基于加权拉格朗日二次插值的直线电机误差补偿方法
2018-10-16袁清珂
王 征,袁清珂 ,萧 显,肖 聪
(广东工业大学 机电工程学院,广东 广州 510006)
0 引言
近年来,随着高速切削、精密加工等先进技术的发展,精密制造加工行业开始推行高精度、快速响应的定位装置[1]。直线电机作为一种典型的单轴传动定位机构,具有结构简单,无接触运行,噪声低,速度和精确度高等优点[2,3]。直线电机通常是在PMAC条件下,采用带物理反馈的闭环控制方式进行加工定位,虽然目前的控制技术已经较为成熟,但是在实际的应用中,并不能完全消除非控制层面的影响。文献[4]在低速运动条件下,研究了滑台摩擦力对直线电机定位精度的影响,改进了补偿控制器,降低了跟踪误差;文献[5]提出了带前馈的PID混合控制方法,并进行了振动误差的补偿实验,为后续的研究提供了一定的技术支持;文献[6,7]从直线电机驱动工作台出发,分别对电机发热和摩擦热进行了特性分析,为热量对机台精度影响的研究提供一定的指导意义,但并未涉及如何消除该特性误差方面;文献[8]提出了采用误差补偿表进行补偿,但本质是采用离散的补偿模型,不能保证工作行程内的点位都具有可靠的定位精度。
本文从影响直线电机定位精度的因素出发,对电机控制方法进行分析和改进,并提出加权拉格朗日二次插值的补偿方法,经过实验分析证明了该方法的可行性,能够补偿外界物理因素造成的定位误差。
1 直线电机定位精度影响因素分析
直线电机通常采用带反馈的闭环控制方式,可以通过反馈装置对动子的位置进行精确调整,但是在实际使用中可能存在光栅尺的装配误差、设备老化、机台振动和高温形变等影响因素,在诸多因素的综合作用下会累积较大的随机误差。
激光干涉仪是能够测量线性定位精度的设备,可精确到0.1μm,并且可以通过外部传感器近似补偿环境温度、材料表面温度、湿度和振动造成的误差。图1为激光干涉仪测量电机定位精度的对比曲线,其中直线电机有效测量行程为0mm~500mm,测量间隔为10mm,单点停顿时间为 5s,环境温度为 24°C。
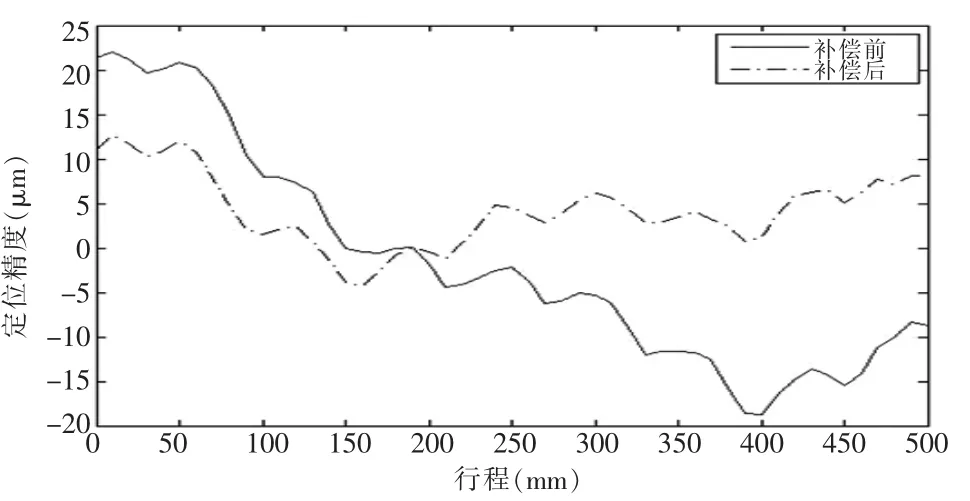
图1 补偿前后定位精度对比图Fig.1 Comparison of positioning accuracy before and after compensation
由图1可以看出,未开启激光干涉仪补偿功能时,所检测的定位精度在±22μm以内,开启补偿后,定位精度在±13μm以内。该数据表明在直线导轨摩擦生热、电机自身产热、机台振动等因素的综合影响下,产生了较大的定位误差,精密加工设备通常要求定位精度在±6μm之内,因此目前的情况不能满足实际需求。
2 前馈-PID混合控制方法
针对多因素综合影响问题,选择采用前馈和PID混合控制的方法,根据干扰的作用量进行补偿。被控变量所产生误差是由干扰引起的,而干扰是诸多影响因素的综合作用结果,若每个主要因素都设置一个前馈通道,将会大大增加使用和维护的成本,因此本文提出将干扰进行综合和参数化处理,设置单个通道进行控制。
图2为前馈-PID混合控制的系统框图,该系统主要由基于插值法的前馈控制器、PID控制器、D/A和A/D转换器、驱动器、直线电机以及光栅尺等组成。

