毛豆机械化收获国内外研究现状及展望
2018-09-19朱建锡陈长卿徐锦大
朱建锡,郑 涛,陈长卿,费 焱,徐锦大
(浙江省农业机械研究院,浙江 金华 321017)
毛豆又称为枝豆或者菜用大豆,是指豆荚饱满,荚色、籽粒呈翠绿色,在籽粒还没有达到完全成熟,即生理上处于R6(鼓粒盛期)至R7(初熟期)籽粒填充达到荚长的80%~90%时采收的大豆类型[1]。我国毛豆主要采摘鲜荚,经加工处理,速冻冷藏后出口日本、欧美等国家[2]。由于毛豆生长周期短,一年可种植两季,产值较高,一般亩产500~600 kg,在价格好的年份亩产纯利润可达800~1200元[3],经济效益非常显著,已逐渐成为我国出口创汇的主要蔬菜之一。目前,中国是世界上最大的菜用大豆生产国和出口国,栽培面积在10万~15万hm2之间,主要产区为浙江,福建,江苏等沿海地区及南方其它省区。2011年浙江省毛豆的种植面积约为6.67万hm2,江苏省约为3.3 万~4万 hm2。
毛豆豆荚的特点一是鲜嫩,不能受重力打击或挤压。二是数量大,每亩株数多,约2万~3万株。三是分布不集中,全植株上下几乎各节都有,必须一株一株处理,一节一节采摘,这些给采摘增加了相当大的难度[4]。现在人工每采摘一亩豆荚,按平均亩产1500斤鲜荚,每斤采摘人工工资0.35元计算,每亩仅采摘就约需10个工人,工资费用超过了500元[5]。毛豆采摘效率低,制约了生产的扩大,费用高,增加了生产成本,影响了农民的收入。如果能够实现毛豆的机械化采摘,一是有利于增加毛豆产量,满足社会的需求,二是有利于增加农民收入。
1 国外毛豆收获机研究现状
美国的毛豆收获机主要采用非切割,利用两根旋转轴使单株毛豆从旋转轴中间通过从而拍落豆荚的收获方式。拍落方式主要有螺旋型和旋转毛刷型两类。从文献检索来看,美国在20世纪50年代就研制成功了一种毛豆收获机。该收获机结构较复杂,而后在1969年出现了一种结构较简单,可独立进行田间收获的螺旋式小型毛豆收获机。2000年美国内布拉斯加大学生物系统工程学院C.Mesquita等人对毛豆收获机的收获方式、结构、收获效率、破损率、能耗等进行了比较全面的研究。2009年美国Rogerio Cruz Moreira等人研制了一种可悬挂的旋转毛刷型毛豆收获机。
美国H.Morgan等人研制出了一种豆荚类蔬菜和水果收获机。该收获机的机架由安装于行进轮上的薄壁圆柱体(D≈1000 mm)组成。该薄壁圆柱体前端敞开,以使单株毛豆能够进入到圆柱体中。在薄壁圆柱体的前下端焊有一对平行且对称于圆柱体中心线的扶禾机构,在扶禾机构之间连接有一个大约半个圆柱体长的矩形狭槽以引导毛豆枝干进入到圆柱体中。薄壁圆柱体内盘绕有刚性螺旋杆,该螺旋杆通过焊接盘绕并固定在圆形支撑板上,螺旋杆由安装于薄壁圆柱体上端的汽油机通过减速带传动从而实现绕中心轴的旋转。