信号控制四路环形交叉口多进口协同放行方法
2018-09-10马新露杨兴清
马新露,杨兴清
(重庆交通大学交通运输学院,重庆400074)
0 引言
日益增加的交通流量使得无信号控制四路环形交叉口交织区冲突严重,通行效率降低.出于对景观、成本等因素考虑,通常对四路环形交叉口实施信号控制(以下简称信控环交).信控环交控制方法主要有左转不绕环岛控制、单进口轮流放行控制、左转二次停车控制[1-3].上述控制方法大多从宏观角度对车流特征进行分析,而忽略了环内车辆间相互干扰对车辆延误的影响.在环内车辆运行特征方面,刘南云等[4]通过视频图像技术采集单进口轮流放行控制模式下的环交微观交通流数据,发现环道存在频繁换道行为;刘焕峰等[5]考虑环内车流运行特征,并建立信控环交延误模型.上述研究虽然分析了环内车流运行特征,但没有将其考虑到环交信号配时参数中.
1 多进口协同放行控制方法
基于本进口左转车流与逆时针相邻进口直行车流目的出口相同,本文提出多进口协同放行控制方法,相位结构如图1所示,1~4表示顺时针方向4个进口标号;T、L分别表示直行与左转车流,1T代表交叉口进口1的直行车流,其他车流同理表示;阴影部分为相位重叠时间[3].在图1中,当各进口直行与左转相位起止时间相同时,为传统的单进口轮流放行相位结构,在各向车流均衡且左直车辆按照各自车道运行情况下是能达到较好通行效果;若在交通流不均衡及车辆不按道运行情况下,需对多向车流进行合理协同放行,多进口协同放行控制方法考虑因素如下:
(1)进口道及环道均划有左直专用车道,同进口左直车流分道行驶以最大程度避免在入环、环内和出环阶段的交织.
(2)本进口左转车流与逆时针相邻进口直行车流目的出口相同,按照环内分道行驶规则,两股车流在合流阶段不会产生冲突,同时能降低出环阶段车流交织穿插的机率.
(3)由于各进口道不同转向流量不同,需对多流向车流进行协调放行以减少环道时空资源浪费,提高环交通行效率.
(4)入环车辆总是期望尽快通过环岛,即使设有专用左转车道,仍然难以避免驾驶员会根据车道交通状况及目的出口(或在进口道排错队)而在环内进行换道,需要建立能描述车流运行特征的动力学模型.

