基于DSP的改进扰动观察法光伏MPPT实现*
2018-09-11吴中山
吴中山
(南京理工大学 自动化学院,江苏 南京 210094)
0 引 言
光伏电池在应用中的转换效率较低且价格昂贵,目前应用较普遍的光伏电池转换效率约为10 %~20 %[1]。如果考虑后级逆变器转换效率,那么整个光伏系统的利用效率将会更低。因此,如何充分利用光伏电池,成为了光伏的最大功率点跟踪(maximum power point tracking,MPPT)解决的问题。国内外关于光伏MPPT的研究较多:研究光伏电池参数估计、研究扰动观察法的改进、结合智能算法的MPPT等,但大多都停留在仿真阶段,实现并实验验证并不多。
由于常规扰动观察(perturbation and observation,P&O)法步长固定,存在动态跟踪速度快和稳态跟踪准确度高的矛盾[2]。对此,本文采用归一化思想利用反正切函数提出一种变步长策略。设计了一种光伏MPPT系统并进行了实验,实验结果显示:提出的方法能够提高光伏电池的利用率,验证了系统的可行性。
1 光伏电池数学模型
不同环境光伏电池的I-U近似特性表达式为[3]
(1)
式中C1,C2为常量参数,与标准条件下的短路电流、开路电压、最大功率点电流、最大功率点电压有关;ISC,UOC分别为标准条件下的短路电流、开路电压;ΔU,ΔI为不同环境下的修正量,与光照强度和温度有关。
2 MPPT原理及扰动观察法的改进
2.1 MPPT电路原理
MPPT电路原理是[4]:当负载电阻值与电源内阻值相等时,负载上得到最大功率。但负载电阻值很难改变,且光伏电池的输出特性表现为强非线性,即内阻值变化。可在中间加入一级直流转直流(direct current to direct current,DC-DC)变换器,如图1,此时等效负载电阻值为R'L,R'L与DC-DC的占空比有关,通过控制占空比改变等效电阻值,使其逼近电源内阻值,获最大功率。

图1 含DC-DC的电路
2.2 归一化变步长扰动观察法
图2(a)为固定步长扰动观察法[5]标准条件下功率曲线。注意到光伏电池功率曲线具有单峰特点,ΔP/ΔU与占空比的改变方向相同,当位于最大功率点左边时符号为正,位于最大功率点右边时符号为负。则本文占空比增量策略为
ΔD=A·2/π·arctan(ΔP/ΔU)
(2)
式中A为步长最大值,ΔP=P(i)-P(i-1),ΔU=U(i)-U(i-1)。
运用归一化思想,借助反正切函数将占空比增量的值域归一化到[-A,A]。运行过程中步长将在-A到A之间变化,不再是固定值,同时也限制了步长最大值为A。运用Simulink中S函数进行仿真该策略,A值与图2 (a)的固定步长值相等,得标准条件下图2(b)曲线,可以看出:改进算法能快速跟踪到最大功率点,稳态后基本未出现振荡。

图2 扰动观察法改进前后对比
3 系统实现
3.1 控制系统总体结构
为了能够实现最大功率的输出,数字信号处理器(digital signal processor,DSP)必须不断地对光伏阵列输出的电压电流进行采样,送入软件控制算法计算后改变输出的PWM占空比,从而控制Boost转换电路。同时,DSP将采集到的实时数据通过RS—232不断发送给PC存储,以便后期绘制曲线和分析,掌握最大功率点的跟踪情况。本系统硬件电路主要由4个部分组成,DSP控制电路、驱动电路、采样电路、Boost电路。整体结构如图3所示。

图3 MPPT控制系统框图
3.2 硬件设计
3.2.1 Boost电路
Boost电路如图4所示,利用电感储存的能量和电源一起向负载供电,从而达到升压的目的。电感、电容值为[6]
(3)
式中D为占空比;Um,Im为光伏电池标准条件下最大功率点电压和电流;r为纹波系数;f为脉宽调制(pulse width modulation,PWM)的频率。
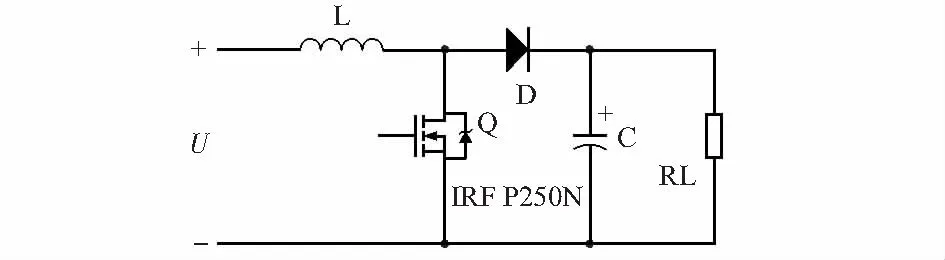
图4 Boost电路结构
本文Um=18 V,Im=2.2 A,r=5 %,f=20 kHz。又系统后期给24 V蓄电池充电,D=(24-18)/24=0.25。可得,Lmin=1 mH,Cmin=18 μF,取电感值2 mH,电容值27 μF。
功率开关管选择IRFP250N,其导通延时为25 ns,关断延时为60 ns,响应快,额定电压达到200 V。二极管选择MUR3020PT,其反向击穿电压能达到200 V。
3.2.2 驱动电路
驱动电路由带隔离光耦HCPL—3120组成,带载能力强,常用于绝缘栅双极晶体管(insulated gate bipolar translator,IGBT)的门级驱动。驱动电路原理如图5所示。为了保证光耦有10 mA电流可靠导通,取R7=274 Ω,R9=10 Ω。

