基于模糊避障算法的履带式搬运机器人的设计
2018-09-19蔡青松杜康熙谢自强王肖锋
蔡青松,吴 强,杜康熙,谢自强,王肖锋
(1.天津市先进机电系统设计与智能控制重点实验室,天津 300384;2.天津理工大学机电工程国家级实验教学示范中心,天津 300384)
0 引言
近年来小型搬运机器人及其相关技术已成为机器人领域的研究热点。它能够进入恶劣环境中,广泛应用于灾后救援、航天应用及环境科考等作业中。尤其是在快递业的分拣及搬运中,小型搬运机器人正受到越来越多的青睐。
搬运机器人要实现在未知环境中作业,需具备自主行驶和自动避障功能,还需可靠的搬运执行机构和环境感知能力。由于超声波传感器方向性好、结构简单、探测距离远且成本低廉,因此广泛应用于机器人环境探测中。另外,对于搬运机器人来说,合适的机器人驱动结构也是更好的完成工作任务的重要保证,履带式良好的行进能力和环境适应能力能让搬运机器人更好的完成搬运任务。
近些年,许多学者对履带式机器人进行了避障算法研究。王随平[1]等人针对深海活动的履带机器人提出的改进型人工势场法进行避障控制,对声呐采集到的环境信息是采用D-S理论推算出障碍物准确位置再根据改进型的人工势场法进行方向控制从而实现避障;王晓东[2]等人在差动式驱动结构履带机器人上引入了模糊控制算法,使用定性的规则来进行避障控制;王随平[3]等人对深海履带机器人提出了模糊与遗传算法相结合的方法建立了局部避障规划;刘同林[4]等人提出了协同转向方法,用于履带式机器人避障;杨小菊[5]等人针对移动机器人在未知环境中的不确定性,利用Matlab构建了多传感器仿真试验移动平台,在Simulink中搭建移动机器人运动学模型,利用多传感器采集环境中的障碍物信息与目标物的方位角,设计了具有避障功能的模糊控制算法。
本文设计了一种能够自动搬运的小型履带式机器人,并提出了一种模糊算法来实现机器人自动避障。该算法无需对环境物体建立数学模型,只需对输入量即机器人与障碍物之间的距离进行模糊化,利用语言变量表达的定性的模糊规则来实现避障控制。针对驱动履带轮的直流电机建立了数学模型,并利用积分分离PID算法进行仿真,实验验证了直流电机的性能可靠。
1 系统总体设计
