基于15单片机的电动门和电动停机坪控制
2018-09-20周松涛何泽文马奔
周松涛 何泽文 马奔
摘要:本设计来自广东大学生科技创新培育专项资金(攀登计划)支持项目——无人机无线充电系统的研究与开发。本论文着重论述无人机无线充电站的电动门和电动停机坪的功能和实现。设计系统以IAP15W4K58S4单片机为处理器,使用42两相混合式步进电机和直流电机提供动力,用螺杆将电机角位移转换成线位移,实现控制物体的动作变化。本系统电路简单、调试方便、成本低廉,与无线充电系统相互独立,可以直接用作其他系统的机械结构,具有一定的实用价值。
Abstract: This design is a special fund (climbing program) to support Guangdong university students' scientific and technological innovation cultivation—Research and Development of Wireless charging system for UAV. This paper focuses on the function and realization of the electric gate and the electric apron of the wireless charging station of UAV. The design system is based on IAP15W4K58S4 single chip microcomputer,using 42 two-phase hybrid stepping motor and DC motor to provide power, converting the angular displacement of the motor into a linear displacement with a screw, and controlling the movement change of the object. The system has the advantages of simple circuit, convenient debugging and low cost, and is independent of the wireless charging system. It can be directly used as mechanical structure of other systems and has certain practical value.
关键词:IAP15W4K58S4;步进电机;直流电機
Key words: IAP15W4K58S4;stepping motor;DC motor
中图分类号:TM33 文献标识码:A 文章编号:1006-4311(2018)29-0161-03
0 引言
