变几何进气道吸气式高超声速飞行器控制系统设计*
2018-09-11苏沛华
苏沛华, 毛 奇
(天津大学 电气自动化与信息工程学院,天津 300072)
0 引 言
吸气式高超声速飞行器(airbreathing hypersonic vehicle,AHV)由于空间战略优势、全球可达性等,引起了国内外的广泛关注[1,2]。在控制领域,如比例—积分—微分(proportional integral differential,PID)算法[2]、自适应控制[3]、滑模控制[4]、模糊控制[6]等在高超声速飞行器的控制算法上有了广泛的应用。然而,传统的定几何进气道AHV(airbreathing hypersonic vehicle with fixed geometry inlet,AHV-FGI)是保证其在针设计点附近的性能,当运行马赫(March)数较低时,产生“溢流”现象,使得发动机性能下降。
近年来,变几何进气道(variable geometry inlet,VGI)的研究取得了一定的进展。其通过改变进气道的结构来提高飞行器的运行性能,X—43A使用了一种旋转唇罩式可移动唇罩[5],日本的Space and Astronautial Science 机构针对ATREX引擎提出了一种对称式VGI方案[6],美国学者提出了可调节中心锥式进气道以提高超冲压燃烧式发动机的非设计点性能[7]。尽管VGI的设计以及理论分析已经取得了一系列的研究成果,但对AHV-VGI的控制设计仍处于起步阶段。
法国ONERA机构提出了一种VGI即通过沿着来流方向平移唇罩,从而提高飞行器的性能。本文主要针对该方案在控制设计方面展开研究。建立AHV-VGI的纵向模型,将AHV-VGI由于气动力拟合引入的不确定性、由可移动唇罩引入的不确定性,以及其所受的外部扰动视为复合干扰,并使用模糊干扰观测器(fuzzy disturbance observer,FDO) 进行观测。并结合动态面控制(dynamic surface control,DSC)策略,实现了控制系统的设计。仿真结果表明AHV-VGI系统在控制方面更具优势。
1 AHV-VGI模型描述
1.1 可移动唇罩原理及数学模型
平移唇罩能够实现进气道最大气流捕获的基本原理如图1所示。当飞行器处于较低马赫状态时,若设有可移动唇罩且唇罩向前移动L1的距离,则可实现最大气流捕获。

图1 可移动唇罩原理
由图1可见,唇罩伸长距离L1为攻角α和激波角θs的函数,而激波角θs是飞行马赫数Ma与攻角α的函数。通过曲线拟合,结合文献[10],可得到唇罩伸长量的解析表达式为
(1)
1.2 高超声速飞行器数学模型
通用AHV刚性模型可以描述为
(2)
式中V,h,γ,θ,Q分别为飞行器的速度、高度、攻角、俯仰角和俯仰角速度;m,Iyy,gn分别为飞行器的质量、转动惯量和重力加速度;dV,dγ,dQ为未知外界干扰;L,D,T,M分别为升力、阻力、推力和俯仰力矩,且与唇罩伸长量有关。
将模型(2)转换为如下严反馈形式
(3)

