背压式母管制供热机组主汽压力控制策略研究
2018-09-08朱青国陈巍文迟振广朱友红
章 鹏,朱青国,陈巍文,杨 诚,杨 毅,迟振广,朱友红
(1.杭州意能电力技术有限公司,杭州 310014;2.浙江浙能中煤舟山煤电有限责任公司,浙江 舟山 316131;3.浙江省电力建设有限公司,浙江 宁波 315000;4.南京科远自动化集团股份有限公司,南京 210000)
0 引言
背压式母管制供热机组其运行方式及控制模式与单元制发电机组不相同,运行过程的自动控制水平较低,长期手动运行方式不仅增加了运行人员的工作强度,也会对机组的安全稳定运行产生极其不利的隐患。
在背压式母管制供热机组的生产运行中,母管主汽压力的控制不仅是机组的难点,也是机组控制的重点。母管压力的波动不仅影响了机组的安全经济运行,还会造成对外供热参数的不稳定,甚至可能发生严重的安全事故。而且,母管制供热机组主汽压力较之于单元机组,其具有更大的延迟特性[1]。不仅如此,并列运行的各锅炉之间也具有极强的关联性,要想确保锅炉燃烧的经济性和安全性,常规的控制方法很难得到运用,需要采用新的控制策略,来使得主汽母管压力控制在允许的范围内[2-10]。
1 机组概况
某发电厂二期扩建工程,为4台57 MW级抽汽背压式供热燃煤机组。锅炉采用杭州锅炉集团股份有限公司生产的高压、无再热、自然循环、固态排渣、露天布置、全钢构架、全悬吊结构Π型煤粉锅炉。汽轮机采用杭州汽轮机股份有限公司生产的EHNG71/63型57 MW级高温高压抽汽背压式汽轮机。其中,主蒸汽系统采用切换母管制,管道从过热器出口集箱引出,至汽轮机前一分为二分别进入2个主汽门。在锅炉至主蒸汽母管和主蒸汽母管至汽轮机主汽门的主蒸汽管道上均设有电动隔离阀。主蒸汽管道如图1所示。
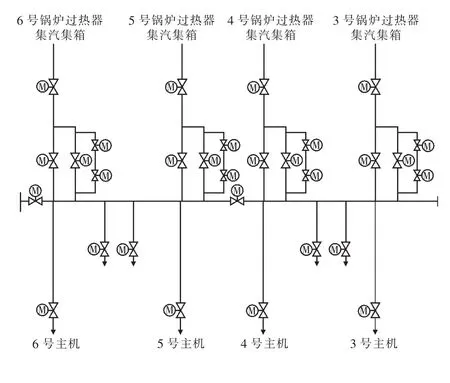
图1 主汽母管管道系统示意
2 特性研究
2.1 动态特性扰动试验
根据该发电厂母管制机组的设计情况,为实现较好的控制效果,先对控制对象做了动态阶跃扰动,并由此拟合出燃料变化时对主汽母管压力的动态数学模型。
将3与4号机2台运行机组的锅炉主控指令切为手动并以母管方式运行。待整个母管压力稳定后,阶跃增加4号机组的燃料指令5 t/h,在参数变化过程中,确保3号机组的燃料量、风量、减温减压供热调门等参数保持不变。以间隔5 s为采样周期,通过曲线和数据的方式记录燃料量和主汽母管压力的变化曲线和数据。变化曲线及拟合曲线如图2与3所示。