电动门系统主要是指由单片机控制以及电机驱动的一种开关门机构,电动停机坪是指由单片机控制以及电机驱动的一种电动运输平台。在日常生活中,经常可以看到各种电动门系统,例如银行的感应门。这些电动门在人接近时打开,人离开后关闭,可以快速实现两个空间的隔离。电动运输平台常应用于工厂里的产品移动。这些运输平台,在短距离移动产品的处理上,拥有快速高效、平稳安全和运输量大的特点。本设计使用一个15单片机控制了上述两套系统,为无人机无线充电项目创造了与周围环境隔离的充电舱和安全平稳的电动停机坪。
1 总体方案设计
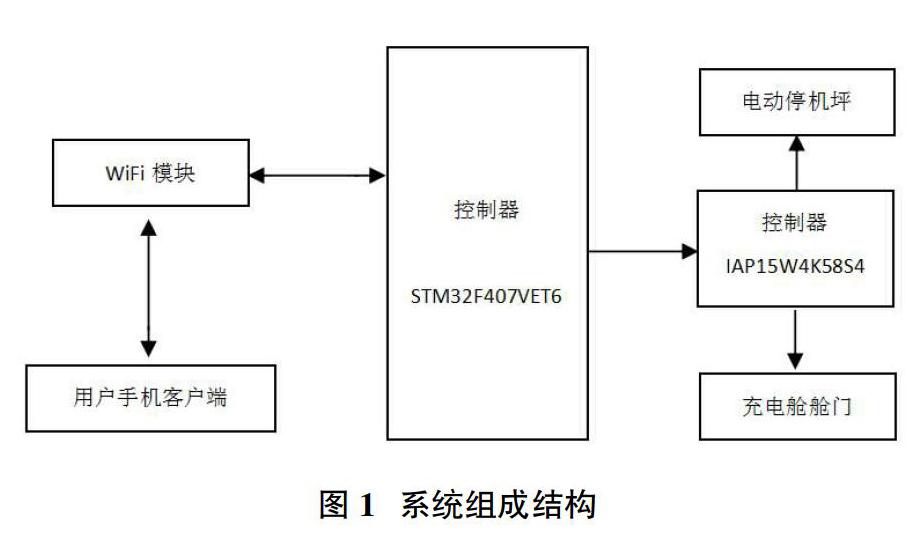
该设计以IAP15W4K58S4单片机为控制核心,实现控制电动门开关和电动停机坪进出充电舱的功能。通过单片机的P1口检测来自STM32的控制信号,将用户的操作命令转变成步进电机和直流的定向转动,实现系统规定的动作。系统组成方框图如图1所示。
2 系统主要硬件模块介绍
2.1 IAP15W4K58S4单片机
IAP15W4K58S4,是当今使用广泛的机器周期为1T的单片机,比12T 的单片机执行速度快 12倍,拥有低速模式、空闲模式、掉电模式和停机模式四种模式,工作电压2.5V至5.5V,是运算速度高、可靠性强、环保节能、不惧怕各种干扰的8051 单片机,采用宏晶专利的第八代加密技术,下载的程序保密性好,而且指令兼容传统51单片机,使用者可以维持原来的开发习惯。
2.2 42两相混合式步进电机
步进电机是将来自控制芯片的高低电平变化转换成相应的角位移电动机,而且是一种开环控制的电动机。每当步进电机接收到一个脉冲激励信号,电机转子就会转动,转过的距离被称作步角距,步距角的大小由步进电机自身规格型号决定。使用步进电机的关键在于脉冲信号,使用者通过设置它的个数和频率,来控制电机的角位移量和速度。因此只要经过简单的计算,就能准确给电机定位和控制电机快慢。步进电机分类方法很多,以产生力矩的方式划分可以分为反应式、永磁式和混合式三种。
本设计使用的是42两相混合式步进电机。这类步进电机的转子使用永磁性材料制成并且做成齿形,电机定子结构与反应式步进电机的定子类似并且有齿,能集合反应式步进电机和永磁式步进电机的优点,步距角小,精度高,当相同的脉冲激励信号时,混合式步进电机产生的转矩大于反应式步进电机,所以混合式步进电机的应用最为广泛。
2.3 直流减速电机
直流减速电机,是在直流电机的基础上,为适应大扭矩输出的要求加工而成。直流电机是将电能转化为机械能的机器,电机内部有永磁体,一旦电机通电,电机的线圈就产生安培力,推动转子转动。通过电机前段的换向器,保持电机的转向不变。
在直流电机的后段加装齿轮减速箱,就是直流减速电机。齿轮减速箱内部有多个不同大小的齿轮,利用齿轮传动的作用,逐级降低电机输出速度,实现较大的力矩输出。为使项目的无人机平稳的进出充电舱,兼顾运输平台的速度和拉力,我们选择输出转速每份钟50转的、输出力矩8千克厘米的24伏直流减速电机。
2.4 直流电机正反正反转控制模块
本设计使用正反转模块,实现电机的转动控制。单片机的P3口与模块的电机控制端组成回路,利用低电平触发,能有效控制模块的输出端的电流方向,实现电机的正反转。在运输平台下安装四个电机和轮子,在单片机编程上设计四个轮子的转动方式,可以实现电动停机坪的进出舱控制或者转向。
3 软件部分的设计
3.1 主程序设计
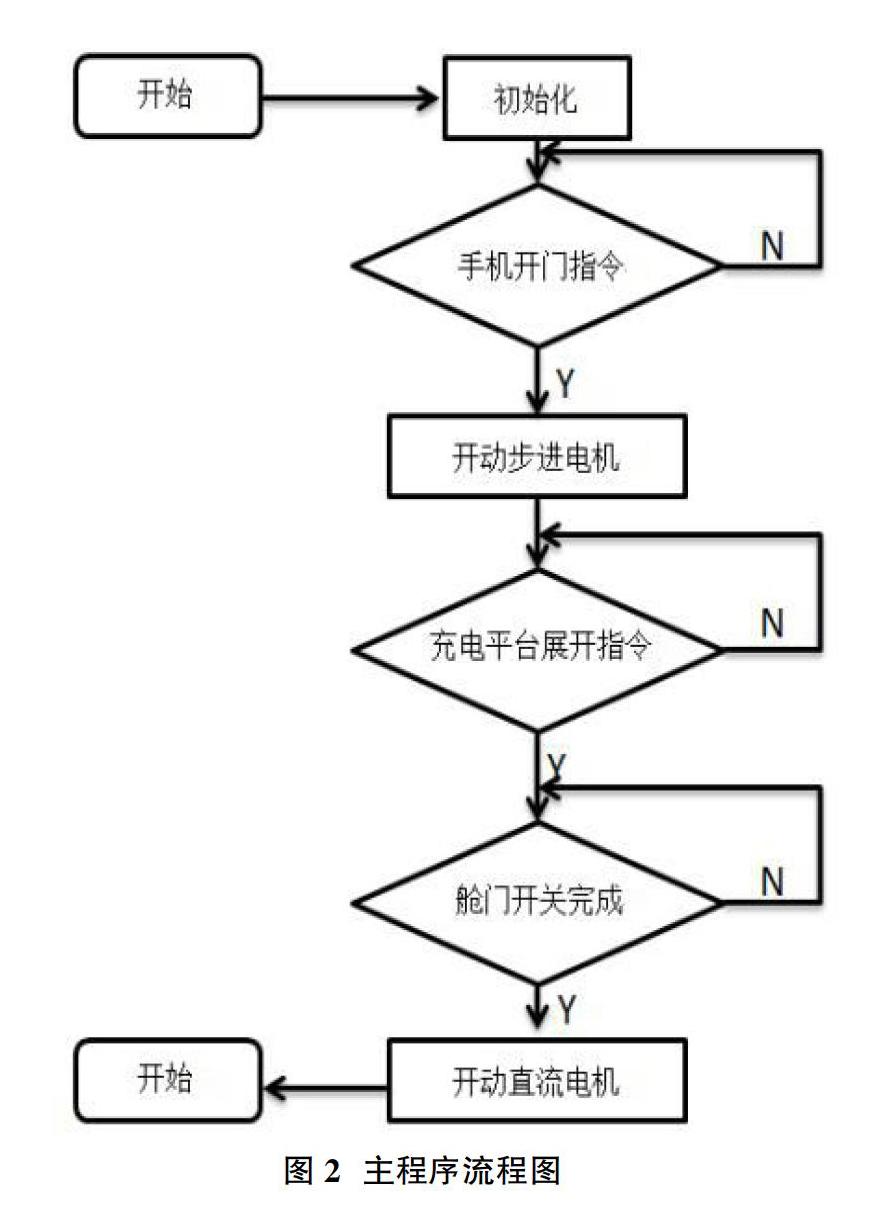