螺旋杆的前下端安装有一个可旋转的螺旋刷子,该螺旋刷子由六圈与螺旋杆旋向相反的螺旋杆组成并通过圆柱轴承和支撑架固定于薄壁圆柱体上。螺旋刷子的直径大约为螺旋杆直径的四分之一,由汽油机通过驱动杆和带传动带动旋转。螺旋杆和螺旋刷子共同组成了该收获机的执行机构,在进行收获作业时螺旋杆顺时针慢速(20~30 r/min)旋转,螺旋刷子高速(螺旋杆转速的2~3倍)逆时针旋转进而将进入圆柱体的毛豆打落实现毛豆的收获如图1所示。在薄壁圆柱体后半部分的下端开有一纵向槽,在纵向槽的正下端安装有一传送带,该传动带用于收集打落的毛豆然后将毛豆送至板条式上升带中。
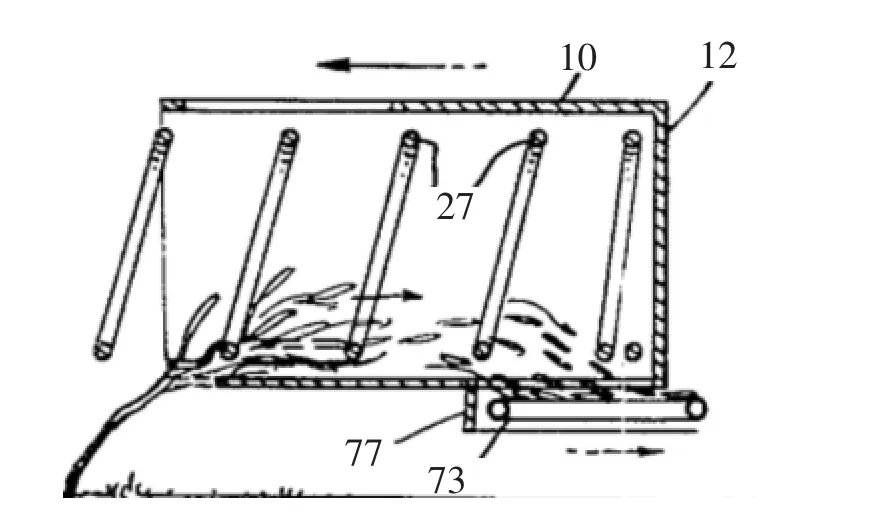
图1 毛豆收获示意图
2000年美国内布拉斯加大学生物系统工程学院C.Mesquita等人对旋转轴式毛豆收获机构行了研究,该机构主要由两个互相平行且旋向相反的旋转轴和安装在旋转轴上的尼龙绳组成。旋转轴直径为3.1 cm,长度为1.5 m,两根旋转轴之间间隔为10 cm并与水平线成30°,每根尼龙绳长度为10 cm并且间隔1 cm。旋转轴以2600 r/min的速度带动尼龙绳旋转,从而实现豆荚的收获。该机构可通过三点连接在拖拉机前端拆卸、安装方便。在进行收获作业时,驱动旋转轴的扭矩大约为3.5 Nm,并且在4个不同的行驶速度(2.2,3.2,6和 7.2 km/h)下作业 1 h所需的能量分别为6.7,4.7,2.4和2 MJ/ha,由于直接在植株上收获豆荚因此相比于传统的联合收割机(80 MJ/ha)减少了能量消耗5~16倍。采用随机化完全区组设计对10个重复样本在 4个不同的行驶速度(2.2、3.2、6.0、7.2 km/h)下的收获效率、豆荚分离率、收获杂质率进行了试验研究。根据试验结果认为:(1)在较高的行驶速度(6.0,7.2 km/h)下豆荚分离率降低了24%而收获效率较行驶速度为2.2 km/s和3.2 km/s时并未明显降低,因此当行驶速度为6.0 km/s或7.2 km/s时具有较大的优势。(2)在4个不同的行驶速度下收获的杂质率平均值为29%比传统的联合收割机(几乎为100%)要低很多。同时采用另一个随机化完全区组设计对4个重复的样本在4个不同的行驶速度(2.2、3.2、6.0、7.2 km/h)下的机械损伤率、机械破损率、种子存活率进行了试验研究。根据试验结果认为:(1)与人工采摘相比较,豆荚的损伤率并没有明显增大但相比于传统的联合收割机损伤程度明显减少。(2)在4个不同的行驶速度下豆荚的平均破损率为0.4%而联合收割机为8.38%。(3)当行驶速度为6.0 km/h和7.2 km/h时种子的存活率(78.5%、74.0%)与人工采摘(78.5%)大抵相同,但行驶速度为2.2 km/h和3.2 km/h时存活率(67.2%和67.0%)明显降低。
