基于PD控制器和牛顿预测器的等效前馈复合控制技术
2018-09-19李海鹏张永辉
李海鹏,张永辉,江 雷
(中国人民解放军92941部队,辽宁葫芦岛 125000)
0 引言
在无线电遥测系统中,伺服系统的主要作用是当目标进入天线扫描范围内以后,自动捕获目标,并以一定的跟踪精度连续跟踪目标,使目标始终处于天线主波束的中心线附近,保证天线以最大接收增益接收遥测信号,遥测系统获得可靠的遥测数据信息[1]。伺服系统是无线电测控通信设备的重要组成部分,可分为方位支路和俯仰支路,其性能的好坏将直接影响系统的跟踪性能和跟踪精度,随着遥测技术的不断发展,对伺服系统的稳态精度和响应速度有了更高的要求,目前常用的自跟踪天线伺服系统均采用传统位置环、速度环和电流环三闭环PID控制,本文在此基础上,以天线实时角位置和角误差信息作为输入构造PD控制器估计目标角速度,利用牛顿预测器对估计目标角速度进行一步超前预测,将超前预测的估计角速度馈入速度环路,实现基于目标角速度预测的等效前馈复合控制。
1 伺服系统结构
伺服系统是无线电遥测通信设备的重要组成部分如图1所示,可分为方位支路和俯仰支路,主要包括天线控制器、天线驱动单元、俯仰直流电机测速机组件、方位直流电机测速机组件、俯仰传动机构、方位传动机构、俯仰旋转变压器、方位旋转变压器、天线座,方位和俯仰传动机构分别采用谐波减速器和末级齿轮副结构。
工作时,通过天线控制器的人机交互界面显可以人工实时切换伺服系统方位轴/俯仰轴工作模式并设置伺服系统方位轴/俯仰轴角位置指令,自跟踪天线伺服系统的天线控制器中完成两种闭环控制方式:位置环路控制和跟踪环路控制。

图1 自跟踪天线伺服系统结构图
在位置环路控制模式下,天线控制器读取天线方位轴/俯仰轴实时角位置,并根据人机交互界面中设置的天线方位轴/俯仰轴工作模式和天线方位轴/俯仰轴角位置指令在天线控制器中完成方位轴/俯仰轴位置环路闭环控制,输出方位轴/俯仰轴速度环路控制指令至天线驱动单元,在天线驱动单元中完成方位轴速度环路、方位轴电流环路闭环和俯仰轴速度环路、俯仰轴电流环路闭环,控制方位轴/俯仰轴电机驱动天线转动至方位轴/俯仰轴指令角位置。
在跟踪环路模式下,天线控制器读取接收机输出的能够反映目标相对于天线波束中心位置的信息:锁定信号、AGC电压、方位角误差和俯仰角误差,根据锁定信号和AGC信号判断方位/俯仰角误差是否有效,利用有效的方位/俯仰角误差信息完成方位轴跟踪环路、速度环路、电流环路闭环和俯仰轴跟踪环路、速度环路、电流环路闭环,驱动天线对准目标。
天线控制器的人机交互界面能够显示天线伺服系统方位/俯仰实时角位置、天线驱动单元状态、天线控制器状态等信息。
2 天线伺服系统控制
经典控制理论中,闭环反馈控制通过对偏差的处理构成闭环,改善系统的性能,从而得到广泛应用。控制过程中在不影响原系统稳定性的前提下为了消除滞后误差,提高跟踪精度,通常加入前馈控制[2],前馈控制是一种比较特殊的控制方式,直接作用于系统输入端,在控制系统中,同时使用前馈控制和反馈控制的方法称为复合控制。在复合控制系统中,因其前馈控制量对闭环控制系统的输入具有预见性,在闭环控制系统输入量和输出量形成偏差之前产生纠正偏离的控制作用,可以在不影响闭环控制系统稳定性的前提下,提高原闭环控制系统的响应速度和动态误差精度即提高闭环控制系统对原输入指令控制的跟踪精度。当前馈控制器使系统误差为零时,即可实现对系统输入量的无误差跟踪,前馈控制满足上述条件时为误差全补偿,而实际控制系统中,由于不能完全准确的确定闭环系统环路各部分传递函数,通过前馈控制器的设计实现完全补偿是很难实现的,一般只能做部分补偿。
在自跟踪天线伺服系统中,方位和俯仰支路分别采用位置环、速度环、电流环三环路闭环控制方式,可在速度闭环控制环路的输入端加入基于目标角速度的前馈控制器,实现自跟踪天线伺服系统前馈复合控制。
由于无线电遥测系统只能提供目标与天线波束中心之间的偏差,即方位、俯仰角误差,而无法给出目标的空间直角坐标信息,也就无法得到目标在直角坐标系内的实际运动速度,故直角坐标系中的复合控制无法实现。一种有效的解决方法是通过将天线伺服系统的角位置与接收机角误差相加得到目标的在方位和俯仰坐标系下的空间角位置,求得目标的角速度在速度闭环环路中作前馈控制,实现天线伺服系统等效复合控制[3]。
3 基于PD控制器和牛顿预测器的等效前馈复合控制
由于通过伺服系统的角位置与接收机角误差合成的目标空间角位置信息附有来自角位置传感器和接收机的随机干扰,直接用微分求目标合成角位置信号导数获得的角速度信息中干扰将更加严重,一种有效的方法是采用滤波估计技术对合成后的角位置信息进行滤波并估计出目标的角速度。
3.1 PD控制器
利用PD控制器估计目标角速度,PD控制器在低速应用场合估计目标角速度有优异的效果[4-5],离散化的PD控制器如下:

其中:θ为PD控制器输入角位置,θe为PD控制器估计角位置,ωe为PD控制器估计角速度,ae为PD控制器估计角加速度,K1、K2为PD控制器参数,K1=,K2=2ξωb,ωb为PD控制器带宽,ξ为PD控制器阻尼系数。上述的角速度估计器设计时要考虑的两个主要问题是阻尼系数ξ和带宽ωb,ξ通常取0.707,即临界阻尼状态,因为此时响应最为快速,且超调量为零。ωb的取值通常根据伺服系统的具体情况而定,为了减小估计误差ωb不能选的过大,本文中取ωb=50。
3.2 牛顿预测器
由于采用前馈复合控制算法,角速度估计过程中的滞后对系统稳定性和跟踪精度的影响比普通跟踪方式更为严重,针对估计角速度进行超前预测可解决这一问题。牛顿预测是一种基于多项式原理的预测方法,假定被估计的角速度信号相对于时间按照多项式规律变化,以此为基础用牛顿预测方法对角速度值进行n步超前预测,本文利用牛顿预测器针对PD控制器估计的目标角速度信息进行超前预测,进一步增强PD控制器的预测估计能力,减小相位滞后[6-7]。二阶一步牛顿预测器只需要当前时刻角速度状态估计值、前一周期时刻角速度状态预测值以及之前两周期时刻角速度状态预测值在内的3个状态,即可获得当前时刻角速度状态预测值,其所包含的时间窗很小,可以在比较大的频率范围内满足二阶多项式的假设要求[8],且只需要一次乘法两次加法运算,算法实现简单易行,离散化的牛顿预测器如下:

3.3 基于角速度预测的等效前馈复合控制
在传感器量测过程中,由于受环境杂波、传感器工作状态等因素影响,量测数据中经常存在一些野值点。天线伺服控制系统前馈复合控制算法中,如果不对这些合成目标角位置野值点进行处理,而直接利用合成目标角位置的野值点通过PD控制器估计目标角速度信息,那么估计精度在野值出现时将产生突变,影响PD控制器的稳定性,本文采用3σ准则[9]判断该量测值是否为野值点,对判断为野值的量测值进行剔除。
如图2所示,在伺服系统天线控制器中进行跟踪环路闭环控制算法时,采样周期T=0.05 s,天线控制器的处理器模块在每一个伺服采样周期利用接收机角误差信号、天线实时角位置信号作为PD控制器输入量测信息,估计目标角位置θe(k+1)和角速度ωe(k+1),根据3σ准则判断野值并剔除,利用ωe(k+1)作为牛顿预测器的输入量对目标角速度进行一步超前预测得到预测角速度珚ωe(k+1)完成前馈复合控制算法。
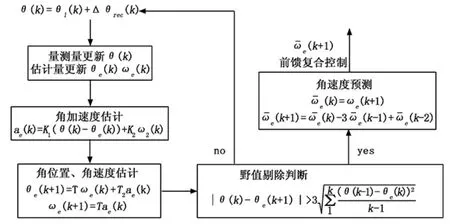
图2 角速度预测流程图
以方位支路为例分析前馈复合控制算法控制框图,图3所示为自跟踪天线伺服系统方位支路的位置环、速度环、电流环三闭环控制及前馈复合控制算法框图。图中,θref为角位置控制指令,Gp(s)、Gv(s)、Gi(s)分别为位置环、速度环、电流环PID传递函数,KPWM为PWM驱动器放大倍数,La、Ra为电机电枢回路总电感和总电阻,Km为电机力矩系数,Jm为电机转动惯量,N为传动机构减速比,Kg为谐波减速器扭转刚度,Jl为负载转动惯量,θl为负载端角位置,Δθrec为接收机输出的角误差信息,为估计角速度,Gf(s)为前馈复合控制器传递函数,GPD(s)为PD控制器传递函数,GNp(s)为牛顿预测器传递函数。
4 系统测试

图3 自跟踪天线伺服系统方位支路闭环控制框图
无线电伺服系统中,指标测试内容包括动态性能指标和静态性能指标,其动态性能指标的考核内容主要包括:调节时间、超调量及跟踪精度,静态性能指标的考核内容主要为稳态误差,调节时间、超调量及稳态误差可通过阶跃性能测试获得,同时为确保对无线电遥测伺服系统系指标考核的覆盖性,阶跃性能测试分为大角阶跃测试和小角度阶跃测试,通过大角度阶跃测试反映无线电遥测系统最大角速度、最大角加速度、调节时间及稳态误差性能指标,通过小角度阶跃测试反映无线电遥测伺服系统调节时间和稳态误差性能指标。跟踪精度指标可通过正弦测试获得,通过正弦测试放映无线电伺服系统保精度最大角速度、保精度最大角加速度及跟踪精度性能指标。
4.1 角度阶跃测试
阶跃测试主要是测定系统的动态性能。通常认为,在阶跃信号输入下对系统的要求最高。当系统输入阶跃信号时,如果系统能够良好的运行,即系统的各项动态指标满足要求。为了全面测试天线伺服系统的特性,本测试工作中给定了大角度阶跃测试、小角度阶跃测试,另外由于天线方位轴和俯仰轴相互独立,系统调试中分别对方位和俯仰做测试,测试结果如图4~5所示。
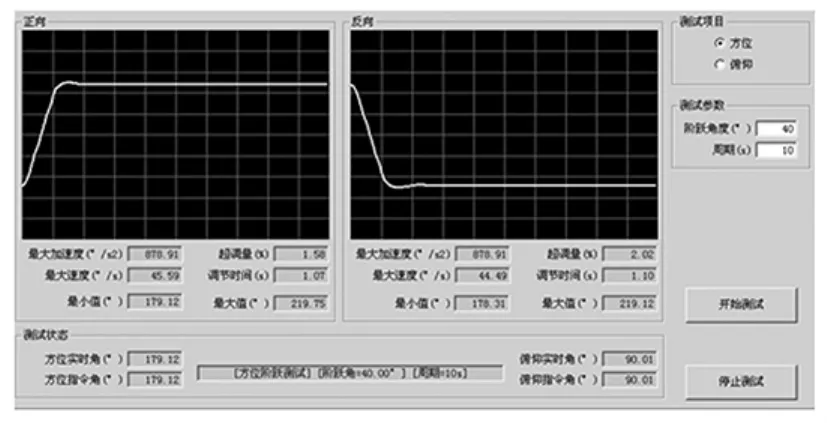
图4 方位大角度阶跃测试

