压力传感器动态校准系统的不确定度分析*
2018-10-11张志杰张润哲
马 泽, 张志杰, 张润哲
(1. 中北大学 仪器与电子学院, 山西 太原 030051; 2. 中北大学 仪器科学与动态测试教育部重点实验室, 山西 太原 030051; 3. 山西北方机械制造有限责任公司, 山西 太原 030009)
0 引 言
随着科技水平的发展, 在许多方面都非常依赖于各种类型的压力传感器. 而在很多工程实现的过程中, 会遇到很多压力是动态变化的情况, 为了能够测量诸如此类的瞬态变化的压力值, 就要求对压力传感器的瞬态信号响应较好. 所以对压力传感器的动态校准是至关重要的, 以此可以确定压力传感器的频率响应函数、 阻尼比、 固有频率等参数[1].
在动态测试过程中, 不可避免地有误差的存在. 有校准系统工作带宽不足带来的误差, 也有受到激波二次冲击、 温度变化、 噪声等影响导致的校准结果较大的不确定度差异. 因此, 对压力传感器的动态特性参数进行不确定度评定, 即可以衡量压力传感器的动态性能, 还可以对其进行溯源, 具有十分重要的发展前景[2-3].
1 压力传感器动态校准系统原理
图 1 为压力传感器动态校准系统的原理框图. 主要包括3个部分: 压力产生部分, 数据采集与处理部分及上位机部分. 其中压力产生部分由激波管、 气源及控制台构成, 采集和处理部分由压力传感器、 被测压力传感器以及测速模块、 FPGA等构成.
压力传感器A1,A2安装在侧壁上, 用于检测激波传播的速度,A3作为触发传感器, 用于触发信号采集, 另外一只被校准的压力传感器安装在激波管的端面. 激波通过测速传感器, 可得到激波的速度值Ms. 根据激波管理论, 可以求出激波通过侧面的输入激波阶跃压力Δp2和底部端面的反射激波阶跃压力Δp5[4].
(1)

(2)
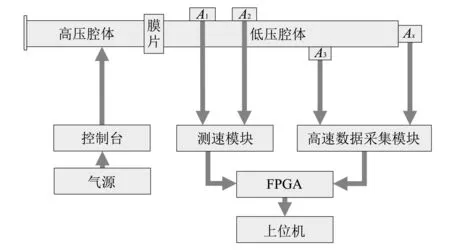
图 1 压力传感器动态校准系统原理框图Fig.1 The diagram of dynamic calibration system for pressure sensor
2 基于GUM法的不确定度分析
《测量不确定度评估指南》中GUM法评定步骤为: ① 明确被测量参数的定义; ②确定测量方法、 条件、 标准以及系统;③ 被测量的数学模型; ④ 分析被测量结果不确定度的来源; ⑤ 确定各个输入量的标准不确定度; ⑥ 合成标准不确定度[5-7].
2.1 基于GUM法的不确定度模型
本次分析不确定度采用的GUM法不确定度模型为
(3)
式中:A类不确定度uA是根据统计学原理, 采用多次测量求标准差的方法求算的,B类的不确定度uB是根据使用手册或历史资料提供的数据对被测量量的概率分布进行估计的.
2.2 不确定度合成计算
在实际测量系统的不确定度时, 被测量值不能被直接获取, 需要由其他影响本测量值的外部因素(可被直接测量获取的数据信息、 或直接通过测量手册和标准文件获取的数据信息), 通过一定的数学关系求出, 如
(4)

在任意影响因素之间相关系数为0时, 协方差为0, 式(4)为
(5)
2.3 基于激波管的动态压力校准系统的不确定度分析
激波管动态校准系统不确定度的主要影响因素即为阶跃信号的压力值, 在本系统中将被校准传感器安装在低压室的底部端面, 其反射阶跃压力
(6)
式中:P1为初始压力值;Ma为入射的激波马赫数, 公式为
(7)
式中:vs为激波的速度值;C0为空气中的音速;T为激波管内的温度;L为两测速用压力传感器之间的距离;t为激波经过两测速用压力传感器之间的时间.
由式(7)可知, 阶跃压力值P的不确定度由激波的速度值vs, 激波管内的温度T, 激波经过两测速用传感器的时间以及初始压力值P14个分量共同决定, 除此之外还有测量重复性的影响, 根据不确定度的传递模型, 传递公式为
(8)
各个分量对应的灵敏系数分别为
(9)

