车载电磁炮的设计与实现
2018-09-21曹靖伟张珂毛桂平蔡冬如张鹏
曹靖伟 张珂 毛桂平 蔡冬如 张鹏


摘要:在分析理解电磁线圈炮的原理及工作过程的基础上,结合当今武器装备发展现状,通过车载方式使电磁线圈炮实现移动打击与快速机动。本文从设计、制作和性能三个方面介绍如何实现电磁炮射击、移动与远程操控,从而更好应用在战场上。
Abstract: Based on the analysis and understanding of the principle and working process of the electromagnetic coil gun, combined with the present situation of the development of weapon equipment, the electromagnetic coil gun can be used to realize mobile strike and fast maneuver. This paper introduces how to achieve electromagnetic gun shooting, moving and remote control from three aspects of design, production and performance, so as to better apply to the battlefield.
關键词:电磁炮;车载;高新技术;武器装备
Key words: electromagnetic artillery;vehicle;high technology;weaponry
中图分类号:U671.91+6 文献标识码:A 文章编号:1006-4311(2018)27-0160-05
0 引言
随着世界新技术革命的蓬勃发展,高新技术越来越多的融入到武器运用中。现阶段武器装备的更新换代越来越快,其发展趋势已经从普通的热武器向高技术兵器转化。面对世界格局的新变化,各国都展开对新概念武器装备的军备竞赛。电磁发射是一种全新概念的发射方式,电磁线圈炮在军事领域有着巨大的潜在优势和广阔的应用前景。电磁炮作为新概念武器之一,具有能量高、无污染、性能好等特点被广泛关注。电磁线圈炮是指通过电磁感应原理,利用电流产生强磁场,进而利用安培力加速载荷并发射的技术。与传统依靠工质膨胀做工驱动载荷运动的发射方式相比,电磁轨道炮可将载荷加速至极高速度,加速过程更加平稳,且速度和加速度可任意调控,而且它使用的能源从火药转变为更加清洁可靠的电能,大大降低了成本和维护难度,提高了安全性和机构运行的可靠性,同时还具有能量转化效率高、结构简单、噪声小、安全性高等特点,具有较强的军事应用潜力。
本文采用车载的方式实现电磁线圈炮的移动,同时增加远程终端控制,实现对车载的移动和电磁线圈炮的远程操作以及部分附加功能,使其具备更加完善的性能。
1 车载同轴电磁线圈炮的设计与实现
广义上讲,所有驱动部分由线圈构成的电磁发射器都可称为线圈炮。所谓的线圈炮,一般是指使用脉冲或交变电流产生磁行波来驱动带有线圈的弹丸或磁性材料弹丸的发射装置,它利用驱动线圈和弹丸线圈间的磁耦合机制工作,本质上是一台直线电动机。
1.1 同轴线圈炮的原理
在电磁场中,磁感应强度,其中0真空磁导率是个常数,其值为,n为线圈的匝数,I为流过线圈的电流(图1中为单向电流流过螺线圈内部磁场)。
炮弹受到的电磁力,其中B为磁通密度,S为与磁通密度正交的面积,可见磁场密度越强,炮弹垂直于磁场的面积越大,炮弹收到的磁力越大。
如果线圈有持续的恒定电流通过,炮弹只会在线圈中作往复运动,需要计算合适的电容量,使电容的放电时间接近炮弹运动到线圈重点的时间,炮弹才能在惯性的作用下继续运动。
