任务,进入敌防御区后被发现,飞行器需要选择最短的路线,并且以最快的速度逃离敌防御区。此时先驱者选择空中变向(90°变向),这样逃离距离最短,同时飞行状态由亚声速转换成了超声速,飞行速度最快,如图11所示。这样的设计符合战场实际需求。

图11 空中变向示意图
4.4.2 空中倒车
当先驱者以亚声速或者超声速飞行状态进入敌防御区被发现后,先驱者在飞控系统的作用下,启动升力风扇,发动机迅速调整到待机状态后旋转180o再次启动,促使先驱者速度迅速降低后反向加速,实现空中倒车,从而迅速逃离敌防御区,如图12所示。
5 结束语
先驱者作为一款先进的未来高空无人机,相比于现有无人机,在气动外形、动力装置、飞行状态以及状态控制与稳定性方面均有所创新。

图12 空中倒车示意图
(1)气动外形的设计。翼身融合体外形加之无垂尾的飞翼布局,可减少由于翼身干扰带来的阻力和提高隐身性能。双向三角翼的设计使得先驱者具有中心对称的外形,以实现飞行状态和飞行方向的改变。
(2)动力装置的设计。先驱者发动机安装在一个可旋转平台上,实现了发动机的转向。独特的升力系统,既可减小起飞/降落滑跑距离,又可在特殊情况下实现垂直起降,还能在飞行状态转变时提供向上的推力。
(3)不同飞行状态的设计。在亚声速和超声速飞行环境下分别采用不同的飞行状态:当先驱者起飞/降落或对地侦察时以亚声速状态飞行,当需要快速到达或快速机动时以超声速状态飞行,两种飞行状态之间可实现转换。可实现空中变向、空中倒车,大大增强了无人机的机动性能。
(4)状态控制与稳定性。副翼独特的设计和稳定性控制喷管的设计有利于先驱者实现状态控制和获得良好稳定性。