图5 驱动电路
3.2.3 采样电路
采样电路如图6,由霍尔电流传感器(HBC—PS3.3)、电压传感器(HBV025A)和必要电路组成,用于测量光伏电池两端输出电压电流,数据送入DSP处理。其中HBC—PS3.3的1引脚、HBV025A的3引脚接DSP的AD输入引脚。

图6 采样电路
3.3 软件设计
程序的流程如图7所示,其中e为设置的一个阈值,为了避免接近最大功率后仍有振荡。首先通过采样电路检测光伏阵列的输出电压电流,计算ΔP和ΔU;判断ΔP的绝对值是否小于阈值e:若小于,则占空比不变;若大于,则按照式(2)计算占空比变化量,更新占空比。
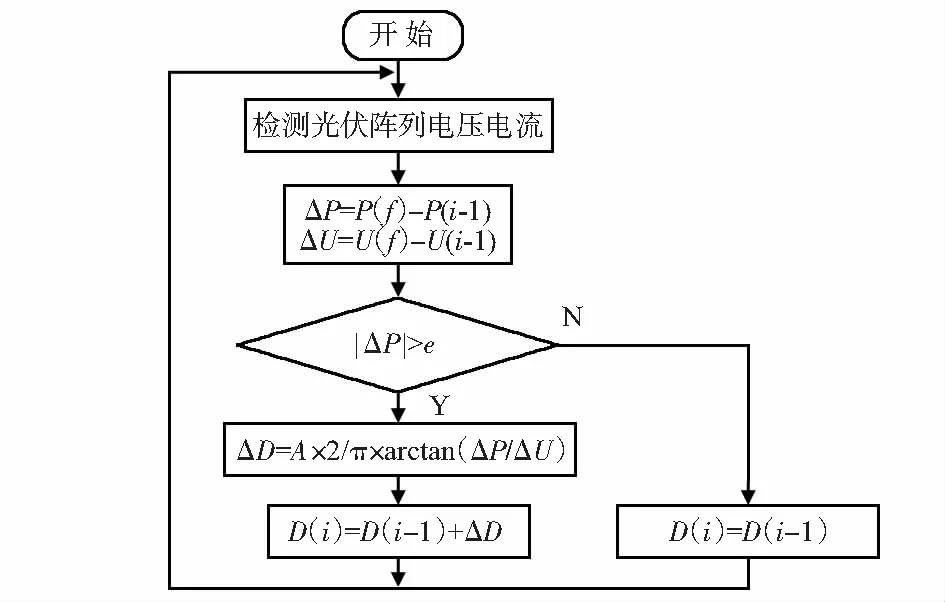
图7 程序流程
按照流程基于TMS320F28335进行代码开发。
4 实 验
环境参数:太阳光照强度641 W/m2,温度为29 ℃,在短时间内视为不变。采用Bosin型号为BX—F40W太阳能板,标准条件下参数为:UOC=22 V,ISC=2.37 A,Um=18 V,Im=2.2 A。负载为100 Ω的功率电阻器,采样周期约为100 ms。
实验得到2组数据,截取前面部分数据经过MATLAB绘制如图8所示曲线,可以看出,采用了归一化扰动观察法的MPPT算法后太阳能板输出了更多的功率,功率输出约13.5 W,而将环境参数和太阳能板参数代入模型,可得到最大功率应该在14.5 W左右。其中损失的1 W功率主要是由于电路中开关管和二极管等的损耗。最后稳定的功率值仍有不超过0.5 W波动,原因是太阳光照强度是连续变化的,在短时间内也不是恒定的,从而引起输出功率的变化。
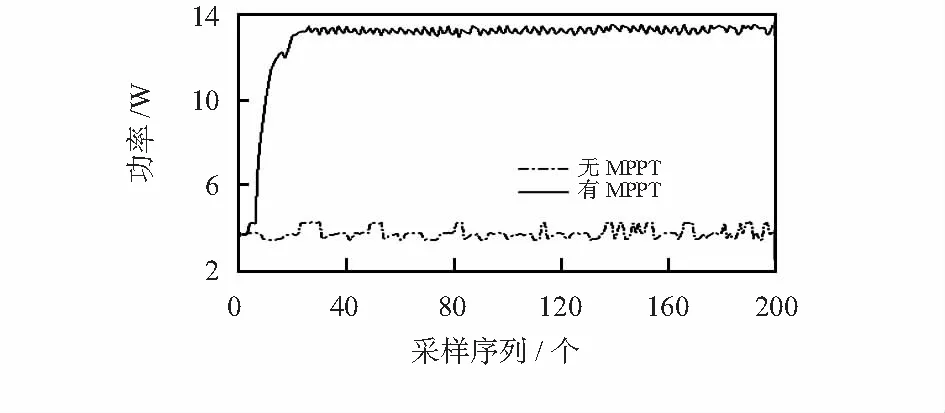
图8 实验数据曲线
5 结 论
本文研究了光伏电池MPPT的基本原理,在扰动观察法基础上提出了归一化变步长策略。设计并实现了基于TMS320F28335的光伏MPPT系统。实验结果验证了系统的可行性。本文为光伏MPPT系统的实现提供了一种方案。
