消防无人机集群在消防灭火中的应用研究
2018-10-11梁晓龙刘流空军工程大学空管领航学院
■ 梁晓龙 刘流 空军工程大学空管领航学院
■ 黄中杰 公安消防部队高等专科学校训练部
■ 潘峰 黄科力 西南交通大学希望学院信息工程系
当前,我国消防部队面临的消防灭火形势越来越严峻,尤其是随着城市建设的日益发展,高层建筑越来越多,处理火情的难度也日益加大,给消防带来了极大的不便。现有灭火技术通常为通过消防云梯及消防水枪进行灭火,然而受自身条件的限制,有时灭火效果不甚理想。随着无人机技术的发展,现已有将无人机运用于消防灭火的实践,在指挥中心的统一指挥控制下,通过无人机对火源进行侦察,指挥中心根据火情信息,给灭火无人机发出灭火指令,进行消防灭火。
目前仅有部分经济发达地区的省总队或支队级购置了消防无人机,并且抽选了专业人员力量组建无人机分队,大多是采取人工遥控操作灭火的方式,自动化程度不高,现场智能性不足。由于无人机之间缺乏信息交互,融合程度低,灭火效率较为低下,没有发挥出无人机消防更大的优势。本文所提出的消防无人机集群系统能够有效弥补消防无人机单平台功能不全,人工操控成本高、操作流程复杂等缺点。
一、无人机集群
1.无人机简介
无人机即无人驾驶飞机,最初主要应用于军事领域。后来无人机因其特有的优势逐渐应用于民用领域。近年来,由于自然灾害频发,无人机在我国得到了进一步发展。无人机主要由飞机机体、飞控系统、数据链系统、电源系统和动力系统等部分组成。无人机的功能及特点主要有:(1)快速机动,响应及时。无人机具备机动灵活的特点,一旦任务需要其可快速到达指定目标区域,且对现场环境要求低。(2)成本低廉,危险性小。无人机运行成本比较低,保养和维修也比较简便;其体形小,不用租赁起飞和停放的专用场地;无人机可以飞行到危险地域,或在不良气候条件下执行紧急飞行任务。
2.无人机集群
自然界中存在许多聚集而成的生物群体,如逃避天敌的鱼群、迁徙的鸟群等,如图1所示。此类群体的特点是单个个体的能力及智力水平有限,但个体间通过一定的交互而聚集成群体后,则能够克服单一个体能力上的不足,在整体上“涌现”出特定的功能,人们将这种现象称为集群智能。受生物集群的启发,本文提出消防无人机集群系统及集群内自主协同机制,并将集群进行分子群设计,使得消防无人机集群能够以自主协同、智能化的方式完成特定消防灭火任务。

图1 自然界中典型生物集群