(10)

(11)

(12)
假设管内气体为理想气体, 初始压力值P1为0.089 MPa, 激波管内温度T为20.1 ℃, 声速C0为332 m/s, 两测速用压力传感器之间的距离L为0.55 m, 通过两测速用传感器的时间为932 μs, 根据式(7)可计算出激波管马赫数Ma=1.716.
两测速用压力传感器间距测量引入的不确定度分量uL的主要因素为结构体的安装、 传感器配置的公差和测量仪器的精度. 测距仪器的极限误差为10-4m, 可以看做为均匀分布, 可得
(13)
激波经过两测速用传感器的时间测量引入的不确定度分量ut的主要因素为A/D的采样速率fs,ut=1/fs. 本系统用高速A/D采集, 采样频率60 MHz, 不确定度为16.7 ns.
温度测量引入的不确定度分量uT的主要因素为温度记录仪的精度, 目前测量精度为0.01 ℃, 不确定度为0.01 ℃.
激波管内低压室初始压力值P1引入的不确定度分量UP1的主要因素为压力测量仪的精度, 目前测量精度为MPa, 并且满足均匀分布, 可得
(14)

根据以上不确定度分量, 对不确定度进行分析, 可得表 1 中数据.

表 1 不确定度分析数据
3 基于MCM法对GUM法测量不确定度评定的验证
MCM法是通过大样本的方法对所建立的概率模型进行求解, 分析过后得出系统的不确定度. 有以下两种系统情况[8-9].
3.1 针对已知误差传递函数的系统
针对一直误差传递函数的系统, 其间接测量模型为
Y=f(X1,X2,…,Xi,…,Xn).
(15)
各个影响不确定度为ui(i=1,…,n), 对应的随机误差为
ΔXij, (i=1,…,n;j=1,…,m).
(16)
被测量值的随机误差为
(17)
在此种情况下, MCM法与GUM法可以达到良好的统一, 两者的不确定度评定结果比较接近. 但是MCM的数学模型以及数学推导、 实验重复次数极大地增加了测量过重和结算的复杂程度, 所以GUM法更为适用.
3.2 针对未知误差传递函数的系统
由于误差未知, 所以很难采用GUM法进行不确定度的有效评定, 对此种情况MCM法较为适用.
针对本设计中的压力传感器动态校准系统, 选取了3种量程分别进行了20次的动态校准, 经过数据处理, 获取了实验数据. 对峰值压力、 稳态压力以及反射压力分别求取概率度函数, 得出结果如图 2 所示.
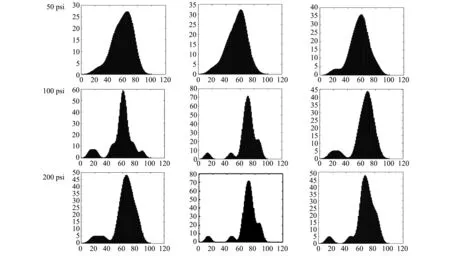
图 2 峰值压力、 稳态压力以及反射压力的概率密度图Fig.2 Probability density graph of Peak pressure, steady state pressure, and reflection pressure
确定容值差δ, 根据输出值的标准不确定度有效数据位和指数幂, 分别用MCM法和GUM法计算得出结果如表 2 所示.

表 2 MCM法与GUM法结果对比
评价标准为
dlow=|ue-uGUM-uMCM|,dhigh=|ue+uGUM-uMCM| (dlow≤δ,dhigh≤δ).
(18)
从表 2 中可以明显看出3种量程的结果均未通过验证, 故GUM法失效.
4 结束语
本文主要对设计的压力传感器动态校准系统进行不确定度分析, 基于MCM法对GUM法测量不确定度评定进行了验证; 论述了基于GUM及蒙特卡罗方法的不确定度分析理论; 对压力传感器动态校准系统不确定度进行了MCM法评定; 对MCM法和GUM法的不确定度分析结果进行比对可以明显看出3种量程的结果均未通过验证, 故GUM法失效, 不适用于压力测试系统动态误差不确定度的评定.
声明
本刊已许可中国学术期刊(光盘版)电子杂志社、 万方数据知识服务平台、 超量网等多家单位在其网站及其系列数据库产品中, 以数字化方式复制、 汇编、 发行、 信息网络传播本刊全文。 该社著作权使用费与本刊稿酬一并支付。 作者向本刊提交文章发表的行为即视为同意我编辑部上述声明。