太阳能电板自动跟踪系统设计研究
2018-09-20张春梅
张春梅
摘要:本文是基于PLC的太阳能自动跟踪系统设计, 利用四象限探测器采集光电信号,关于这个器件的具体应用将在下文做详细介绍,然后通过自己设计的放大电路进行处理,放大电路设计方案也在下文给出,这就是为系统的信号接收装置。①使用PLC作为控制核心,并且要巧妙的结合PLC的功能进行设计,充分发挥PLC的作用。②利用PLC和步进电机驱动器对步进电机进行控制。③利用光电编码器对电池板的位置进行反馈,从而实现闭环控制。设计中最大的特点就是硬件系统比较简单,成本低且容易获得,另外还具有比较高的跟踪精度。
Abstract: This paper discusses the design of solar energy automatic tracking system based on PLC. The four-quadrant detector is used to collect photoelectric signals. The specific application of this device will be described in detail below, and then processed by the amplifier circuit designed by ourselves. The amplification circuit design scheme is also given below, this is the signal receiving device for the system. ①Use PLC as the control core, and skillfully combine the functions of PLC to design and give full play to the role of PLC. ②Control the stepper motor with PLC and stepper motor driver. ③Use the photoelectric encoder to feedback the position of the panel to achieve closed-loop control. The biggest feature of the design is that the hardware system is relatively simple, low cost and easy to obtain, and has a relatively high tracking accuracy.
關键词:四象限探测器;PLC;步进电机;光电编码器
Key words: four quadrant detector;PLC;stepper motor;photoelectric encoder
中图分类号:TM914.4 文献标识码:A 文章编号:1006-4311(2018)29-0146-03
0 引言
太阳能用途广泛且为可再生资源,但是采集是难题,如何高效采集太阳能并合理利用是关键,目前太阳能采集装置多是固定式影响采集效率,本文设计自动跟踪装置可有效提高太阳能采集量和利用率。光电式控制和四象限探测器采集到精准的跟踪信号,将跟踪信号送到控制器,通过PLC程序控制双轴系统,此外使用闭环控制,进一步缩小误差,提高跟踪精度。优势为一方面,本文设计跟踪系统可以更好的跟踪太阳精确采集,另一方面,系统硬件设计简单节省成本。
1 系统硬件设计
该系统硬件结构主要由四部分构成,信号收集与处理、PLC处理、步进电机执行部分、反馈系统。
1.1 信号收集与处理