T·sinα/(mV)-gn·cosγ/V,

φ)]/Iyy,
Ωi=Δgi·φ+Δfi+(fli+Δfli)·+di


2 控制系统设计
系统控制结构如图2所示。
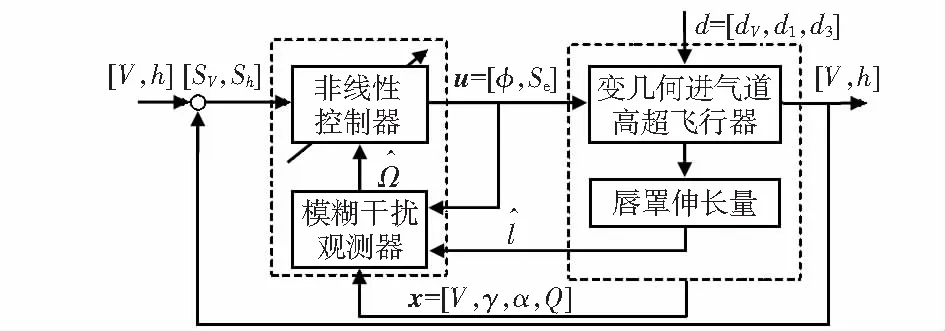
图2 控制系统结构
2.1 模糊干扰观测器设计
模糊系统的输出可表示为:y(x)=λTφ(x),x∈Rn和λ∈RN为参数向量,φ(x)为模糊基函数向量。由模型(3)设计FDO如下
(4)
式中zi(i=V,γ,Q)为观测器状态量,x=[V,γ,θ,Q],u=[φ,θ,Q,δe],uc=[φ,δe]。定义观测误差ζi=xi-zi。FDO的动力学方程表达如下
(5)

(6)
(7)
选择合适的参数σi和μi2,可使F为负,干扰观测误差一致有界。
2.2 控制律设计
定义速度误差面SV=V-Vd,并且使用FDO对复合干扰ΩV进行观测,则速度子系统的实际控制量设计为
(8)
式中kV为待设计正数。
由模型(3)可知,可以将高度指令hd转化为航迹角指令γd
(9)
式中kh>0为待设计正数。

(10)

(11)
定义误差面Sθ=θ-θd,则控制律设计为
(12)

(13)
定义误差面SQ=Q-Qd,使用FDO对ΩQ进行观测,设计其实际控制量δe为
(14)
式中kQ为待设计正数。
2.3 稳定性分析

选取Lyapunov函数W=WV+W1+W2+W3,其中
(15)
将WV求导,考虑自适应律(6),可得

≤-rVWV+mV
(16)

将W1求导,可得

≤-r1W1+m1+SγgγSθ
(17)

(18)
类似地,将W2和W3求导可得
(19)
(20)