美国Rogerio Cruz Moreira等人研制出了一种毛豆收获机。在作业时使毛豆从两根平行旋转轴(L=1500 mm,D=25 mm)中间通过,旋转轴上安装有脱粒吊环,而在脱粒环上又嵌有六根刚性细杆。旋转轴由电机通过齿轮箱带动旋转(2600 r/min)从而实现毛豆豆荚的收获,收获机的前进速度为5 km/h。在两根平行旋转轴的下方装有气动系统,该气动系统由鼓风机和空气管组成,主要用来收集打落的豆荚,将豆荚吹向输送管从而进入收集室。
2 国内毛豆收获机研究现状
目前,国内对毛豆机械化收获的研究主要有小型青毛豆收获机[6-8]、毛豆联合收割机[9-11]和青毛豆脱粒机[12、13]等,而毛豆采收的执行机构多采用脱粒滚筒式。然而对采收机构的收获效率、破损率、能耗等相关性能参数方面的研究还比较少。目前,在国内市场上销售的主要有南通市春风农业机械制造有限公司生产的祥明毛豆收割机和山东巨明机械有限公司研制的多功能自走式大豆联合收获机,同时已有多项台式青毛豆脱粒机的专利和相关产品。
2010年山东巨明机械有限公司研制了多功能自走式大豆联合收获机,该收获机也可用于毛豆的收获[9]。该联合收获机主要由挠性割台、链式刮板输送器、脱粒清洗总成、豆杆豆皮箱、粮箱和动力驱动底盘组成,如图2所示。在进行收获作业时,收获机放下挠性收割台,机器边行走边收获。毛豆茎杆由动刀从根部切断,由割台搅动龙推到刮板升运器入口,在其作用下向后输送到脱粒机室,经切流滚筒和轴流滚筒的共同作用,豆粒从茎杆上分离,连同豆皮一起从四板筛间隙进入清选室,与收获大豆不同的是在进行毛豆的收获作业时无需将豆粒从豆荚中分离出来,在该专利说明书中并未对切割和脱荚装置进行说明。
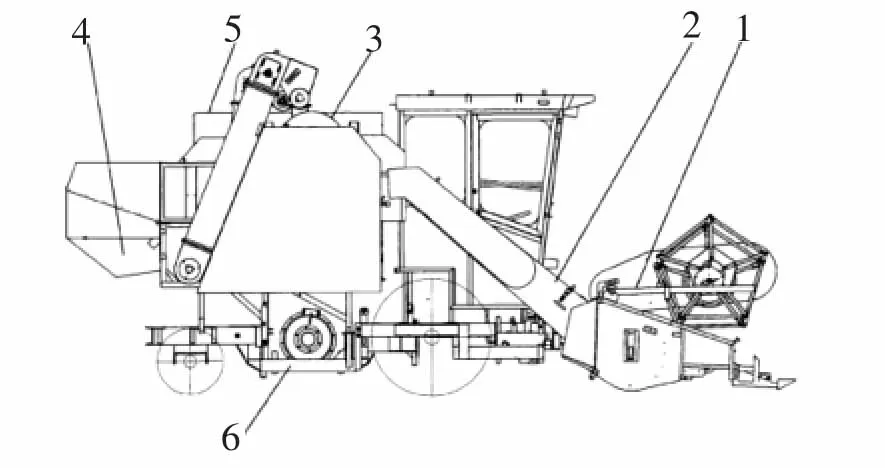
图2 多功能自走式大豆联合收获机
南通市春风农业机械制造有限公司研制的毛豆联合收割机如图3所示。该收割机适用于在平原地带进行大面积的收获作业。
2010年武汉市黄陂区石门群山科研所研制了一种摘毛豆机[7],如图 4 所示。
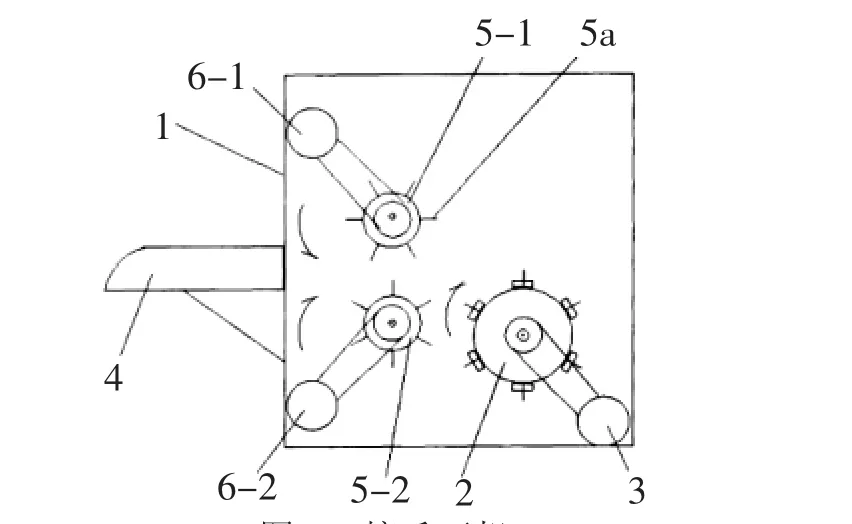
图4 摘毛豆机
该收获机包括机架、安装在机架上的转动部分及其驱动部分,其转动部分是摘豆辊或摘豆带,摘豆辊是在传动辊上安装4~8排摘豆刷构成的,摘豆带是在水平前后平行放置的两个传动辊上安装传动带,传动带上安装4~8排摘豆刷。传动辊的转速为400~600 r/min,夹持辊的转速为 150~250 r/min。
2012年华中农业大学研制了一种青大豆脱荚分离机构[12]。该机构采用夹持喂入辊筒组合和豆荚剥离辊筒组合为主要工作部件,工作原理与前述摘毛豆机基本相同。不同的是该机构可以通过夹持喂入辊压力调节弹簧与豆荚剥离辊压力调节弹簧,使夹持喂入辊筒组合与豆荚剥离辊筒组合的工作间隙随着青大豆茎秆喂入量的变化不断进行调节,能将青大豆荚与茎秆有效分离,提高了工作效率和作业质量,减少了分离后的青大豆荚造成损坏。