机器人车体选用的是双履带式小车。后方履带轮为主动轮,由两个直流电机驱动,前方履带轮为随动轮。前端立有支撑架,上下各有两个舵机与铁链连接,下方舵机用于控制叉车的升降,实现货物的搬运卸载。前方及左右方各安有一个超声波传感器。机器人系统参数如表1所示。

表1 机器人系统参数
系统选用意法半导体公司设计的ARM架构处理器STM32F103芯片,系统功能框图如图1,机器人实物如图2所示。
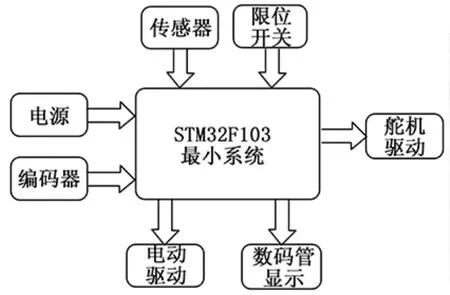
图1 系统框图
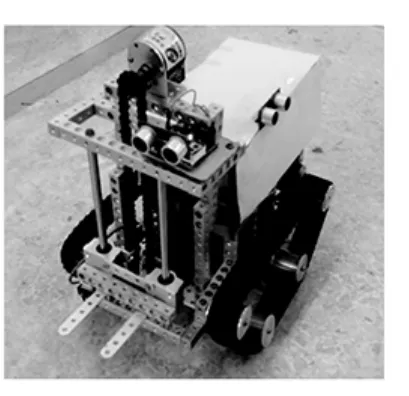
图2 机器人实物图
系统主要由传感器模块、电机驱动模块、舵机驱动模块、电源模块及显示模块构成。电源模块将12 V电源分别转换成系统所需的3.3 V、5 V和12 V,用于给单片机和系统外设供电。超声波探测机器人与障碍物之间的距离并返回模拟信号,经AD转换后送给单片机,经处理后传给数码管显示距离信息,并通过控制器输出端口驱动舵机和直流电机工作。
2 结构设计
机器人选用型号为TQD-08-5013的实验室机器人小车,机器人采用模块化拼装,材料选用轻质铝合金材质。机器人驱动方式为双履带式,其布局结构如图3所示。
2.1 底盘机构
以方形铁板为主,上下共两层,通过连接杆件形成上下两层主体结构,以便安装履带式轮组。上层主要放置系统的控制板和电机驱动芯片,下层放置电池盒和驱动叉车的电机模块。下层板前端安装突出结构,用于安装前方超声波传感器模块。
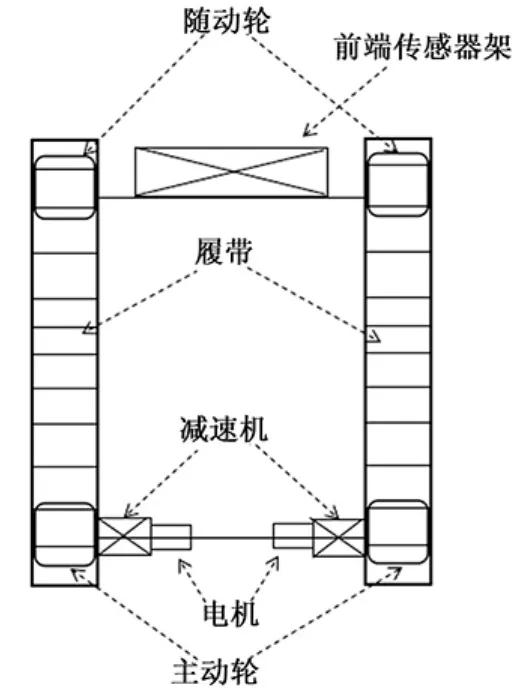
图3 机器人俯视图
2.2 履带轮机构
车体左右各有一履带轮组,套有两条履带。每组4个行动轮,分为一个主动轮、一个随动轮和两个支撑轮。主动轮在车体后方,由大功率直流电机驱动,其表面有凹凸结构,可以带动履带转动。
2.3 叉车机构
叉车机构由若干杆件连接组成立式桅杆结构,用于固定前方两个光滑滑杆。桅杆结构上下各装有一个舵机,下方电机为驱动电机,上方为随动电机。在两电机输出轴上套有链条,在链条上安装铁叉,用来搬运货物。最下端安装限位开关,用来检测叉车的位置。