图1 多进口协同放行相位结构Fig.1 Phase scheme of multi-approach collaborative release
2 基于CTM的环交信号优化模型
2.1 基于CTM的信控环交模型
Daganzo[6]将LWR模型离散化提出元胞传输模型(Cell Transmission Model,CTM),以模拟交通流的动力学特征,得到广泛认可与应用.由于环交环道长度分布不均,而传统CTM要求元胞长度固定,因而引用改进的可变元胞长度的CTM,其传播方程及流量守恒方程公式为
式中:(j,i)表示j车道上第i个元胞;n(j,i)(t)为t时刻元胞(j,i)的车辆数;y(j,i)(t)为t时刻元胞(j,i)流出的车辆数;Q(j,i)(t)为t时刻元胞(j,i)的最大通行能力;N(j,i)(t)为t时刻元胞(j,i)的最大承载能力;Lc为车辆在交通畅通条件下更新时间步长内能行驶的路长;l(j,i)为元胞(j,i)的长度,满足l(j,i)≥Lc;δ=ω/vf,vf为自由速度,ω为拥挤时向后传播速度.
鉴于多数信控环交进口道对掉头与右转车流进行渠化,不受信号灯控制,且对环道车辆运行影响甚微,故本文研究对象限于左直车流.假定进口道及环道均为2车道,将环交分进口道、环道及出口道3部分,进口道与环道元胞的长度及数量由更新时间步长、自由流速度、需求量及环岛半径确定.
2.1.1 进口及出口道CTM
进口道及出口道交通流均有一定数量的元胞,根据交叉口交通流特征,对进口道及出口道某些元胞赋予特定意义.
(1)进口道首末元胞.首元胞储存进入交叉口的交通需求量,其元胞中车辆根据下游元胞空间可利用情况决定是否进入交叉口;末元胞作为模拟信号控制的作用,当该元胞处于绿灯时间,其最大流入量为饱和流量S,当处于红灯时间,其最大流入量为0.
(2)出口道元胞.出口道元胞储存离开交叉口的车辆,其储存容量设为无穷大,即N(j,i)(t)=∞.
2.1.2 环道CTM
文献[8]基于CTM提出普通路段车辆换道模[7]型,该模型不需要考虑车流转向特征,由于环交控制方式、渠化条件及转向比例等因素导致内/外环道不同转向车辆换道行为存在差异,此时换道模型需考虑车流转向特征.为了更好模拟环道不同转向车辆的换道行为,引入虚拟元胞,如图2所示,一个实体元胞包含有左转和直行虚拟元胞,2个虚拟元胞分别存储该元胞的左转与直行车辆,虚拟元胞编号为(j,i)m,其中j代表内外环道(j=1,2);i代表元胞位置;m代表车流方向(m=L,T).通过确定上游元胞期望换道车辆数与下游元胞实际能接收的车辆数,并根据流量守恒得出换道模型为[9-10]
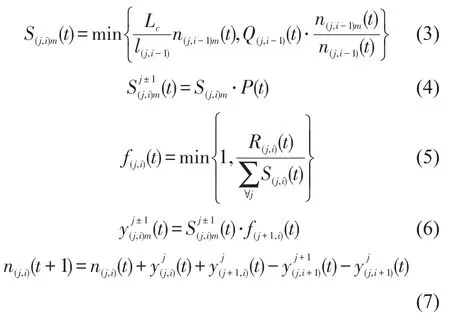
式中:下标(j,i)m表示出发元胞,上标j或j±1表示到达元胞所在车道;n(j,i)m(t)为t时刻虚拟元胞(j,i)m的车辆数;S(j,i)m(t)为t时刻虚拟元胞(j,i)m的发送能力;为t时刻虚拟元胞(j,i)m期望换道的车辆数;P(t)为t时刻该元胞的换道概率;R(j,i)(t)为t时刻实体元胞(j,i)能接收的车辆数;f(j,i)(t)为t时刻实体元胞(j,i)的接收率为t时刻实体元胞(j,i)实际换道的车辆数,为左转与直行虚拟元胞实际换道车辆数之和,即

图2 环道CTM换道示意图Fig.2 Circulating CTM lane-changing diagram
换道模型中,换道概率分为自由换道概率与强制换道概率,自由换道概率主要与邻道的车辆平均速度差有关[9],自由换道概率计算如式(8)~式(9)所示.车辆强制换道与其所处位置有关,强制换道意愿随车辆接近终点而逐渐增强,为反映这种心理诉求,有学者用换道压力[11]进行描述.在信控环交中,进口道排错队的车辆驶入环道后会根据其出口目的而采取换道行为,当邻道出现较好行驶条件时会进行自由换道,同时车辆越接近出口换道意愿越强烈,因此,其换道行为表现为有自由换道和强制换道复杂的综合过程,换道概率如式(10)所示.
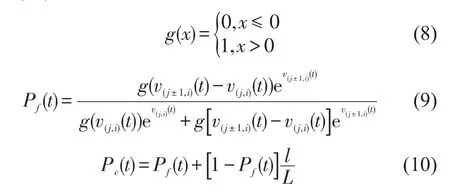
式中:g(x)为根据目标车道与当前车道速度差判断是否变道的判断函数;Pf(t)为t时刻该元胞的自由换道概率;v(j,i)(t)为t时刻元胞(j,i)车辆的平均速度;Pc(t)为t时刻该元胞的换道概率;l L为换道压力,L为直行出口元胞至入口道停车线距离,l为该元胞到入口道停车线距离,0≤l≤L.
2.2优化目标
本文将交叉口延误时间作为交叉口信号控制的主要评价指标,CTM提供了一种简单的车辆延误计算方法[12],即
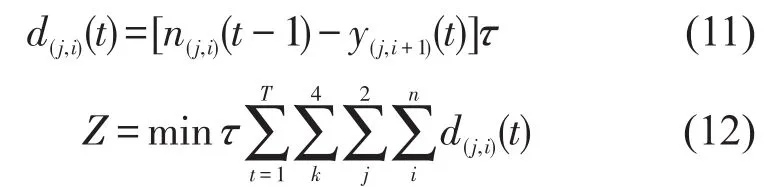
式中:d(j,i)(t)为元胞(j,i)的车辆延误时间;Z为交叉口总延误;τ为更新时间步长;T为仿真时间;4表示进口个数;2表示双车道;n为交叉口元胞数.
现将多进口协同放行相位结构进一步简化成单环相位结构,如图3所示,每个方框为1个相位,从而将信号优化转为对图3中8个变量(t1,t2,…,t8)的求解.根据实践经验,本文取各相位损失时间及重叠时间固定,从安全、效率、行人等因素考虑,各相位绿灯时间及周期满足一定约束,即