2014年河南农业大学王显锋对自走式菜用大豆摘荚机关键部件进行了设计研究[14],该研究从菜用大豆的种植模式、植株性状和豆荚性状着手,参考线辣椒采摘装置的采摘机理,设计了慢速夹持式采摘机构,主要由弹齿、摘荚滚筒、摘荚带和张紧滚筒组成,利用采摘带上和采摘滚筒上的摘荚齿之间的配合夹紧将豆荚摘下,利用采摘带将采摘的豆荚输送到一级传送带上。
2015年南通市农机化技术推广中心研制了4LDZ-48型青毛豆联合收获机[10],采用横向刺式和竖向辊式组合采摘技术,青毛豆联合收获机主要性能参数为:损失率4%、清洁度98%、破碎率2%、作业效率0.067 hm2/h。
3 青毛豆收获执行部件的研究
由于毛豆的收获原理与辣椒等农作物的收获具有一定的相似性,因此可以借鉴相关的研究与设计将其应用到毛豆收获机中[14]。例如国内新疆石河子大学和新疆农业大学都对脱粒滚筒的结构设计进行了相关的研究[15]。新疆农业大学和新疆机械设计研究院有限公司对辣椒收获机弹齿式采摘台进行了设计与研究,设计的弹齿采用不锈钢弹簧钢丝OCr18Ni9环绕而成,钢丝直径为6 mm端部有16~20度倾角,具有采摘、抛送、防止采摘物脱落的特点[16]。该采摘装置主要由弹齿、滚筒、侧板、护板、机架等部件组成。由于对辣椒收获机脱粒滚筒的弹齿进行设计与分析,其结构尺寸和参数并不适用于毛豆的收获,但是在脱粒滚筒上安装弹齿来对作物进行收获以提高采摘率与减少破损率,这一设计思路同样可应用于毛豆收获执行机构的设计中。
4 总结和展望
国外对毛豆的收获多采用直接从植株上收获豆荚的方式。这种收获方式有利于提高收获效率、减少能耗,更加有利于减少制造单一收获机的生产成本,提高农业机械的利用率和普及率。但是并未检索到他们对收获豆荚后的毛豆植株进行处理的相关研究文献,国内的联合收割机也同样存在这样的问题。而且大型的毛豆联合收割机适用于北方大面积种植且地势平坦的毛豆收获,对于南方种植面积小且种植分散的毛豆收获有着其很大的弊端。而目前国内研制的青毛豆脱粒机需要先将毛豆收割再进行脱粒,收获步骤繁琐,收获效率低,在搬运过程中造成豆荚损失。
因此为实现毛豆的机械化收获,应着重考虑以下几个方面的问题:
(1)研制悬挂式的毛豆收获机。结合国内外的收获方式,重点对旋转轴式和滚筒式进行比较,设计一种可悬挂于拖拉机前端的毛豆收获机。
(2)考虑对收获豆荚后的毛豆植株进行处理。参考现有对毛豆茎杆的利用方式,可在拖拉机后端底部安装悬挂犁或切割台。
(3)研究毛豆茎杆的机械特性。为实现毛豆的机械化采摘,应先研究毛豆植株性状及材料物理机械性能。应重点研究对毛豆的株高、茎粗、主茎节数、单株荚数。将毛豆茎杆视为一种材料研究其弹性模型、泊松比和密度。
(4)使用机械收获的毛豆应该符合出口菜用大豆国家标准。出口标准中对毛豆豆荚的长度、宽度和机械损伤都作了相关的规定。因此实现毛豆的机械化收获应研究如何减少青豆荚的机械损伤。