3 硬件设计
履带机器人硬件系统主要有单片机最小系统、电源模块、电机控制模块、传感器模块及叉车搬运模块。传感器模块主要负责环境信息采集;叉车模块主要负责搬运货物;履带模块主要由两个直流电机驱动履带转动实现机器人移动。
3.1 传感器模块
超声波传感器具有频次高、波长短及方向性好等特点,因此本设计选用型号为HC-SR04的超声波传感器,其主要由发送部分、接收部分、控制部分和电源构成。HC-SR04型号超声波传感器电源为5 V,静态电流为2 mA,感应角度左右各15°,探测距离为2~450 cm,精度为0.2 cm。
3.2 舵机驱动模块
舵机用来带动车叉上下运动实现搬运货物,选用TA8428K芯片驱动,采用脉宽调制 (PWM)方法控制,通过改变脉冲的宽度或占空比从而实现调压。舵机的输入信号与输出的角度之间的线性度很好。本叉车采用型号为S135的舵机,其速度为0.15秒/60度,扭力为1.9 kg·cm,驱动电压12 V,可从电源模块直接引出12 V独立给舵机供电。
3.3 电机驱动模块
机器人两侧履带轮各配有一个直流电机,由双端输出的L298N芯片驱动,其采用双H半桥式电路,输入为非反相式,每个H桥可以提供2 A的电流输出,峰值为3 A,电源电压为2.5~48 V,逻辑部分为5 V供电,工作温度为-25~130℃,图4为L298N驱动电机的电路图。
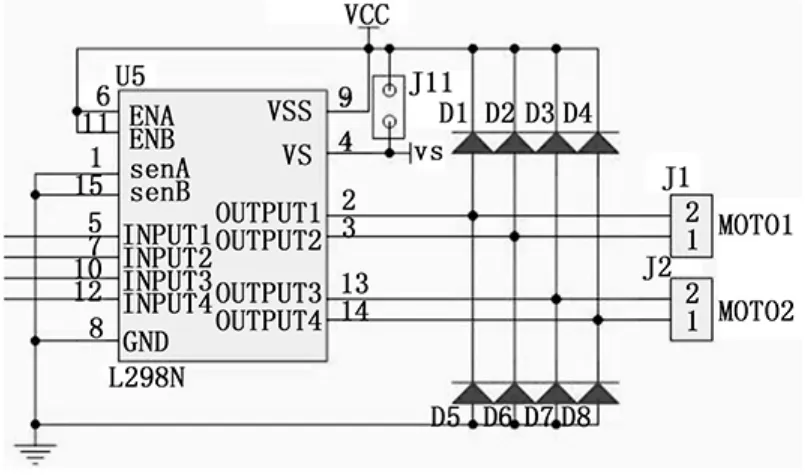
图4 电机驱动电路图
3.4 电源模块
电源模块采用12 V的电源盒供电。两个电机和舵机需要12 V电源供电,STM32F103C8T6芯片需3.3 V供电,超声波传感器、限位开关均需5 V供电,L298N逻辑电平4.5~46 V。由于系统需多种电压驱动,为降低成本简化电路,通过型号为HW-DY02的DC12V转5 V、3.3 V的转换模块引出各电压。转换模块采用两个AMS1117芯片,一个是AMS1117-5.0,输出 5 V电压;另一个是 AMS1117-3.3,输出3.3 V电压。图 5是 AMS1117-3.3芯片外围电路。AMS1117-5.0芯片电路与AMS1117-3.3的类似,这里不再展示其电路图。