图2 前馈-PID混合控制的系统框图Fig.2 Feed-forward PID hybrid control system block diagram
当工控机输出移动指令时,将计算所得的理论位置坐标输出给前馈控制器,前馈控制器通过内部运算输出该点的补偿控制信号,进行定位精度的“粗调”,用以补偿外界物理干扰;另一方面,信号通过PID控制器处理,伺服驱动器发出脉冲信号控制直线电机的动作,同时通过光栅尺的反馈作用补偿机械误差。
3 加权拉格朗日二次插值数学模型
拉格朗日二次插值方法即在被插函数曲线上任取相邻三个点作为插值节点,以这三个点作一条二次曲线来近似地表示原曲线。
加权拉格朗日插值多项式可以表示为[9]:

其中 lk(x)为拉格朗日插值基函数,WL(x),WR(x)为加权因子:
在任意相邻两节点间作插值,考虑到插值点左右两侧的插值节点不同,曲线的趋势也不同,所以分别以左右两侧的插值节点作两条不同的曲线,然后通过加权的方法将两条曲线融合成一条插值曲线,从而获取更加精准的定位信息。
例如在 x1,x2之间插入一点 xi, 则选取 x0,x1,x2和 x1,x2,x3分别构造一条插值曲线:

4 误差补偿余项分析
设函数 y=f(x)在区间[a,b]上有定义,并且存在 n+1个插值节点 xi(i=0,1,2…,n)。假设 f(x)在[a,b]上存在 n+1阶导数,使用n阶插值多项式pn对函数f(x)进行插值,则对于任一个 x∈[a,b]有:

其中:

选取均匀分布的插值节点,对任意的M>0均有maxx∈(a,b)|f(n+1)(x)|≤M,进而可得:

选取 n=2,即在 xi-1,xi,xi+1三点之间进行二次插值,插值点为 x∈(xi,xi+1),则插值函数为:

此处设定直线电机的行程为540mm,为了降低系统的复杂程度,提高方法的通用性,以10mm为采样间距,在全量程采集55个定位点坐标作为补偿样本,设xi+1/2为xi,xi+1的中点,可以得出:

其中Ri+1/2为误差补偿余项,

在插值过程中,考虑到转折点的情况,因此需要对余项进行分析,定义在xi+1/2左右两侧的余项:

插值点xi的插值多项式为:

式中:

考虑到直线电机运动测试中,采样点个数足够多,且任意相邻两点之间的变化不大,因此通过对比(14)(18)式可以得到:

综上所述,在直线电机工作行程内的加权拉格朗日二次插值补偿公式为:
在数据点出现转折和波动的情况时,g(RL,RR)可以确定误差补偿的方向[10],若RL,RR异号,证明在插值子区间内存在转折点的情况,若RL,RR同号,选取较小的值作为误差补偿参数,从而更加可靠地对直线电机的定位误差进行补偿,并且该方法具有自适应性。
5 实验分析
误差补偿实验平台如图3所示。实验平台主要包括减振大理石基座,直线电机模组,传送平台,运动控制卡及控制电路,工控机,激光干涉仪及其补偿传感器等。
设置直线电机的实验行程为540mm,动子运动速度为100mm/s,环境温度为24℃,在此条件下设计三组实验记录位置坐标和定位精度等数据,获取补偿效果评价图像。