(21)
3 仿真验证
初始速度取V=7 Ma,高度取h=75 000 ft(1 ft=0.304 8 m),速度和高度参考信号由阻尼为0.9、自然频率为0.1 rad/s的二阶参考模型给出。
控制器参数选取为kV=0.5,kh=1.2,kγ=5,kθ=0.2,kQ=1.3,η1=0.1,η2=0.1,μV1=μV2=1,μγ1=3,μγ2=2,μQ1=1.2,μQ2=1.5 。如图3所示。
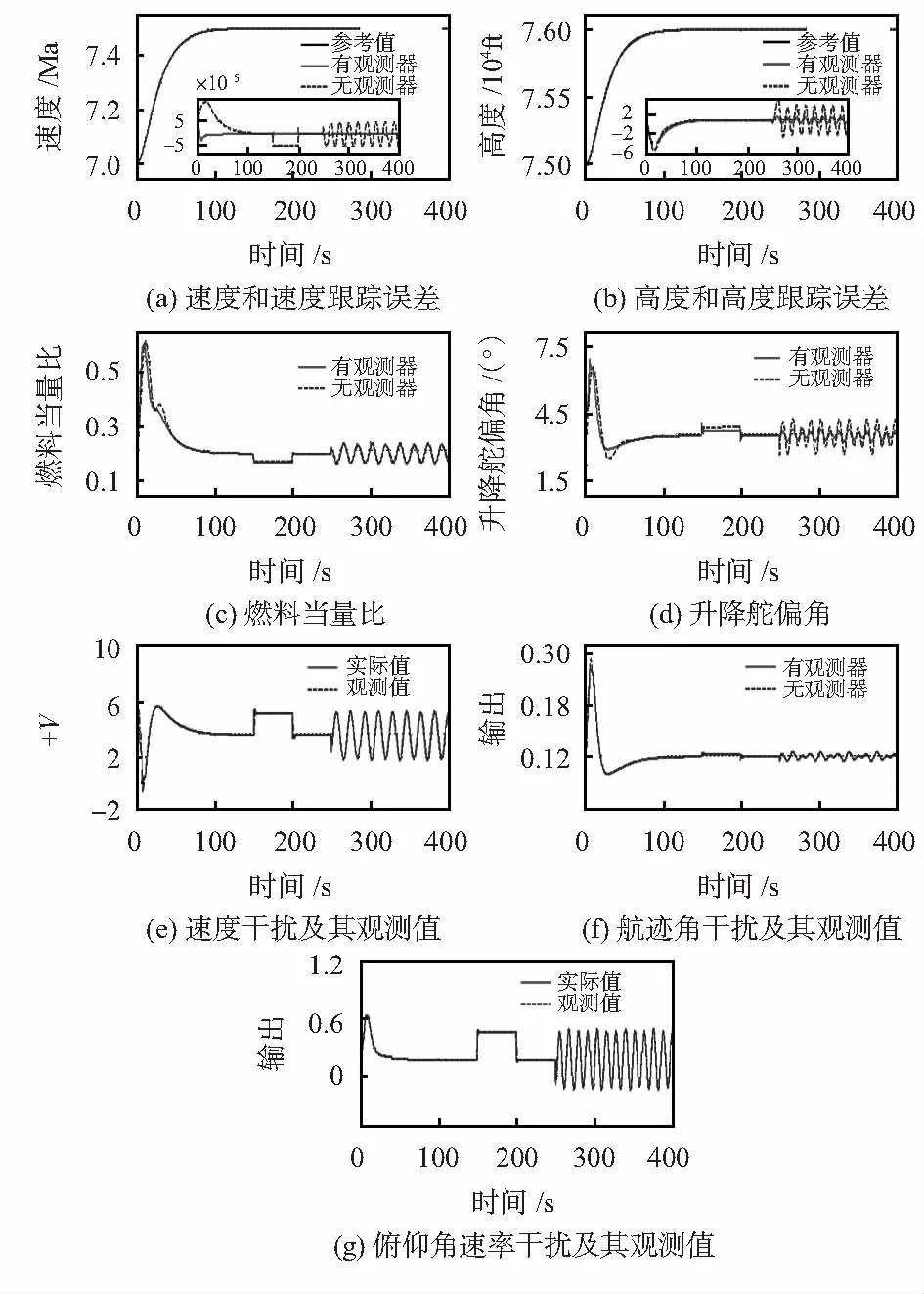
图3 存在复合干扰时系统的仿真结果
情况1系统给定的参考指令为Vd=7.5 Ma。hd=76 000 ft。在150 s 仿真结果充分表明,FDO能够对AHV-VGI系统中的复合扰动进行观测,并在控制率中进行补偿,因此可以获得更高的速度和高度跟踪精度。 情况2参考指令为Vd=9 Ma,hd=76 000 ft。 图4给出了AHV-VGI与AHV-FGI对给定指令的跟踪结果。该指令的速度、加速度较大,在加速阶段,需要提供较大的推力使飞行器获得足够的加速度,因此,需要输入较大的燃油比。AHV-VGI能够通过改变可移动唇罩的伸长量实现最大气流捕获,从而以较小的燃油比提供所需的推力。AHV-FGI在加速阶段因燃油比过大而使执行机构饱和(图4(b)),影响飞行器推力的获得(图4(c)),从而影响AHV对给定指令的跟踪精度(图4(a))。因此,可移动唇罩式VGI能够以较小代价,在很大程度上提高飞行器的控制性能,且能够节省AHV燃料,对于运行周期较长的AHV具有重要的战略意义。 图4 AHV-VGI与AHV-FGI仿真结果 对AHV-VGI气动力进行了拟合,建立其纵向模型。并针对AHV-FGI模型中存在的由唇罩引入的不确定性、气动力拟合误差以及外部扰动,设计了基于模糊观测器的动态面控制策略,根据Lyapunov理论对系统的性能进行了分析。最后通过仿真实验,验证了该控制方案能够克服AHV-FGI飞行中存在的复合干扰问题,实现有效控制,说明可移动唇罩式AHV-VGI在控制性能方面的优势。
4 结 论