本设计对程序的框架,根据功能的不同划分了不同的模块,逐个模块编程调试,最终把各个子模块有序的连接起来,构成总的程序。主程序流程图如图2所示。
主要源程序如下:
int main(void)
{
IO_Init();
RLED = LED_OFF;
GLED = LED_OFF;
BLED = LED_OFF;
APP = LED_OFF;
Drive_tingctrl();
P27 = 1;
P26 = 1; //电机使能信号
while(1)
{
if(P10==1)); //接收stm32发送的信号
{
GLED = LED_NO; //只开绿灯
motor_ctrl(FALL); //PB0,P05绿灯开门
GLED = LED_OFF;
}
if(P11==1)); //接收stm32发送的信号
{
BLED = LED_NO; //只开蓝灯
motor_ctrl(FALL); //PB1,P06蓝灯开门
BLED = LED_OFF;
}
if(P12==1)); //接收stm32发送的信号
{
RLED = LED_NO; //同时开红灯和绿灯
GLED = LED_NO;
Drive_chuctrl(); /出舱
RLED = LED_OFF;
GLED = LED_ OFF;
}
if(P13==1)); //接收stm32发送的信号
{
RLED = LED_NO; //同时开红灯和绿灯
GLED = LED_NO;
Drive_jinctrl() //进舱
RLED = LED_OFF;
GLED = LED_ OFF;
}
}
}
3.2 步进电机程序设计
42两相混合式步进电机,步距角1.8度,步进电机转动一周360度,所以200个脉冲激励信号可以使电机转动一圈。步进电机上的螺杆为T8型螺杆,导程2毫米,螺母在这种螺杆上转一圈所发生的位移是2毫米。考虑到电动门的完全展开为1000毫米,单个步进电机的动作计算应为:S=d·n,其中d为螺杆导程;n为步进电机转动圈数。
为了方便计算单片机输出的激励信号数量,步进电机转动圈数应转换为激励信号数量i表示,他们之间的关系是:n=?琢·i。将实际数值带入计算,i取值50000,在调试过程中再作修改,部分程序如下:
void motor_ctrl(u8 dir)
{
u16 i = 50000;
if(dir)
{
DIR1 = FALL;
DIR2 = FALL;
}
else
{
DIR1 = UP;
DIR2 = UP;
}
while(i--)
{
PUL1 = 1;
PUL2 = 1;
DelayUS(DELAY_TIME);
PUL1 = 0;
PUL2 = 0;
DelayUS(DELAY_TIME);
}
}
3.3 直流電机程序设计
在这里,重申本系统使用的直流电机的参数。直流减速电机,工作电压24伏,空载转速50转每分钟,空载电流0.13安倍,负载转速45转每分钟,负载电流0.62安倍,额定力矩8千克厘米。电动停机坪的轮胎直径65毫米,那么电动停机坪进出舱的运动计算是:。
将实际数值代入计算,得出时间t取值为5.876秒,编程取值6秒,部分程序如下:
void Drive_jinctrl(void)
{