二、消防无人机集群在消防灭火中的应用
1.消防无人机集群系统组成及架构
本文利用分群设计的思想,将消防无人机集群系统分为侦察无人机子群、灭火无人机子群以及特种救援无人机子群。通过将集群进行分群设计,从而降低单一平台的复杂性及成本,体现出集群的智能性和功能涌现性。
消防无人机集群系统由多旋翼无人机平台、地面站系统、电源供应系统、任务载荷、消防云系统等组成,如图2所示。地面站是消防无人机集群系统的指挥控制中心,其功能包括无人机的任务规划、飞行参数监视、任务载荷的状态显示以及无人机的起飞和降落控制等。任务载荷包括灭火弹、瞄准具、投掷装置及各类传感器等,是灭火任务的主要执行机构。消防云系统为云端计算、存储、处理系统,通过系统执行消防灭火任务,不断收集任务相关数据,从中提取系统任务执行规则,从而促使系统执行层的不断进化,功能不断丰富和完善,使得系统能够真正向智能化的方向不断发展。
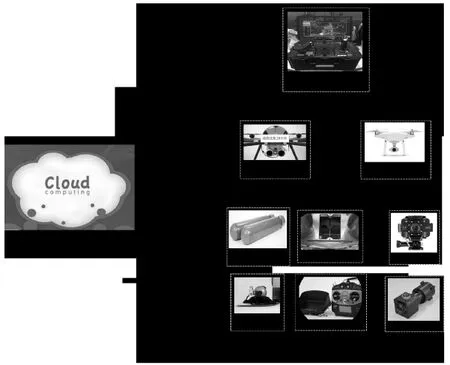
图2 系统组成示意图
2.自主协同决策机制
(1)自组织避撞机制
消防无人机集群在执行相应任务时可采用自组织网络避撞算法解决多机协同避撞问题。首先无人机在执行任务过程中能够实时检测自身是否安全,当遇到危险或可能发生相撞时,需要通过形成自组织网络,感知周围无人机状态,若检测到相撞风险时,则无人机相互排斥,类似同性电荷相互排斥作用;若无相撞风险,则按照预定路线继续运动。
(2)火源协同搜索机制
在接收到火灾报警后,往往只能了解火源大致位置信息,此时需要出动侦察无人机子群判明火源精确位置及周边情况,为下一步决策提供依据。集群系统可采用全覆盖协同搜索策略,如图3所示。首先确定火源存在的区域范围,将区域顶点坐标发送至侦察无人机子群首,随后子群首确定需要出动侦察无人机数量,并为每架无人机规划搜索路径,展开火源搜索,确定火源位置。
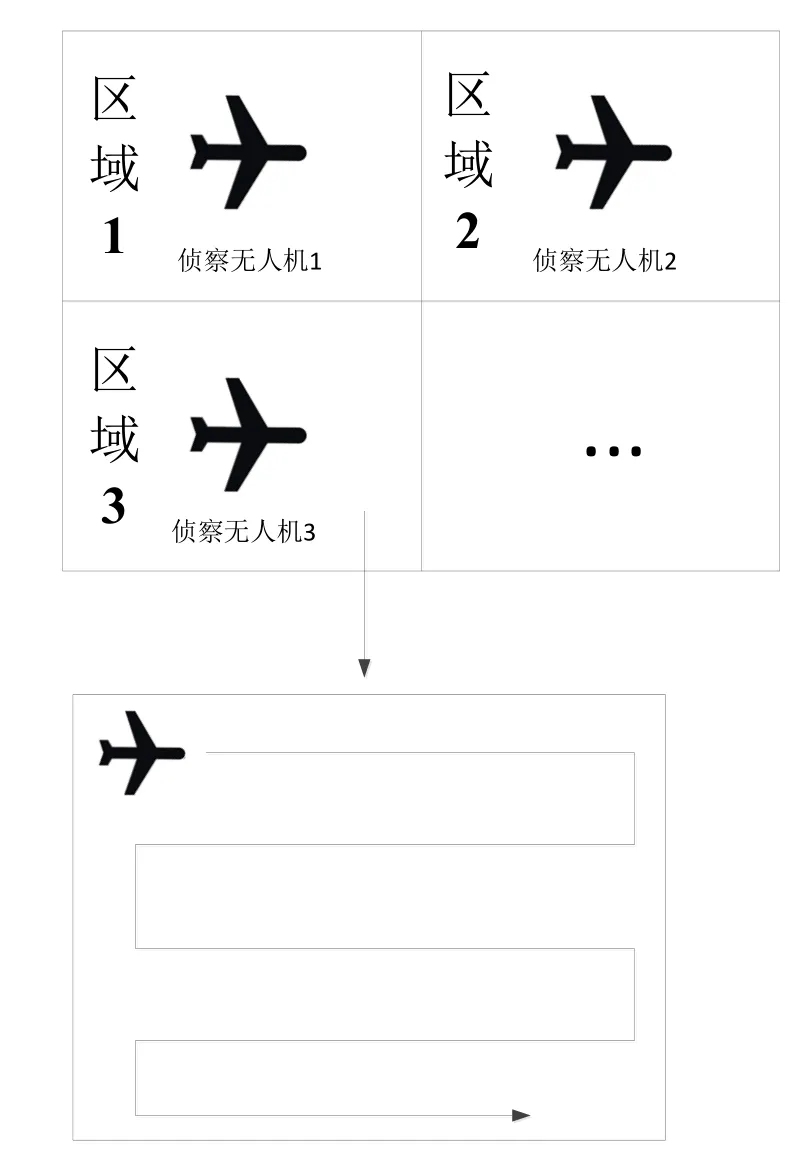
图3 全覆盖搜索策略示意图
(3)协同定位机制
消防无人机集群系统在发现火源后对火源进行协同定位,从而确定其准确位置。协同定位方法采用AOA(Angle-of-arrival)定位方法,即到达角度测距方法。