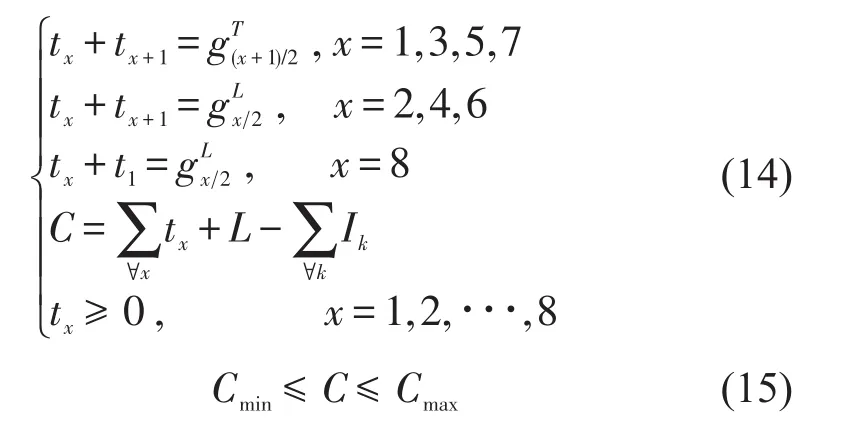

图3 8相位的单环结构Fig.3 A single-ring structure with 8 phases
此外,由于多进口协同放行方式要求环交进口道左直车辆按道行驶,为避免某些进口道出现排队过长及占用邻道现象,各相位饱和度不宜过大(一般不超过1.0),需合理对饱和度约束进行约束,即

将其转化为

式中:qkm为进口道km车流的实际流量;Skm为饱和流量;ykm为流量比.
由于遗传算法对最优解的搜索具有启发式随机性、全局性等优点,而被广泛应用于解决系统优化问题,此外,遗传算法提供了一种对非线性、多目标等优化问题求解的通用框架.上述优化目标函数为典型的非线性规划问题,因此本文采用遗传算法对其进行求解.
3 实例分析
3.1基本情况及参数设置
为验证所提出信控环交优化模型的有效性,现以某市一典型的十字环交为例.环交渠化如图4所示,环岛半径为23 m,车道宽度均为3.5 m,该环交进口道右转车流经渠化不入环,故不予考虑,各进口左转与直行车流排队长度相当,同时放行,无分道渠化.交通需求调查结果如表1所示,各进口流量高峰期趋于过饱和.该环交采用单进口轮流放行控制模式,周期为116 s,东、南、西、北各进口绿灯时间分别为30 s、41 s、30 s、22 s.

图4 环交渠化图Fig.4 Roundabout channelization chart

表1 各进口道的交通流量Table 1 Traffic volume of each entrance lane
遗传算法参数设置为:种群大小取50,交叉率0.7,变异率0.08,染色体长度为8,最大遗传代数为300.CTM参数值选择如下:自由速度27 km/h,反向波速27 km/h;最大通行能力为1 800veh(h⋅lane-1);拥挤密度133veh(km⋅lane-1);更新时间步长取1 s;标准元胞长度为自由速度与更新时间乘积;最小绿灯时间不小于20 s,最大绿灯时间取80 s,最小周期时长40 s,最大周期时长200 s.
3.2 优化结果分析
根据多进口协同放行思想,现假定进口道及环道划分有左转专用道,各向车流在进口及环道严格按照渠化标志标线行驶.根据该环交各进口流量,按照本文所建立的信控环交优化模型,采用Matlab进行模拟仿真,并利用遗传算法对优化模型进行求解,进而得出单进口放行和多进口协同放行方案配时参数.单进口放行方案周期为131 s,配时参数如图5所示,多进口协同放行方案周期为118 s,配时参数如图6所示.

