基于CoDeSys的EtherCAT总线控制系统设计
2018-10-10郭奕鑫刘江帆
郭奕鑫, 刘江帆
(广东水利电力职业技术学院,广东 广州 510925)
1 项目简介
本套系统主要采用德国3S公司研发的软件—CoDeSys,CoDeSys环境中集成了多种总线协议,EtherCAT协议作为一种基于以太网技术的工业现场总线,具有诸多的优点,无论是从传输速度,还是在开放性及安全性方面都更优于传统的现场工业总线。EtherCAT总线采用“一网到底”的概念,即协议在处理过程直达底层,中间过程不需要任何的转换设备或是子总线,在CPU的循环时间和任务处理速度上传输速率能够达到100 Mb/s,几乎无网关延时。其优越的性能及总线的处理速度区别于传统的现场工业总线[1]。
2 系统的硬件设计
硬件上采用三层架构,主要表现如图1所示,第一层采用研华工控机及其辅助设备;第二层主采用支持EtherCAT总线的的华泰远程IO模块,针对下层系统实现完全的控制及监控;第三层则为车库执行系统,主要由步进驱动器、传感器、辅助按钮等开关量及采集信号构成。
EtherCAT总线的远程IO模块主包括华泰smartLink的FR8200适配器模块、8位数字量输入的FR1118模块、8位数字量输出的FR2118模块、2路高速计数器FR5002模块及支持EtherCAT总线的雷赛步进驱动器。
数字量输入模块主要用在辅助设备和传感器信号的采集,判断当前车位的使用情况,另一方面也实时检测出入库车辆的数量。高速计数器模块用于反馈执行机构的实时位置,与控制系统形成闭环控制,雷赛步进驱动器用于控制电机,以实现执行机构的运动。
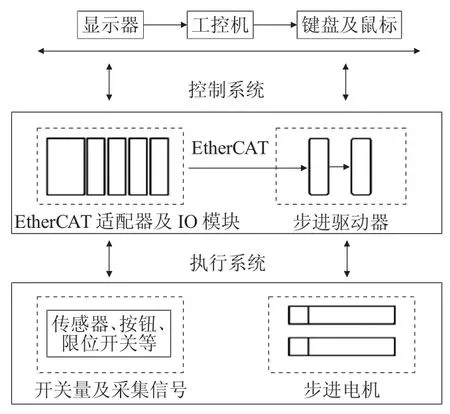
图1 硬件结构
3 控制系统的软件设计
系统的软件设计主要有三方面的内容组成:EtherCAT总线的配置、控制程序的编写和可视化界面的设计,如图2所示。
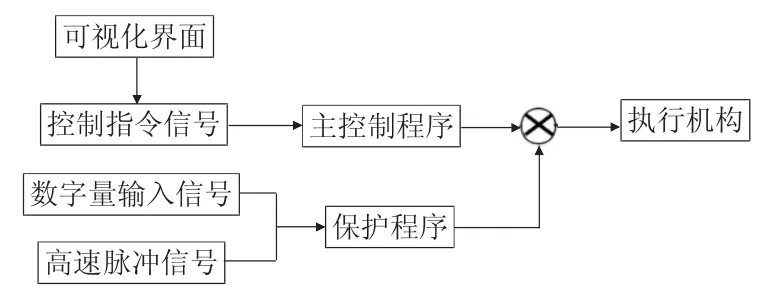
图2 控制系统的软件架构
3.1 EtherCAT总线的配置
利用CoDeSys平台对设备进行编程,需要在项目Device设备管理器上配置总线管理器,即配置EtherCAT现场总线主站。针对EtherCAT现场总线主站再配置从站模块,相应地从站模块需要在CoDeSys开发环境中安装对应的XML文件,即设备描述文件。对于运动控制模块的设计,要在项目树中的EtherCAT_Task中调用主程序,否则运动控制系统将无法正常响应。
3.2 控制程序设计
本设计的输入信号主要包括数字量信号、高速脉冲信号及可视化界面的控制指令信号。输入的数字量信号主要是对进场车辆和车库车位进行检测,保护单元程序再根据检测结果判定存取车辆是否满足先决条件,同时高速计算器信号将实时反馈传动机构的位置。在符合存取车的条件下,通过发送控制指令信号并经过主控制程序逻辑分析后,将控制对应的执行机构动作,将车辆送到指定位置。否则,控制系统将不执行控制指令的请求。
3.3 可视化界面设计
CoDeSys开发环境中可在项目应用中添加网络可视化界面,同时一个codesys工程文件中可包含多个可视化对象,并且在不同的对象之间可以用通讯连接。在编辑项目中,通过简单的拖动及配置即可关联PLC变量[2]。在程序调试阶段,可将控制程序和可视化程序一同下载进控制器,通过移动智能设备浏览器访问网络视图进行调试,突破了现场调试的硬件局限。在用户选择服务时,只需扫描特定的二维码,便可在手机或Ipad等移动智能设备上进行存取车服务。
本控制系统可视化界面分为系统界面和用户界面。系统界面主要是供控制系统后台维护使用,包含了系统的内部参数设置、报警显示、数据记录和功能调试等方面。用户界面主要是供用户进行停取车服务以及显示车位使用情况和停取车进度等信息。
4 结语
通过实验室平台测试,该控制系统能够实现远程维护和无人值守,用户可通过手机等移动智能设备自助停取车辆,并可获取车库的车位情况停听取车服务状态等信息,与传统的车库控制系统相比,有较大的应用前景。