AOA是基于信号到达角度的定位算法,是一种典型的基于测距的定位算法,通过某些硬件设备感知发射节点信号的到达方向,计算接收节点和锚节点之间的相对方位或角度,然后再利用三角测量法或其他方式计算出未知节点的位置。基于信号到达角度(AOA)的定位算法是一种常见的无线传感网络节点自定位算法,算法通信开销低,定位精度较高。示意图如图4所示。
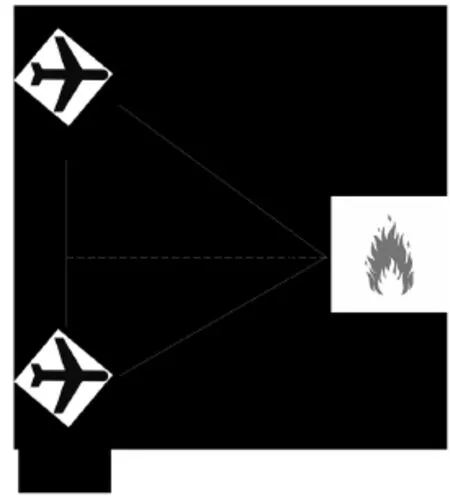
图4 协同定位示意图
(4)协同投弹灭火机制
侦察无人机子群完成对火源的定位以及火势判断后,将相关信息发送至灭火无人机子群首,子群首根据火势决策出动灭火无人机数量。子群首为每架灭火无人机配备飞行高度层,灭火无人机按照自身高度层飞往火源上空,按照高度由低到高的顺序依次投弹并返航。
3.消防无人机集群基本工作流程
当前,城市消防站(队)布局一般以接到出动指令后5分钟内可到达责任区边缘为原则,普通消防站辖区面积不应大于7平方公里,近郊区消防站辖区面积不大于15平方公里。现以某小区内以车辆燃烧发生火灾为例,进行火灾报警。
(1)接警后,就近消防站迅速出动消防车辆并携带消防无人机集群,在车辆行进过程中,完成1-3架侦察无人机的路径规划与放飞工作,侦察无人机迅速飞往火灾地点。
(2)侦察无人机到达火灾现场后,将获取的火场图像信息以及火场的精确定位信息传至地面站,地面站根据红外图像信息确定火势大小及火场面积,从而确定需要出动灭火无人机规模数量。
(3)通过地面站软件控制灭火无人机起飞,此时侦察无人机子群与灭火无人机子群进行组网通信,将火场的实时情况发送至灭火无人机,同时灭火无人机将自身携带灭火弹的实时数量发送至侦察无人机,由侦察无人机根据火势指派后续灭火无人机进行灭火作业,无消防弹的灭火无人机自动返航,由地面人员填装灭火弹。
(4)待明火被扑灭后,侦察无人机继续停留在火场周围进行过火面监视评估,待灭火工作全部结束后,控制全部无人机返航降落。

三、结语
无人机集群因其自组织协同性、功能涌现性等特性,在消防灭火工作中具有巨大的应用前景,研究其在消防灭火中的应用意义深远。利用消防无人机,及时掌握灾害现场信息,有效帮助现场指挥人员准确判断灾情,并做出有效决策。同时消防无人机集群相较于传统单体消防无人机也具有较大优势,通过各类自主协同决策机制,提高了任务执行的自主性与智能性,减小了操作复杂性。目前消防无人机的应用仍处于起步阶段,一些技术还需要不断改进和创新,需要研发机构和消防单位共同努力,从而使消防无人机集群在消防应用中不断适应实际需求,从而发挥其最大的综合效益。