图5 单进口放行方案配时图Fig.5 Signal timing scheme of single-approach-entering
以延误作为评价指标,信控环交延误由入口延误与环道延误组成,入口延误由信号控制引起,环道延误由环内车流间相互作用引起[5].将现状方案、单进口放行方案及多进口协同放行方案进行模拟仿真,评价指标输出结果如表2所示.现状方案的进口及环道延误均比较大,当进口道及环道划分有左转专用道后,优化方案的环道及交叉口延误均有所降低,主要由于现状进口道无分流渠化,左直车流相互参杂排队,进而在环内相互交织,导致环道延误增大,而优化方案中车辆各行其道,车辆间相互干扰较小.多进口协同放行方案延误比其他方案均有不同程度降低,这是因为对多股不平衡车流进行合理协调放行,减少环道资源浪费,降低排队长度,进而降低延误.由此可见,多进口协同放行方案优于现状方案及利用本文优化模型得出的单进口放行方案,一定程度上提高交叉口的通行效率.
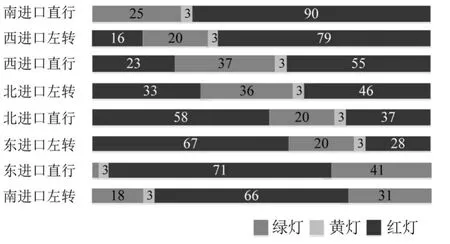
图6 多进口协同放行方案配时图Fig.6 Signal timing scheme of multi-approach collaborative release

表2 各配时方案延误比较Table 2 Delay comparison of all timing plans (s)
3.3 延误影响因素分析
(1)车辆按道排队行驶,流量对延误的影响.
假定各进口流量相同且左直车流比例相等情况下,不同流量下的车均延误如图7所示.左直车流比例相等,车辆各行其道,相互影响较小,故2种方案车均延误变化趋势相同且基本相等;车均延误随流量的增大而增大,大约流量在3 500 pcu/h附近,车均延误随流量增加而急剧增大,这是由于周期随车辆到达率增大而增大,导致进口排队延误增加.
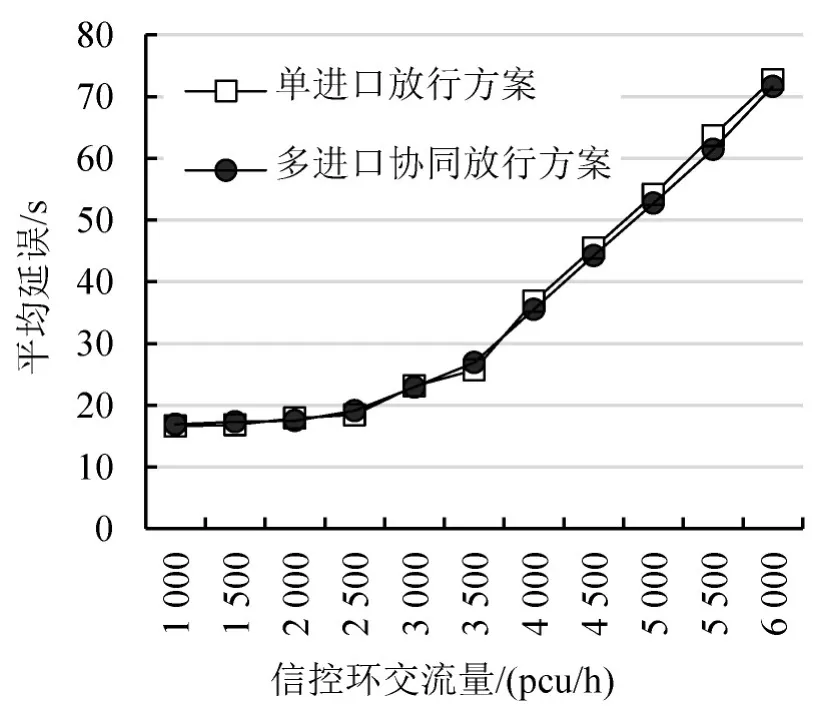
图7 流量—延误关系图Fig.7 Relationship of average delay and flow
(2)车辆按道排队行驶,左转比例对延误的影响.
设信控环交流量为4 000 pcu/h且各进口流量与左转比例均相等,不同左转比例下车均延误如图8所示.多进口放行方案在同等条件下均优于单进口放行方案.这是由于单进口放行方案易造成左转车道时空利用率低,而直行车道排队增长,导致延误增大,这也解释了实际中多数采用单进口放行模式的环交进口道及环道未划有左转专用车道的原因.