2.2 动态特性仿真研究
通过上述扰动试验数据,建立两炉运行时主汽母管压力G的动态三阶数学模型:
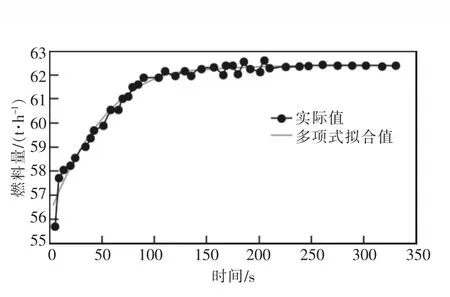
图2 燃料变化、拟合曲线
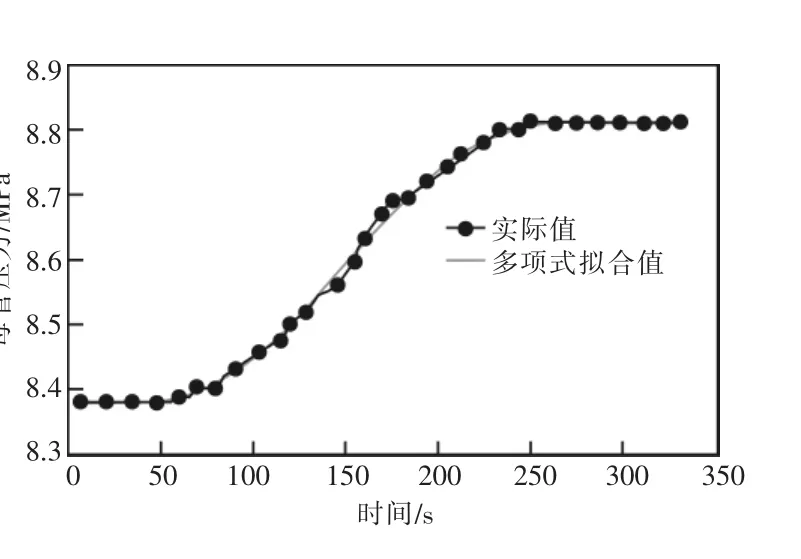
图3 主汽母管压力变化、拟合曲线

式中:T为时间;T1取值5.13 s;T2取值6.18 s;T3取值3.21 s。
并在MATLAB(矩阵实验室,一款数学软件)环境下模拟对主汽母管压力进行阶跃扰动。在PID(比例-积分-微分)参数相同的情况下,仿真过程采用两炉同时调节和单炉调节,仿真结果如图4与5所示。
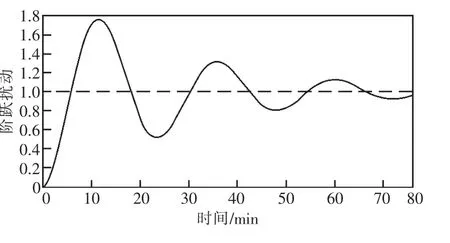
图4 两炉同时调节曲线
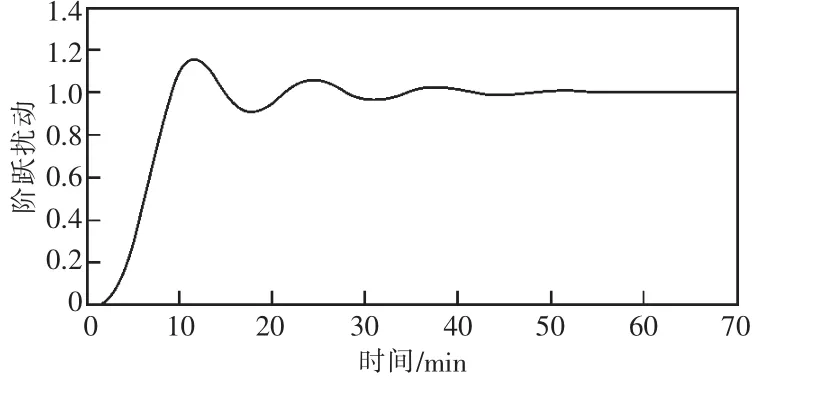
图5 单炉调节曲线
通过上述对比不难发现,当两炉同时参与调节时,因主汽母管压力的大迟延、强惯性特点,在两炉同时参与调节时,扰动周期较长,平稳较慢且容易产生震荡发散;若将参数变小,虽可避免震荡发散,但会造成长时间的调节滞后,调节效果不但不能满足外网热用户快速变化的热量需求,而且一旦发生RB(快速减负荷)等极端工况,主汽母管压力也无法保持稳定。反观单炉调节方式时,若参数整定合适,调节效果较为理想。同理,不难得出四炉同时参与调节情况类似于两炉同时调节的情况,存在产生震荡发散的现象。此外,若采用多炉同时调节的策略,将会遇到以下困难:首先是参数整定工作量非常大,要在不同台数运行的工况点通过试验获得相关数据,整定不同的PID参数;其次是鲁棒性差,当系统出现变化(如改造后或运行一段时间后)往往控制效果会不理想,需要再次花费大量时间、精力进行整定。
为此,不论在控制的时效性、稳定性还是经济性方面,单炉调节方式具有较大的优势。故在控制系统中,将所有运行的锅炉系统看成一个整体,通过设定“调压炉”与“跟随炉”两种“角色”及一个“主调节器”和若干个“辅调节器”来实现。采用“调压炉”的“辅调节器”来调整“调压炉”的锅炉出力,以达到快速消除自身及其他各炉燃烧率的自发性扰动。此外,通过改变“调压炉”与“跟随炉”“辅调节器”的作用参数与作用死区,避免发生各炉之间“抢出力”的现象。“调压炉”允许台数如表1所示。