1.2 同轴线圈炮的设计和工作过程
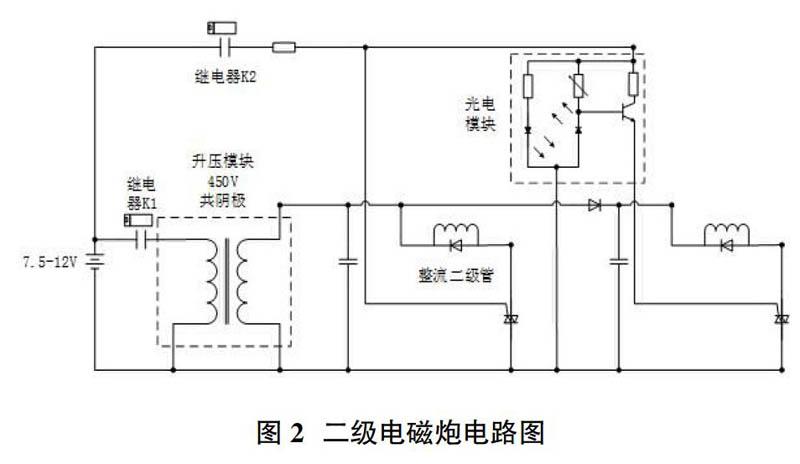
本文采用二级同轴线圈炮作为车载武器模型(图2为二级同轴线圈炮的电路图),这是综合考量线圈炮的威力要求以及小车载重要求所得到的比较合适的级数。单级电磁炮对于弹丸的选择弹性较但威力较小,射程不过1-2米;三级及以上级数的电磁线圈炮由于电容等配件的增加,重量已经影响到了小车的机动性,如果有性能更加优秀的小车可以考虑增加级数来增加射程及威力。
电磁线圈炮拥有与小车电源独立的直流电源,电压以7.5V-12V为宜,可通过DC--DC升压模块将其升压至450V给电容模块充电,注意首次充电相当于短路,需要断续充电防止电流过大烧坏升压模块,电容电压最好不超过420V以保证安全性和稳定性,每一级线圈有独立的电容模块。线圈通过可控硅开关并联在电容两端,可控硅开关的激发级分别由继电器开关K2和光电开关控制连接在直流电源正极,光电开关位于第二级线圈之前。
通过远程控制继电器开关K1闭合,升压模块开始工作给电容充电,达到一定电压关闭K1,此时线圈炮处于待发状态。控制继电器开关K2闭合,第一级线圈回路中的可控硅开关被接通,电容开始对线圈放电将线圈中的弹丸加速打出。弹丸经过光电开关两个二极管之间时光电开关被接通,使得第二级线圈回路中的可控硅开关接通,电容模块对第二级线圈放电使弹丸继续加速射出。
由于线圈实际上是一种电感,在电容放电后线圈会产生感应电动势阻碍原电流的减小,这是很危险的,因此需要利用二极管单向导通的特点回收部分感应电动势的能量,最好串联一个电阻保护二极管。
本文利用电磁原理、单片机技术以及各种驱动装置制作一台可以移动的电磁炮(如图3、图4)。下面将着重讲解其原理与构造。
2 同轴线圈炮的实现
本次实验采用两级线圈炮进行实验,介于考虑安全因素与所需功率因素,采用如下材料进行设计制作:电源开关(继电器开关)2个、整流二极管(IN4007)3个、储能电容(330~450V,200~2000UF铝电解电容)2组、共阴极升压器一个(自带整流)、可控硅(70TPS12或70TPS16)2个、光电开关1个、漆包线线圈(2个)、电源(12V 10A)、发射管(内径4-10毫米,管壁薄,硬,不导电的为宜)20厘米左右1根、100Ω电阻若干、导线若干。
由于导线、漆包线等部分裸露在外,用绝缘胶带加以包裹,使其不漏点,确保安全(如图5电磁炮实物图)。
电容对线圈放电时电流可以达到几百至上千安培,用普通的空气开关作为启动开关是危险的,这里选用可控硅开关,但需要设计额外的触发电路。
在制作线圈时,第一级线圈前5层每层35圈,第6层15圈,之后的每一级线圈层数逐渐减小,匝数逐渐增多,这样的线圈效果比较良好,但由于材料等的不同,这个方案并不绝对,需要自行探索。每级线圈之间间隔大约为2cm,这个距离并不绝对,根据每一级的弹丸初速与电容的放电时间可作调整,中间用一个光电开关作为下一级的触发开关。
在射击精度方面,采用将红外激光固定在炮管上的形式进行瞄准,通过校靶的方式调整瞄准点的位置。但这种方法的電磁炮精度不高,如果改进一下子弹弹型后,射击精度会有较大提升。比如用宽胶布在子弹上面缠一个尾翼,就像一个管子套在一个柱体上。通过实验后发现:平头弹最标准,效率也最高,均优于尖头其次。下一步将在炮管内增加膛线的方式使弹丸旋转,让弹丸在飞行过程中保持稳定的飞行姿态,以便提高射击精度。
3 车载部分材料与模块型号选择和设计
3.1 系统硬件设计
对于小车设计而言,采用五大部分设计,其中包括有最小控制系统、上位机、无线路由、驱动模块、电源电路等(系统结构框图如图6所示)。