图3 误差补偿实验平台Fig.3 Error compensation experiment platform
在直线电机未开启补偿功能时,需要先获取若干参考点处的定位精度。本次实验选择了55个点位作为补偿的样本信息。将该样本信息接入补偿模块后开启使能,使用激光干涉仪测量该55个节点位置的定位精度,由图4(a)可以看出补偿后所有插值节点的定位误差均在±1μm以内,具有很好的精确度。
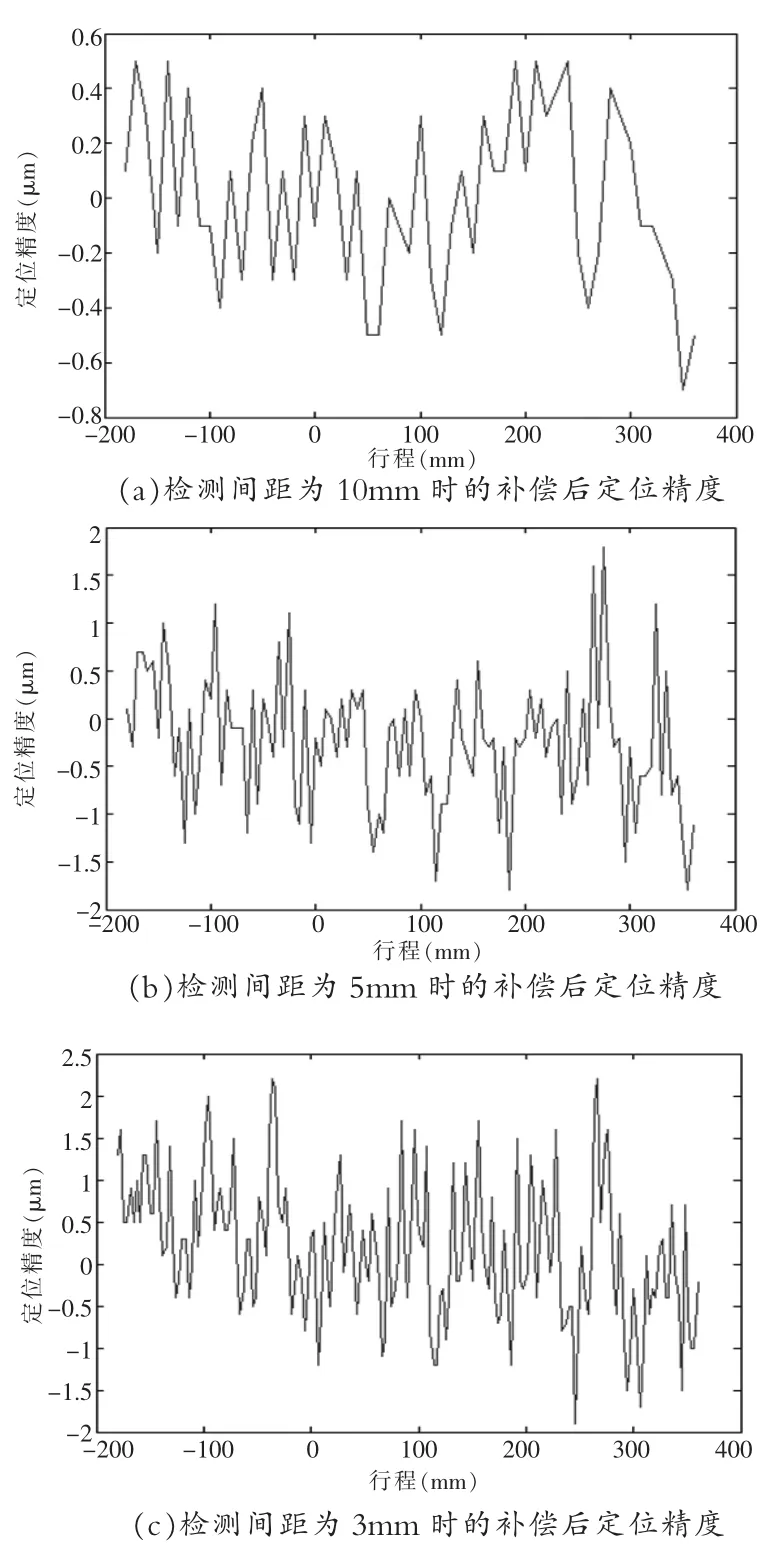
图4 补偿后定位精度图Fig.4 Positioning accuracy after compensation
为了检验全程补偿效果,将检测点细化,图4(b)是间距为5mm时检测109个定位点的定位精度曲线,由图像可以看出通过该方法所补偿的全部点位基本稳定在±2μm范围内,图4(c)是间距为3mm时检测181个点位的定位精度曲线,在此条件下规避了所有的对点补偿和插值补偿点位,由图像可以看出整体定位精度稳定在±2μm范围内,由于系统的随机误差产生了个别异常波动的情况,但是波动的峰值仍然在±2.5μm范围内。因此通过该补偿方法能够消除绝大多数的定位误差,对于随机误差的影响效果也可以控制在理想范围之内。
6 结论
在目前的研究水平基础上,本文基于插值法对直线电机定位误差的补偿方法进行研究,提出了采用加权拉格朗日二次插值的方法提高误差补偿的精确度和可靠性,通过实验验证,证明了该方法的可行性。在此前提下,从影响直线电机定位精度的主要因素出发进行分析,改进了前馈控制器的控制方式,使控制器输出的信息能够有效补偿电机因外部环境导致的定位误差,配合反馈实现更精确的定位。