信号收集是由四象限探测器来完成的,它的主要器件是光电二极管。四象限探测器在光强下会产生光电流,但该电流太小,不易被区别,所以必须要有放大电路和处理电路,将电流信号放大后变成电压信号,便于输入到PLC中。该种探测器有很多类型其原理基本相同,优点是使用寿命都长,节省成本,响应速度快,从而提高系统的响应速度及时跟踪太阳。
四象限探测器由四个光敏面构成,每一个面有一个输出端口,外加两个公共端,所以共6个输出端口。
主要原理是:有四个象限,当有光照在这个探测器上时,由于光有能量,会激发探测器上的导体,使其产生电流,电流大小与光的强度有关。如果四个象限上的光强不一样,则每一个象限上的电流就不一样。通过这一原理,可以检测电流大小来判断光源位置电流大处光强。使用四象限探测器来跟踪光束的方法是将探测器放入遮光桶中,这样就形成了一个信号采集器。当太阳光从遮光桶的上部小孔进入后,会在遮光桶底部有一个斑点,这个斑点称为光斑。当太阳正对着小孔时,光斑会和底部探测器的中心重合。如果不重合的话,则说明太阳不是正对小孔,即说明太阳发生了偏移,这时四个象限由于光强不一样导致光电流不一样,这样就可以将电流经过运算后算出光斑的偏移量包括大小和方向。光斑的大小和遮光桶的高度将会影响系统的精度,这里所使用的光斑大小为探测器半径的0.5倍,遮光桶的高度为1cm。
通过观察两个中心(光斑中心和探测器中心)是否重合得出太阳位置。如果重合说明太阳正对遮光桶小孔进而说明电池板正对太阳转台不需要旋转;如果不重合,则说明太阳光不是垂直射入,此时可以用Δx表示光斑位置在X轴的偏移量,Δy表示Y轴的偏移量,这两个偏移量表示太阳光在水平方向与俯仰方向的偏移量。如果用i1,i2,i3,i4分别表示探测器四个象限的输出电流,i1=i2=i3=i4,表明中心重合,即Δx=0,Δy=0。因为输出的短路电流非常小,所以要用放大电路处理成电压信号,四个象限可以用u1,u2,u3,u4表示,用ux和uy表示水平和俯仰方向
运算放大电路的设计:从前面的分析,我们知道探测器的输出信号为电流信号,并且这种信号很小,不能被PLC直接读取,所以必须经过运算电路处理,处理后的信号属于电压信号,并且在PLC的识别范围内,可以直接读取。影响放大电路工作的一个很重要的因素就是噪声。因此放大电路的设计主要原则就是要尽量减少噪声,只有这样才能得到比较准确的输入信号。从前面的介绍知道,放大电路要包含2个内容,其中最重要的一个就是要把电流信号通过放大电路后变为电压信号,另外就是要把放大电路设计的合情合理,一方面噪声要比较低,另一方面就是要有比较高的精度。将电流转变成电压很简单,加一只电阻就行了,但是电阻值要准确,另外电阻受热时,变化值不能太大。为了降低噪声,可以选择精度比较高噪声比较低的运算放大器电路图1所示。
由公式可知放大后的电压在PLC能接受的范围5V内。由于中午太阳最强烈,但距离比较远,所以最大电压大概为2V。然而运算电路的放大倍数不能太大,输出的电压信号要符合PLC对电压的要求。
和差与除法电路设计:根据前面的公式设计和差电路,假设信号放大后的四路电压信号分别为u1,u2,u3,u4。经过和差运算后得到三路输出信号,分别为ux和uy,外加信号总和usum。求差电路图2所示。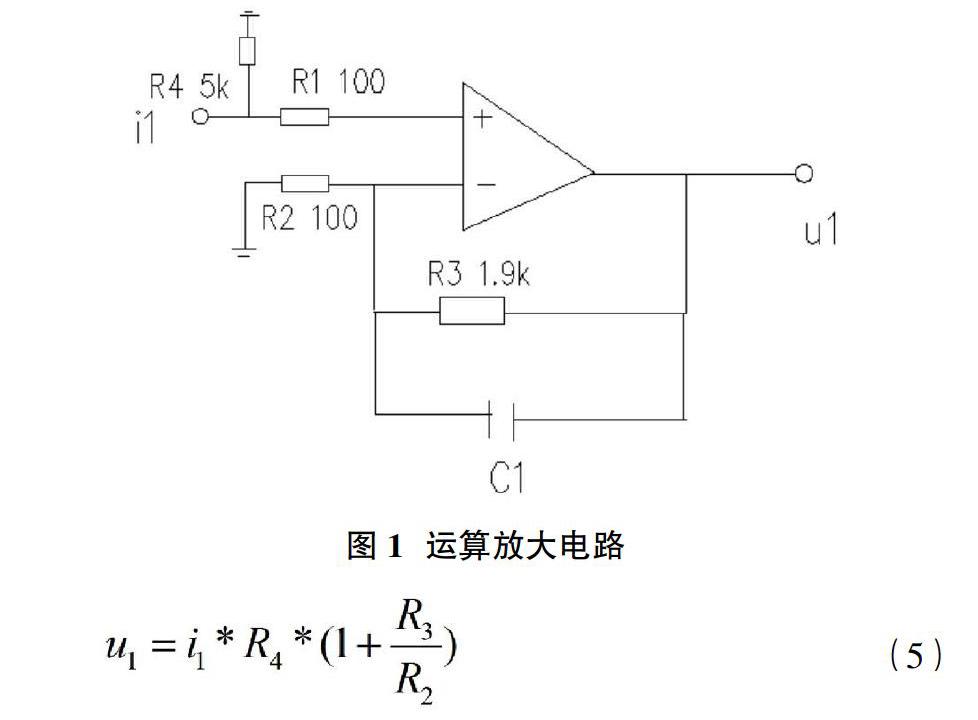
图2表示的是ux,同样也可以得到uy。另外,亦可以求得usum。
当各个和差电路都已经设计好后,剩下的就是除法电路了。除法电路主要是由四象限乘法器MC1494和OP07CP构成。MC1494为变跨导四象限模拟乘法器,参数特性如下所示:①具有了良好的线性性能;②电源典型输入电压为±15V;③输入端(X/Y)最大误差:±1%;④输入电压范围:±10V;⑤具有可调节的比例系数K;⑥频率响应(3.0DB小信号时):l.0MHz;⑦电源灵敏度典型值:30mV/V通过除法电路,便可以得到Hx和Hy,从而完成了信号采集和处理部分的内容。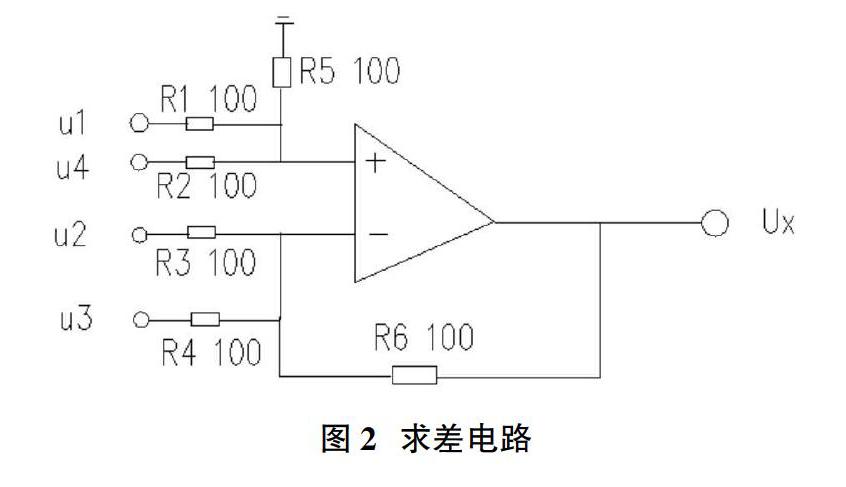
1.2 PLC系统