通过图6可以看出,电源为系统各个模块进行供电,单片机最小控制系统通过接收路由器模块发来的指令实现对下位机各个模块的控制,单片机最小控制系统作为整个系统控制中心使各个模块进行相互协调工作。
3.2 核心模块的选择与设计
通过对比研究各单片机的性能,最终选用STC12C5A60S2单片机。该单片机是由我国宏晶科技公司自行生产的单时钟/机器周期(1T)的单片机,其具有高速、低功耗、抗干扰强等特点,是新一代8051单片机。其指令代码、管脚不但完全兼容传统8051系列单片机,而且其片内具有基于FLASH工艺的大容量程序存储器,用户可以直接用电的方法瞬间擦除、改写。运行速度要比传统单片机块8-12倍。虽然其功能简单,对开发设备的要求也很低,但是基本上可以达到本课题的功能要求。
本设计下位机控制系统的主控芯片为STC12C5A60S2,最小系统设计原理如图7所示,整个最小系统电路由上电复位电路、晶振电路和STC12C5A60S2芯片组成。
3.3 电机驱动模块的选择
本实验采用两台电机交叉使用,从而实现两个自由度的控制。通过研究对比,采用L298N驱动模块。L298N芯片是意法半导体公司(全世界最大半导体公司之一)生产的一种高电压、大电流电机驱动芯片。其内部集成有两个H桥的高电压大电流全桥式驱动器,L298N是15跟引脚的直插型芯片。采用标准逻辑电平信号控制,其主要特点有:工作电压高,一般在3-46V;额定功率为25W,输出电流大,电流峰值瞬间可达到3A;每个H桥可以持续的提供2A工作电流。该芯片不仅可以作为一台两相或四相步进电机的驱动器,还能够直接驱动两台直流电动机,达到本实验的需要要求。
本次设计底部采用履带式支撑结构,应用四个直流电机为整个小车提供动力,并让左边两个电机串联共同驱动,右边两个电机串联共同驱动,减少模块的使用,加强小车的平稳性。
3.4 路由器的选择
对于路由器的选择,考虑到价格、体积以及负载等方面因素,最终决定采用Robot-LinkWIFI模块。Robot-LinkWIFI模块是深圳市小二极客科技有限公司自行研发的WIFI产品。该模块采用高通AR9331作为主控芯片,其内置有厂家专有固件,支持视频传输及数据指令的双向传送功能。最大无线传输率可以达到150Mpbs,模块使用协议符合国际标准的IEEE802.11n/g/b协议。采用5V外部电压供电并提供USB数据线和手机适配器两种供电模式,其配备有32M的内存,4M的FLASH内存,调试接口齐全,大大满足了电子爱好者、DIY爱好者的需求。接口:1USB2.0、1MicroUSB(电源接口),可用排针引出的内置TTL端口及一个Reset按键。
路由器模块主要用来接收上位机传来的数据指令,并把数据指令进行转化,再以TTL电平的方式传送给单片机。
3.5 电源电路的选择
STC12C5A60S2最小系统的正常工作电压在3.5-5.5V之间,无线路由器在正常运行时需要5V的电源供电,直流电机则需要5-10V之间的电源供电,根据这些模块的供电需求,决定采用两个串联单节3.7V的二次锂电池通过XL4015降压输出稳定5V电压为他们供电,而无线路由器则单独采用5V移动电源经过USB为其供电。
本设计把供电电源分为两部分,一个是两节3.7V锂电池的串联组合,另一个是移动电源。其中两节串联3.7V锂电池经过XL4015降压模块输出稳定5V电压,为单片机、舵机以及直流电机进行供电,移动电源通过USB独立为路由器模块进行供电。XL4015可调降压电路图如图8所示。
3.6 上位机开发语言的选择
根据所学知识与运用情况,决定选择C#语言,,它秉承了C和C++的强大功能同时优化它们存在的复杂性,并结合运用了VB的可视化图形操作用户界面和C++的高速运行效率的优点。