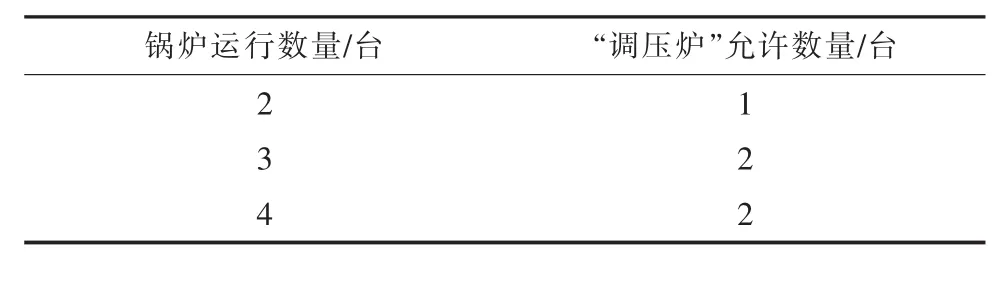
表1 “调压炉”允许数量
3 控制策略
3.1 能量平衡
对于火力发电机组而言,汽轮机只是作为媒介,自身并无能量产生。当外界所需能量与各台锅炉所提供的能量总和相一致时,就能达到系统的稳定。
假设进入所有汽轮机的蒸汽流量总和为Dt,母管蒸汽压力及相应的定值分别为Pm和Po,设期望进入汽轮机的能量总和为Et,则能量平衡公式可表示为:

式中:Et是期望进入汽轮机的能量,也是汽机向锅炉所需求的能量。
3.2 DEB控制方式
正如前文所述,与单元制机组相比,母管压力被控对象的滞后较大。对于滞后较大的被控对象,简单的单回路控制系统难以取得满意的控制品质。若是运用前馈式间接能量平衡的方法,其前馈量的整定不仅受“调压炉”自身不同负荷段燃烧效率的影响,也将受到其他“跟随炉”及锅炉运行数量、搭配的牵制,因此借鉴DEB(直接能量平衡)的控制方式来控制主汽母管压力。
常规直接能量平衡典型公式见式(3),来表征汽机与锅炉的平衡[3]。
式中:p1为汽机调节级压力;pT为机前压力;pTSP为机前压力设定值;pd为汽包压力;K为热量释放信号系数;t为时间。
但是DEB控制方式主要针对的是单元机组的机炉平衡,直接使用到母管制系统中,无法得到相应的能量关系。考虑到锅炉产生的热量有方面,一部分是产生了蒸汽流量;另一部分能量贮存在锅炉本身的工质中。故采用蒸汽流量代替调节级压力来表征锅炉的能量。此外,若从炉侧进入母管的蒸汽流量等于从母管进入机侧的蒸汽流量时,母管压力一定稳定。因此,借鉴DEB控制方式,采用主蒸汽流量Dt来表征机炉之间的能量平衡关系[4]:

为提高控制系统的性能,该工程在式(4)的基础上增加了下列动态补偿:
(1)各台运行锅炉的汽包压力微分。
(2)主汽压力设定值与各台运行炉的汽包压力之差的微分。
(3)主汽压力设定值与主汽压力实际值之差的微分。
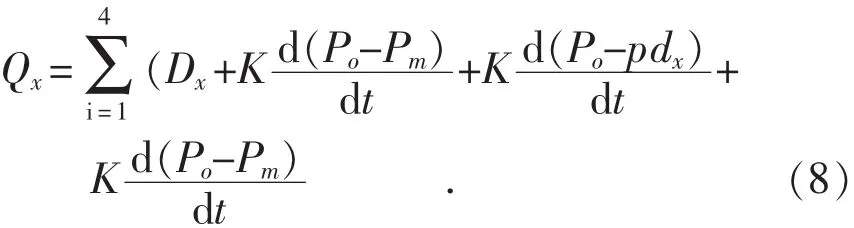
假设第x台锅炉所产生的蒸汽流量为Dx,汽包压力为pdx,锅炉的蓄热系数为K,则第x台锅炉所能提供的热量信号Qx为:

式中:锅炉产生的蒸汽一部分进入汽轮机,表现为蒸汽流量Dx;一部分留在锅炉本体中,表现为汽包压力变化pdx。因此,可通过汽包压力的微分变化来表示锅炉能量的变化最为直观。同理可一并得出主汽压力设定值与各台运行炉的汽包压力之差的理论公式:

以及主汽压力设定值与主汽压力实际值之差的理论公式:故,表征机组锅炉出力及变化的关系可为:

因此,只要以能量偏差Et和Qx作为PID调节器的输入偏差,在系统稳定时,即可确保能量平衡[5]。基于上述分析,母管压力的基本控制策略如图6所示。
3.3 控制分工
(1)“调压炉”。负责承担主汽母管压力的调节,通过快速增减燃料量来迅速改变蒸汽流量,确保主汽母管压力的响应。
(2)“跟随炉”。通过扩大PID设定值的死区,放弱PID比例、积分的作用,来维持稳定自身蒸汽流量,跟随“调压炉”的变化趋势,辅助稳定主汽母管压力。
(3)“主调节器”。以主汽母管压力设定值和实际主汽压力作为设定值和被调量,输出为锅炉侧出口总主汽流量。并运用相关前馈量和锅炉运行台数折线作为比例、积分的变参调节。
(4)“辅调节器”。 作为“调压炉”和“跟随炉”的Boiler Master指令,通过“主调节器”的输出总流量指令,根据“调压炉”与“跟随炉”的作用系数,并与各个锅炉出口实际主汽流量的比较,通过相关前馈量和主汽流量折线作为比例、积分的变参调节。
3.4 控制效果
根据该发电厂的现有机组运行情况(3与4号机组已通过96 h满负荷试运行),该控制策略已在3与4机组并列运行,控制效果如图7所示,可见调节精度准确、速度迅速、效果良好、机组动作合理。
由于锅炉运行台数的折线作为相关PID比例、积分的变参调节,故在5与6号机调试结束后,相关参数及前馈量将基于运行锅炉台数的变化做进一步的调整优化。与此同时,本工程也考虑了母管方式运行中可能遇到的类似于锅炉RB、汽机跳闸等极端情况,通过采用区分母管制、单元制的不同方式的逻辑,来保证机组的稳定运行。上述控制策略将在后续得以运用实践。
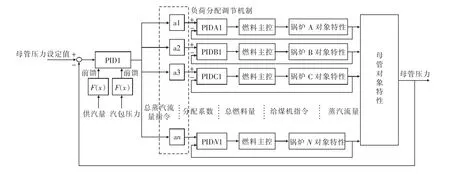
图6 控制策略示意
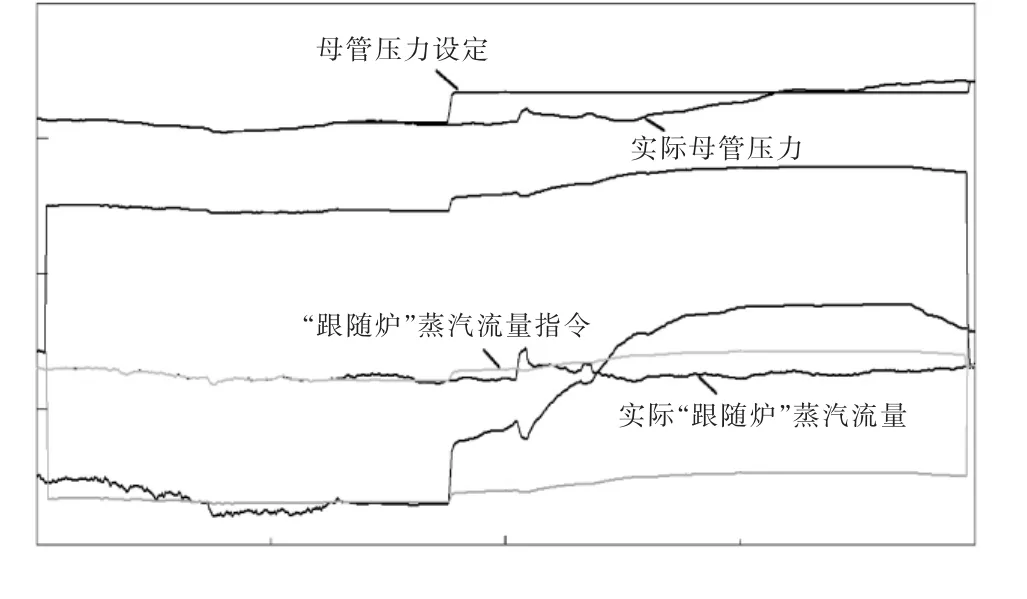
图7 母管压力控制与“跟随炉”蒸汽流量控制趋势
4 结语
通过对上述被控对象的定值扰动试验可以发现,该方案提出的区分锅炉调节速率和调节强度,以及借鉴DEB的控制方式利用主蒸汽流量来表征机炉能量平衡的方法能够较好地控制主蒸汽母管压力,对同类型母管制机组具有较好的借鉴价值和推广意义。