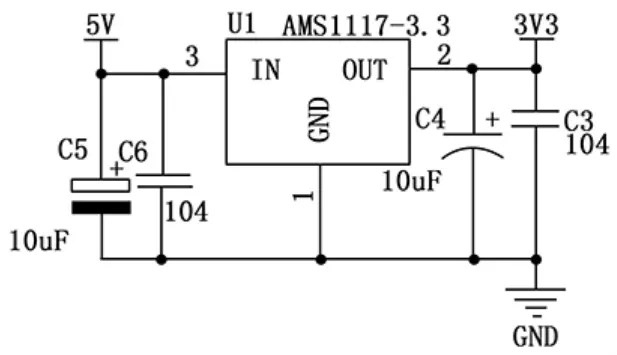
图5 AMS1117-3.3芯片外围电路
4 系统软件和算法设计
履带机器人系统的开发软件采用Keil uvision5。首先分别编写各个模块的程序,再将各个模块组合起来。单片机系统上电后对每个模块初始化,在主函数中执行主程序后等待中断,响应中断执行中断服务程序后退出中断。程序流程图如图6。
主函数主要是机器人行进函数和超声波扫描函数。当前方超声波传感器检测到有物体时,返回一个高电平给CPU,触发中断,此时查询限位开关信号端button=1是否成立,即叉斗是否在底端。若是,则遇到的是货物,CPU调用搬运程序进行搬货;若不是,则遇到的是障碍物,CPU调用避障程序,此时分别给左右超声波的控制端Trig发送高电平,若有返回信号触发定时器开始测距。测得的数据经CPU进行处理后,调用电机程序避障。
4.1 基于模糊控制的避障算法
模糊控制的基本思想是利用计算机来实现人的控制经验,而这些经验多是用语言表达的模糊性控制规则[6]。本文设计了一种基于模糊控制的避障算法,将传感器探测到的障碍物距离远近通过模糊化处理作为其危险程度指标,设计了一个三输入单输出模糊控制器。
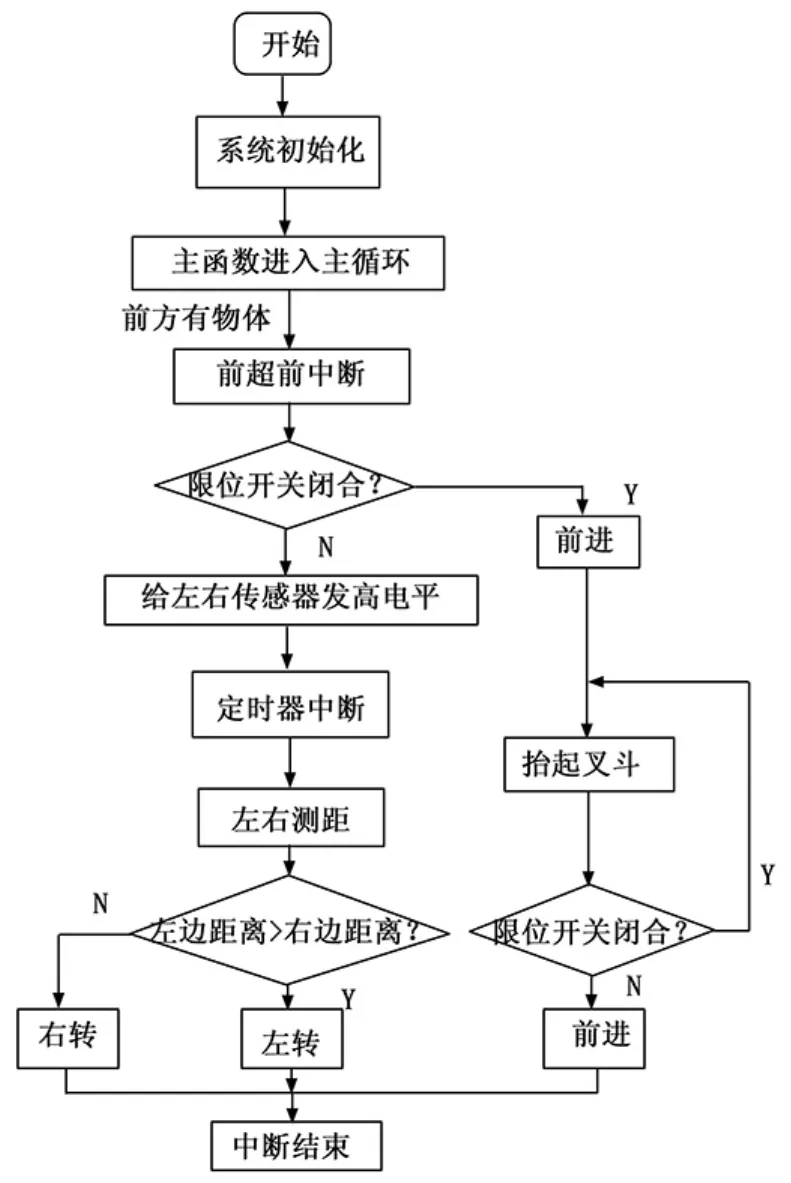
图6 程序流程图
4.1.1 控制器的输入与输出设计
由于传感器探测距离的限制、并且考虑到实际任务,将系统的阈值设为[5 cm,30 cm],机器人左、前、右3个方向的传感器探测到的障碍物距离分别用LD、FD、RD来表示,模糊距离变量的语言值为:很近 (C)、近 (N)、中(M)、远 (F)、很远 (VF)。由于高斯型函数曲线较为平滑,所以隶属度函数采用高斯函数,LD隶属度函数具体设计如图7,FD和RD与其类似不再展示。
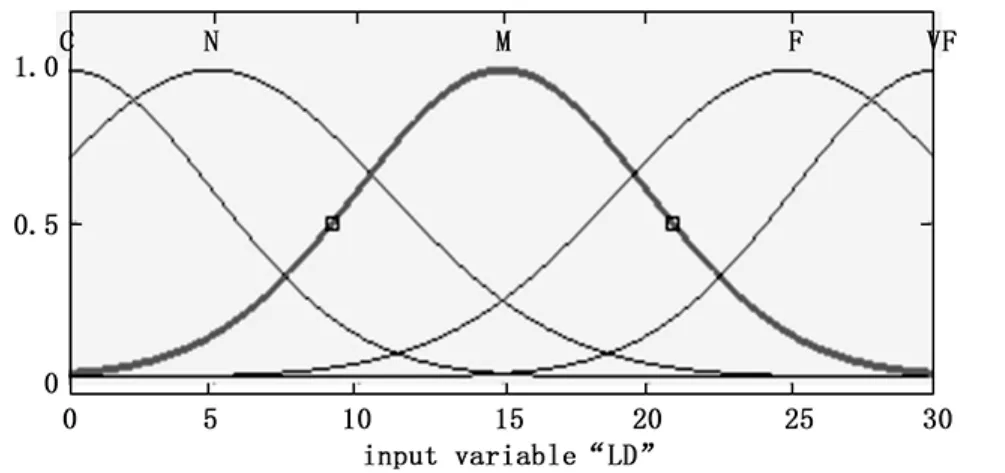
图7 LD隶属度函数