图8 左转比例—延误关系图Fig.8 Relationship of average delay and left-turn ratio
(3)左转车道直行车辆占比对延误的影响.
由需求流量表1可知,南、北进口左直车流比例相当,东、西进口的直行与左转车流相差较大且进口趋于过饱和状态,难以保证车辆按道排队,进而在环内换道,当车辆由换道压力而采取强制换道时容易导致目标车道后车减速或停车让行,造成车流阻滞.以表1作为流量条件,假定南、北进口车辆能按道排队行驶;东、西进口直行车辆中有λ比例占用左转车道排队,且环内换道存在,λ与强制换道次数及延误变化关系分别如图9和图10所示.
结合图9和图10分析可知,随着λ值增大,强制换道次数增多,延误增大,这也表明在流量及转向比例固定情况下,进口道车辆排错队行为是引起强制换道次数增多的原因,进而导致延误增大.
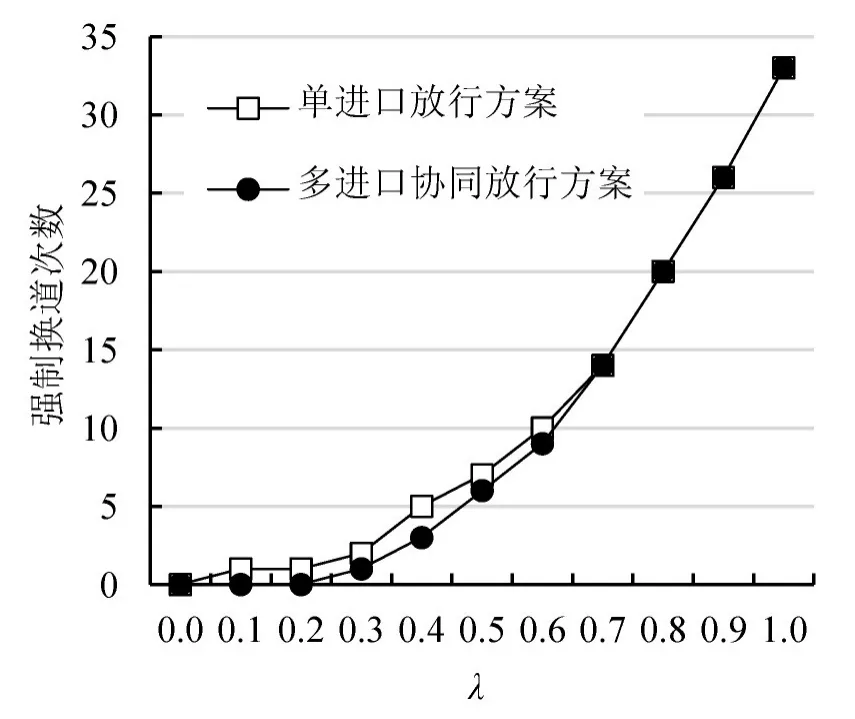
图9λ值与强制换道次数变化关系图Fig.9 Relationship ofλand the number of lane nosing

图10λ值与延误变化关系Fig.10 Relationship of average delay andλ
在图10中,单进口放行方案平均延误呈现先减小后增大的变化趋势,其原因在于,λ值在0.1~0.3范围内,进口左转车道排队长度较小,直行车道排队长度随着λ值增加而减少;随着λ值继续增大,左转车道排队长度增大,左转车辆不得不占用直行车道进行排队,左直车辆相互参杂,环内强制换道次数增多,导致延误增大.多进口协同放行方案在λ值小于0.3时,延误变化不大,这是由于随着λ值增大,合理增加同进口左转与直行车辆同时放行时间;而当λ值持续增大,为避免各进口道间车流冲突,多进口协同放行方案中本进口左转与逆时针邻进口直行车流同时放行时间减少,直至与单进口放行方案信号配时参数相同,进而延误相同,此时进口道需合理拓展车道以降低车辆排错队行为.
4 结论
本文针对传统控制模式流量不均衡及环道车辆相互干扰问题,提出多进口协同放行方法,根据车辆运行特征建立合理的信控环交CTM,以延误作为评价指标进行优化.结合实例验证了多进口协同放行信号优化方法的有效性,结果表明,在进口各方向流量不均衡及进口道排错队而造成环道车辆相互交织的情况下,多进口协同放行控制方法能有效降低环道及交叉口延误.由于本文实例为山地城市的信控环交,非机动车影响较小,而在平原城市交叉口机动车运行往往受到非机动车影响,因此考虑非机动车影响情况有待进一步研究.