图5 俯仰大角度阶跃测试
无线电遥测伺服系统自跟踪模式下为跟踪环路闭环控制,本文通过对静态信标机跟踪模拟自跟踪模式阶跃测试,对比传统PID控制与等效前馈复合控制效果。具体方法是:①确定天线对静态信标机跟踪零点角度,②通过天线定位模式将天线实时角相对于跟踪零点角度拉偏5°,③在自跟踪模式天线自动跟踪至跟踪零点角度,④通过存盘数据分析调节时间、超调量。现以方位轴10次测量结果为例对比传统PID控制方法和加入等效前馈复合控制方法后调节时间、超调量性能指标,如表1~表2所示。

表1 传统PID控制无线电伺服系统方位跟踪性能

表2 加入等效前馈复合控制方法后无线电伺服系统方位跟踪性能
根据测试试验结果,采用传统PID控制无线电伺服系统方位跟踪平均调节时间为1.21 s,加入等效前馈复合控制方法后无线电伺服系统方位跟踪平均调节时间为1.092 s,调节时间减少9.75%。
4.2 正弦测试
通过正弦测试,完成对保精度角速度、角加速度和跟踪精度指标的测试。在测试结果中,不能直接看到保精度速度、加速度的测试结果。通过保精度角速度、角加速度计算得到。以方位为例,方位正弦测试函数:

将正弦函数求一阶导数和二阶导数,得到速度和加速度函数如下:

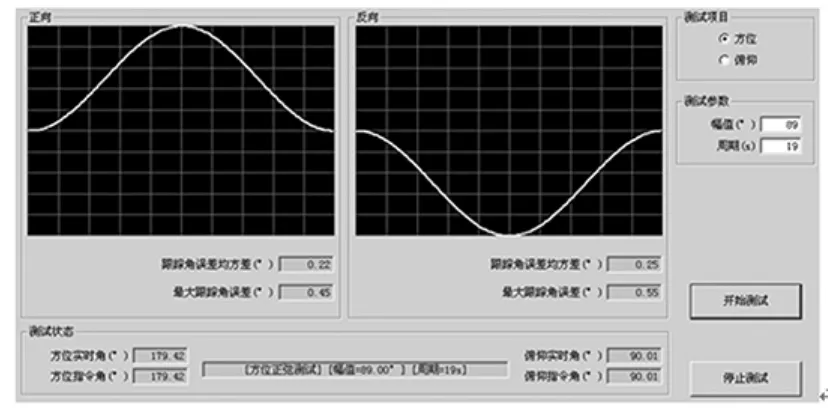
图6 方位正弦测试

表3 传统PID控制无线电伺服系统方位正弦性能

图7 俯仰正弦测试

表4 加入等效前馈复合控制方法后无线电伺服系统方位正弦性能
根据测试试验结果,采用传统PID控制无线电伺服系统方位正弦跟踪精度为0.273°,加入等效前馈复合控制方法后无线电伺服系统方位正弦跟踪精度为0.249°,跟踪精度提高8.8%。
测试实验结果表明利用PD控制器和牛顿预测器实现的等效前馈复合控制能够快速、稳定的实现对目标的跟踪。
5 结束语
本文提出了一种等效前馈复合控制方法应用于无线电遥测伺服系统中,利用天线实时角位置和接收机有效角度差,通过PD控制器估计目标角速度并进行野值剔除,利用牛顿预测器对估计目标角速度进行一步超前预测,实现了等效前馈复合控制算法,有效提高了无线电遥测伺服系统稳定跟踪性能。该控制算法及设计思路同样适用于雷达、光学等伺服控制领域,具有很好的工程实用价值。