机器人本身有两个电机需要控制,为了简化系统,由两个电机的速度差来实现机器人的转弯角度Angle作为控制器的输出,范围为 [-15°,+15°],负数表示向左转,正数表示向右转,0代表直线行进,输出值的绝对值表示转角大小。模糊转角控制变量的语言值为:左大 (TTL)、左中(TL)、左小 (TSL)、零 (TC)、右小 (TSR)、右中(TR)、右大 (TTR),隶属度函数如图8。
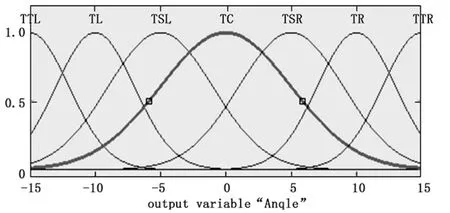
图8 Angle隶属度函数
4.1.2 建立模糊控制规则
根据Fuzzy Set理论,建立定性推理原则[7]。模糊推理规则采用Mamdani的max-min合成法,反模糊化采用面积中心法[8]。模糊规则采用 IF-THEN条件语言,针对避障环境设计了23条规则。模糊控制规则是输入距离信息与输出转角信息一种映射关系,本质上是一种反应式控制方法,具有普遍的适用性,不仅能够用于静态环境,还可用于实时动态的环境。
4.1.3 软件模拟仿真
首先在Matlab中设定机器人的起始位置为 (0,0)、目标位置 (10,10),障碍物分布如图13。机器人与目标物的角度为45°,在设定测距范围内,计算障碍物与机器人的角度并逐一与目标角度比较。当障碍物角度大于45°时,则认为障碍物在机器人的左方;等于45°则可以确定障碍物在机器人的前方;小于45°则认为障碍物在机器人的右方。将测得的障碍物距离和机器人与目标物体的角度信息送入模糊控制器。经过多次仿真,不断调整各个模块的参数,最后将数据整理得到机器人的避障仿真结果如图9所示。

图9 机器人仿真结果
由仿真结果可以看出,机器人基本能够沿着目标方向前进,并且能有效避开障碍物,尤其对矩形障碍物避障效果较好,说明该算法对避障的控制可行有效。但是对多个障碍物时的避障不是很好,如在前3个障碍物时机器人虽然对左方两个障碍物进行了避障但过于靠近右方的一个障碍物。
4.2 电机控制策略
履带轮由两个直流电机驱动,对电机转速的控制直接关系到机器人避障的准确性和可靠性。由实际运行情况看,履带轮往往不能按控制器输出量运行。分析了系统受到的扰动因素,如搬运过程中机器人移动、货物重量的变化以及舵机本身启停状态的变化导致系统受到的扰动,对直流电机引入了积分分离PID控制算法,修正电机转速。
4.2.1 建模