本设计选择在C#语言框架下的Windows窗体应用程序进行开发。在Windows应用程序窗体中添加本设计所需的控件,设计好控件的分布结构,然后在各个控件中编写相应的代码,设定好通信串口和与下位机的通信协议。这样基本完成上位机软件的设计。
3.7 其他附件的选择
在本课题设计中,摄像头模块主要负责采集高清视频图像信息,通过路由器的SOCKET服务将采集到的高清视频图像信息进行打包,并传到上位机上。点击提前设置好的“开启摄像头”控件,上位机界面上的视频窗口就会显示摄像头采集到的视频画面,实现实时视频传输功能。最终采用USB无驱高清摄像头。
在舵机云台的选择中,使用SG90小型舵机,采用两个舵机叠加的方式实现二自由度转向。
4 系统软件设计
4.1 主函数流程图
本次程序设计主要分为上位机程序设计和单片机程序设计两大部分,每部分又由各个子程序模块组成。上位机软件程序需要基于车载小车的功能进行开发,以C#语言为基础,主要包括:电机驱动模块、舵机、视频传输等。
单片机软件程序大致分为三大部分:主函数、串口接收中断函数和数据指令解码。主函数流程图如图9所示。
4.2 上位机C#程序设计
上位机设计是在Visual Studio 2012集成开发环境下进行开发的,并采用 C#语言结构框架进行编程的,大致的编程设计过程如下:第一步:先在VS2012集成环境下创建一个基于C#框架上的窗体开发项目。第二步:在Form窗体中添加本设计所用到的控件。第三步:在每个控件中编写相应的指令代码。第四步:设定好与WiFi模塊的通信协议。第五步:联合调试。
5 实验相关参数测量及误差分析
5.1 实验相关参数测量
在实验中,分别在距离胸环靶靶心1米、5米、10米、15米处各射击10枚炮弹,看击中胸环靶的环数,测量精确度并绘制表格(如表1所示)。
第二次实验中,让小车以0.3m/s的速度前进,以同样方式进行实验,测量精确度并绘制表格(如表2所示)。
第三次实验中,让小车以0.3m/s的速度后退,以同样方式进行实验,测量精确度并绘制表格(如表3所示)。
5.2 实验误差分析
经实验发现,在击发后的弹丸是以纵向旋转的姿态向前运动,这是影响射击精度的原因之一;其次,在校靶后的射击中,弹丸多集中在靶纸下方且弹丸大多横向打到靶纸;第三,射击五次左右需要重新校靶才能保证原有射击瞄准点在靶心处;在移动射击中,射击精度会降低很多,但向前运动时精度高于向后运动时的精度。
由于弹膛内没有膛线,无法使弹丸赋旋,导致弹丸射出后运动不规则;弹丸射出后,由于重力影响,会使弹丸向下运动,导致弹丸大多集中在瞄准点下方;由于弹丸后坐力较大,射出后炮管会有轻微抖动,导致激光偏离原来瞄准位置,所以在射击一定次数后,要重新进行校靶。
6 总结
本实验已初步实现电磁炮的移动射击和远程操控,并能够以视频传输的方式摆脱传统射击方法,但在实验中存在炮弹初速不足,易损失射速等缺陷,拟在下次实验中,在炮管中增加膛线来解决类似问题。在车载电磁炮的整体设计中,由于设计考虑不足,无法实现炮弹的自动进弹和连续射击,在以后实验中望能够加以弥补,使实验更加完善。
参考文献:
[1]明日科技.C#从入门到精通[M].北京:清华大学出版社,2012.
[2]肖春华.单片机借口技术与应用[M].北京: 化学工业出版社,2015.
[3]Mickey Gousset.Visual Studio 2012应用[M].北京:清华大学出版社,2014.
[4]关晓存.单级感应线圈炮场路耦合运动有限元分析[N]. 电工技术学报,2011-9-26(9).
[5]刘守宝.改进电流丝法在感应线圈炮场路分析中的应用[N].电机工程学报,2010-10-30(30).