zhengzhuan1 = 0;
zhengzhuan2 = 1;
zhengzhuan3 = 1;
zhengzhuan4 = 0;
fanzhuan1 = 1;
fanzhuan2 = 0;
fanzhuan3 = 0;
fanzhuan4 = 1;
DelaySEC(time); //讓电机持续转动
Drive_tingctrl(); //停电机
}
void Drive_chuctrl(void)
{
zhengzhuan1 = 1;
zhengzhuan2 = 0;
zhengzhuan3 = 0;
zhengzhuan4 = 1;
fanzhuan1 = 0;
fanzhuan2 = 1;
fanzhuan3 = 1;
fanzhuan4 = 0;
DelaySEC(time); //让电机持续转动
DelayMS(500);
Drive_tingctrl(); //停电机
}
4 软硬件联合调试
本设计的编程软件是在Keil C。Keil u Vision5 软件支持89C51单片机的C语言的编程及调试,运用非常方便,有效提高了编程制作效率。根据本次系统的软件构思,因为螺杆和轮胎等机械结构的实际特性不好仿真,所以程序的调试全部在机械结构实物搭建起来后进行。步进电机和直流电机的控制关键在时间,软件调试过程,就是测试上面计算的数值是否合适的过程。
在硬件调试方面,首先根据硬件电路图检查了各个器件的型号、规格、参数是否正确;第二步,检查原理图与所用器件的引脚是否吻合,进而排除逻辑上的错误;第三步,使用万用表等工具检查硬件电路的接线,检查有无短路、虚焊或者开路的现象;第四步,设备按照不同的功能分别接通电源,检查时各个器件运行时有无发热失控等不良现象,整个系统的功能是否符合要求。
在机械结构实物的调试中,发现原来用作固定步进电机的4毫米PVC板硬度不足,这种板材不能为工作中的步进电机提供足够的支撑,不能承受开关门的作用力,导致电动门调试中容易出现错位或者晃动,威胁了系统中其他器材的安全。为此我们使用木头对板材进行加固,加固后的电动门运行正常,但使用一种更坚硬的材料来承受步进电机的作用力是最好的办法。
5 结论
本设计以IAP15W4K58S4单片机为主控芯片,实现对无人机无线充电站的门控和承重平台的设计,与无线充电站的其他功能不在一块控制器上执行,程序具有一定的独立性和可移植性。该电路具有成本低廉、结构简单、反应速度快等优点,可以广泛应用于开关门控制和自动化物流等需要隔离和运载的领域。
参考文献:
[1]陈东平.基于单片机的电机控制电路改造[J].科技信息, 2010(04):392-394.
[2]黄赞.基于AT89C51单片机的步进电机伺服系统设计[J].机床与液压,2004(03):48-49,56.
[3]K. N. King. C语言程序设计现代方法第[M].二版.北京:人民邮电出版社,2010.
[4]张伟.单片机原理及应用[M].西安:机械工业出版社,2002.
[5]宋锦河.步进电机控制系统的快速实现[J].鄂州大学学报,2004(04):4-7.
[6]王成元,侯曦瑞,夏加宽.轮式机器人用直接驱动电机的设计[J].沈阳工业大学学报,2008(02):121-124,138.