普通PID控制,当扰动幅度较大时,或者是给定值大幅度改变时,由于短时间内会产生很大偏差,加上系统有滞后,常会产生较大的偏差或出现饱和现象,往往会造成超调和长时间的振荡[9]。针对这些问题对电机控制采用了积分分离PID,即偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除净差,提高控制精度[10]。PID算法可表示为式 (1)。

式中,u(k)为控制器输出的控制量,本文选用电机的驱动电压作为控制量,u(k)即为电压值;e(k)为电机的转速误差;控制器参数Kp、Kd、Ki分别为比例、积分和微分系数,β为积分项的开关系数。
利用电枢电压平衡方程和转矩平衡方程,建立状态方程及传递函数关系。电枢电压平衡方程为:
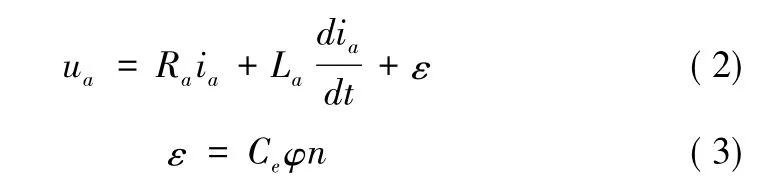
式中,ua为直流电机电枢电压,Ra、La分别为电枢电阻、电枢电感,ia为电枢电流,ε为电枢反电势,φ为每极磁通,n为转子转速,Ce为电势常数。
转矩平衡方程:
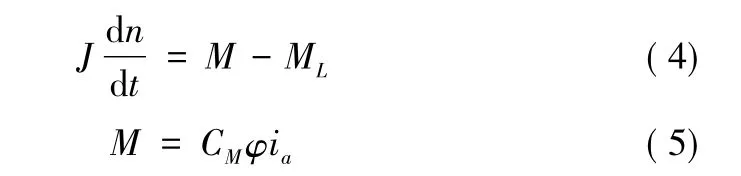
式中,J为转速惯量,M、ML为电磁转矩和负载转矩,CM为直流电机的转矩常数。
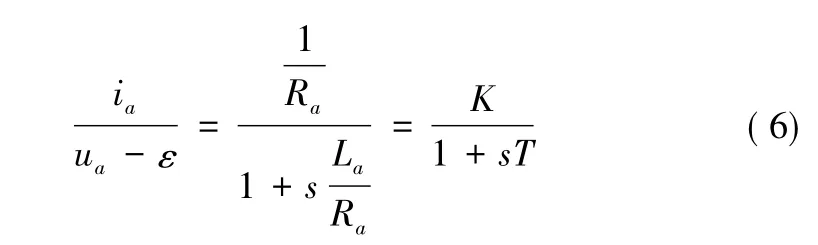
对式 (2)做拉氏变换可得电枢电流与电压之间的传递函数:
对式 (4)做拉氏变换可得转子转速与动态转矩(MML)之间的传递函数:

将式 (3)、(5)代入式 (6)得电磁转矩与电枢电压之间的传递函数:

由式 (7)、(8)建立精确数学模型,形成一个有反馈的闭环二阶控制系统,得转速与电枢电压的传递函数:
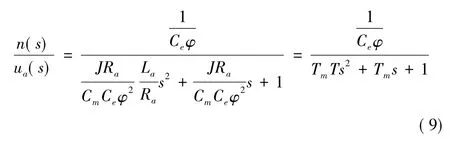
为机电时间常数。

即为S135直流有刷电机以电枢电压为输入,以转速为输出的传递函数。
4.2.2 运动仿真
基于MATLAB/Simulink对建立的直流电机闭环控制系统模型进行了仿真。普通PID控制器4个参数分别为Kp=5,Kd=20,Ki=0.08,积分分离PID控制器4个参数分别为Kp=10,Kd=0.2,Ki=0.01,仿真结果如图10所示。