PLC是系统的核心部分,本系统选择西门子PLC S7-200属于小型控制器,S7-200系列具有很强的功能,负载电源是24V并且集成在内部,CPU 221,222具有180mA输出,CPU 224,CPU 224XP,CPU 226分别输出280,400mA。可用作负载电源。CPU从221到226每一种都有2个类型,他们的电源电压不同,控制电压也不相同。数字量输入/输出点:CPU 221:6个输入点,4个输出点;CPU 222:8个输入点,6个输出点;CPU 224:14个输入点,10个输出点;CPU 224XP:14个输入点,10个输出点;CPU 226:24个输入点,16个输出点;模拟量输入/输出点:CPU 224XP:2个输入点,1个输出点;高计数器:CPU 221/222有4个高速计数器,可以编程,其两个输入端具有同时计数不同方向的脉冲数,通过加减来完成。这两个输入端可以用来和相应的光电编码器连接,另外这些高数计数器还具有复位输入的功能。结合该系统所要实现的功能,本课题选择了224XP。数字量输入/输出点:14输入点,10输出点;模拟量输入/输出点:2输入点,1输出点;扩展模块:可连接7个扩展模块;高速计数器个数:6个独立的高速计数器(100kHz);脉冲输出个数:2个100kHz的高速脉冲输出通讯口个数:2个RS485通讯/编程口。
1.3 步进电机
步进电机是线性控制的,这样的控制有一个很大的优点,那就是没有累计误差,也就是说这一步的误差不会累积到下一步,这样就不会使得误差被逐渐放大。步进电机本身不能工作,必须要和驱动器配合才能工作,这样的配合是通过脉冲来实现的,驱动器发出一个脉冲,步进电机就会转过一个角度,这个角度有一个专业术语,叫步距角。因此我们很容易想到转台需要的旋转角度可以利用步进电机来实现,即可以给步进电机一定的脉冲数,然后带动转台旋转。步进电机有一个致命的缺点,那就是它很容易发生振荡,振荡对一个电机来说是很危险的,振荡严重的话可以直接毁掉电机。所以步进电机一定要和驱动器配合工作,因为驱动器可以减少步进电机振荡的频率和幅度,从而最大限度的保护步进电机。细分技术在驱动器的应用可以有效降低振荡的产生,从而保护电机的安全。西门子PLC与DM432C相连接,PLC输出端口Q0.0和Q0.2分别为水平和俯仰方向的脉冲输出端口,这两个端口分别连接两个驱动器,每一个驱动器有两个输入端口,所以它们的另外一个端口分别与Q0.1和Q0.3连接,Q0.1与Q0.3是方向信号端口。
1.4 反馈环节
本系统反馈环节是通过光电编码器完成的,加入反馈环节可以及时对步进电机转过角度进行有效的校正,减少误差,从而提高自动跟踪系统的精度。光电编码器结构简单,使用寿命很长,并且抗干扰能力也很强,可靠性比较高。本系统使用的编码器型号为R3888G0524。
2 总结
本文是基于PLC的太阳能自动跟踪系统设计利用四象限探测器采集光电信号。
①利用光电跟踪方式对太阳进行追踪,另外使用双轴进行两个方向的跟踪,双轴跟踪弥补了单轴追踪的不精确,四象限限探测器用来接收光信号,实现对太阳的定位,它价格便宜,所以性价比比较高。
②使用PLC作为控制核心,并且要巧妙的结合PLC的功能进行设计,充分发挥PLC的作用。
③利用PLC和步进电机驱动器对步进电机进行控制。
④利用光电编码器对电池板的位置进行反馈,从而实现闭环控制。设计中最大的特点就是硬件系统比较简单,成本低且容易获得,另外还具有比较高的跟踪精度。
参考文献:
[1]吕生强.四象限探测器的激光探测与定位研究[D].江蘇:南京理工大学,2006.
[2]冯龙龄,邓仁亮.四象限光电跟踪技术中若干问题的探讨[J].红外与激光工程,1996,25(1):16-21.
[3]张嘉英.光伏发电自动跟踪系统[D].内蒙:内蒙古工业业大学,2006.
[4]党丽萍.象限探测器的输出特性及优化[J].光电工程,2010,37(1):1-6.