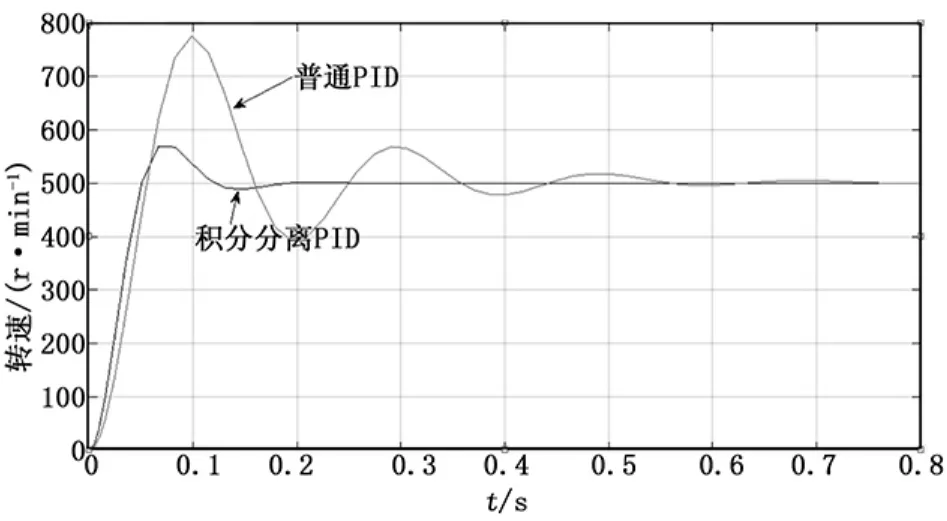
图10 PID仿真结果
仿真结果表明,在n=500 r/min的参考转速下,普通PID存在较大的超调量,并且会产生一定的振荡,调整时间延长。在实际控制过程中,对电机的响应速度影响较大,系统趋于稳定的时间增加,响应迟缓。采用积分分离PID控制,响应速度快且平稳,系统整体趋于稳定。在实际控制过程中,电机达到目标速度的时间短且过渡平稳,使得机器人避障的可靠性提高。
5 实验结果与分析
5.1 机器人避障实验
实验使用安装在前、左、右的3个方向的超声波传感器模块对机器人与障碍物间的距离进行测量,得出的距离信息经AD转换后送给单片机控制系统,计算处理后将控制信号发送给驱动履带轮的两个电机,
从而控制履带机器人行走及避障。由于条件和设备有限,已通过软件对模糊避障算法进行了仿真,不再进行实地测试,实验只针对如前进、转弯、后退、避障等性能以及积分分离PID对电机的控制进行验证。实验过程如图11中的 (a)、(b)、(c)、(d)、(e)、(f)、(g)、(h)。
5.2 实验结果分析
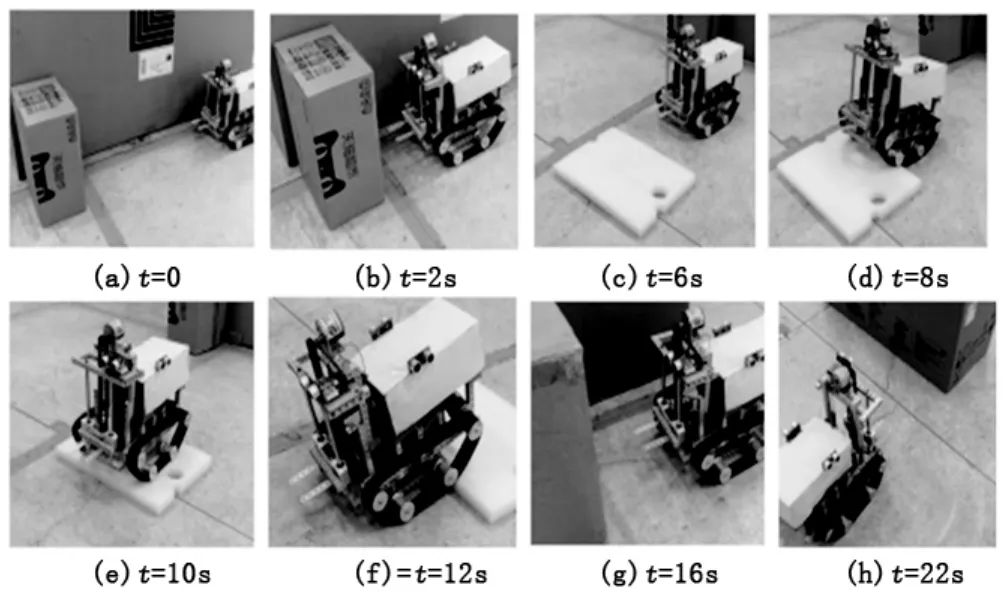
图11 智能机器人运行过程图
实验结果表明,履带机器人能利用多个超声波传感器测距,由单片机来控制舵机和电机分别实现叉车搬运及自动避障功能。在实验过程中,机器人运行平稳,并且搬运、避障时电机能够快速响应,说明采用积分分离PID控制算法的电机具有良好的可靠性。
6 结论
本文基于模糊避障算法实现机器人的避障任务,仿真结果表明,模糊控制算法解决非线性系统具有一定优势;积分分离PID算法提高了对电机的控制效果,从而提高了机器人避障的可靠性。实验表明,在简单的环境中,履带机器人可以灵活、准确避开障碍物,到达目标点,满足机器人避障要求。但由仿真以及实验结果可看出,当遇到不规则或障碍物与机器人正前方有一定角度时,探测不是很灵敏,甚至会撞上障碍物,导致机器人避障不理想。因此需进一步修正模糊算法模型,以及改进机器人硬件设计,如增加传感器数量、采用更大探测角的传感器,并设计上位机结合计算机进行实验,测试履带式搬运机器人整体的可靠性。
