爬楼梯轮椅安放机构的改进基因建模构型设计
2018-09-04王延祥杨先海
王延祥,杨先海
(山东理工大学 机械工程学院,山东 淄博 255049)
爬楼梯轮椅是一种最佳的解决老年人以及残障人士出行的方案.目前现有的爬楼梯轮椅对尺寸跨度大的台阶适应性不高,或者对台阶有伤害,导致无法进行大范围的推广和应用[1-2].本文提出一种新型填充式爬楼梯轮椅设计思路,并对其安放机构进行构型设计.
1 一种新型爬楼梯轮椅
本文提出了一种新的爬楼梯思路,将楼梯台阶看成斜坡上“凹陷”的沟堑的模型.基于上述的“凹陷”楼梯台阶模型,提出了通过“轮番填补”“凹陷”楼梯台阶,从而实现从爬楼梯向爬坡的转变[3],思路示意如图1所示.
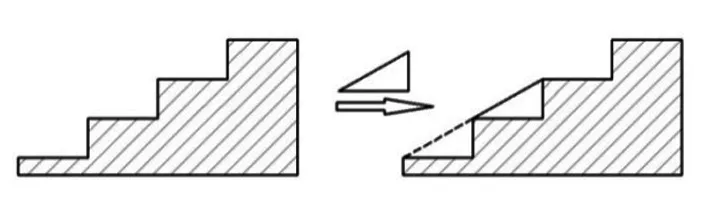
图1 新型爬楼梯思路实现示意图Fig.1 The illustration of a new type climbing stairs
新型爬楼梯轮椅的构想就是基于上述的“轮番填补”“凹陷”楼梯台阶的思路发展而来,其机械部分主要由车体、垫块轮换装置、垫块安放装置、安全防倾倒装置4部分组成.垫块轮换装置将垫块以及垫块安放装置从上一个工作位置送到下一个需要“填补”的位置.由于设计的垫块具有尺寸可调性,使得该新型爬楼梯轮椅具有适应性和稳定性高以及对楼梯台阶无损伤等优点.
2 基于任务约束的变胞机构改进基因建模构型方法
变胞机构的基因建模方法实质是将一个机构整体拆分成满足子构态要求的子机构.本文基于基因建模方法,创造性地引入“拼接聚合”运算[4-6],进而提出一种基于任务约束的变胞机构改进基因建模构型方法,其具体步骤如图2所示.

图 2 变胞机构构型设计步骤Fig.2 Design steps of metamorphic mechanism
1)设计任务分解以及任务约束的分析.变胞机构一个工作周期内的总体任务为F,它由数个子任务组成,所以尽可能将设计任务分解为一般简单机构可以实现的子任务.每一个子任务对应一个子构态,则机构的子工作构态定义为Ui(i=1,2,3,…,n).
2)各子工作构态的构型分析和形态学表的建立.根据分解的子任务,罗列出满足设计约束要求的子机构.本文将采用子构态的形态学表来描述.
3)各子机构运动链的可行性分析.分析步骤2)方案中各子机构实现的难易程度,根据各方案子机构端口相似性的高低实现方案的选择.

本文中各机构的子构态组成将采用下式描述:
式中,Ui表示实现第i种子构态的机构.
5)基因片段的“拼接聚合”.这是变胞机构构型设计中最重要、最核心的一部分,“拼接聚合”可表示为

但是,在此过程中也会出现变异的情况,如:

3 具有变胞功能的垫块安放机构的构型设计
3.1 机构的任务约束分析
应用所提出的变胞机构构型综合方法,设计一种可以在有限的空间内能完成垫块安放的机构,该机构可应用于轮番填补爬楼梯轮椅.由于空间有限,加之垫块的尺寸限制,机构的驱动数和末端执行件(垫块)的运动轨迹就已经确定了.机构的驱动数为1,末端执行件的运动轨迹如图3中所示,由A点到B点,最外围的虚线矩形框即为机构的工作空间,C、D的虚线框分别为动力装置空间和另一侧垫块的空间.

图3 机构的运动轨迹及工作空间Fig.3 The movement trajectory and working space of the mechanisms
首先对该机构的任务约束进行全面分析:(1)驱动工作空间有限,驱动件数量为1;(2)连接杆组工作空间有限;(3)末端执行件需从点A到点B,末端执行件位姿保持水平,末端执行件数量为1;(4)子构态数量为2,子工作构态变换顺序:竖直下放→水平推出→水平收回→竖直上收;(5)轨迹由A点沿实线到B点.
3.2 垫块安放机构的构型设计
1)设计任务分解以及任务约束的分析
在一个工作周期中,机构的末端执行件需要完成下降、推出两种动作,所以将这两种子动作定义为该机构的两种子工作构态,各机构按照工作流程进行顺序变换.设定机构的总任务为F,则机构的两个子工作构态为U1、U2.
2)各子工作构态的构型分析和形态学表的建立根据前面对机构任务的分解,可得各子机构的形态学表[4]见表1.
表1 各子机构的形态学
Tab.1 Morphology of each sub-mechanism

驱动形式子构态一(U1)子构态二(U2)T1 曲柄滑块机构 曲柄滑块机构 T2水平剪切机构/双滑块摇杆机构水平推出机构竖直竖直下放机构剪切机构/双滑块摇杆机构T3 凸轮机构凸轮机构
表1中:U1、U2分别表示垫块安放机构竖直下放、水平推出的两种子构态;T1表示驱动为轮系;T2表示驱动轨迹为直线;T3表示驱动为偏心轮系.分析可得4种方案:
方案1:“曲柄滑块机构”+“曲柄滑块机构”.
方案2:“剪切机构/双滑块摇杆机构”+“水平推出机构”.
方案3:“竖直下放机构”+“剪切机构/双滑块摇杆机构”.
方案4:“凸轮机构”+“凸轮机构”.
3)各子机构运动链的可行性分析
由于该机构需要工作在单驱动模式下,故要求各子构态机构中尽可能包含有相同形式的动力输入,而且能保证该机构有序地完成子任务.通过分析可知,4种方案均满足上述要求.
对上述4种方案子机构的动力传递方式进行考核,可得:
方案1:移动→转动.
方案2、方案3:移动→移动(90°转变).
方案4:移动→转动.
根据上述4种方案子机构动力传递的难易程度,可得4种方案的可行性排序为
方案1、方案4>方案2、方案3
即方案1、方案4的可行性最高.
但是凸轮机构加凸轮机构的方案4占空间过于大且无法实现可逆运动,并不满足本文的使用要求,故本文将采用曲柄滑块机构加曲柄滑块机构的方案1.
4)各子机构的基因分解
方案1与方案2机构按照子构态顺序分解[5-6]的基因片段分别如图4、图5所示.
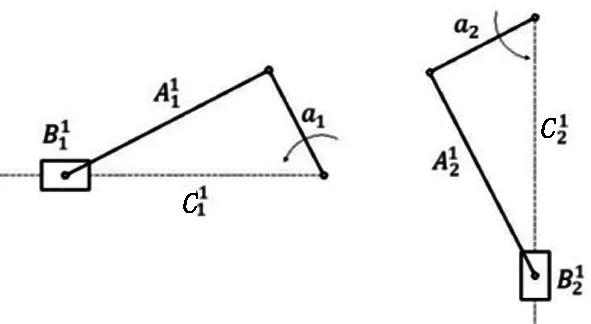
(a)片段1 (b)片段2图4 方案1的基因分解Fig.4 Gene decomposition of plan 1
(a)片段1 (b)片段2图5 方案2的基因分解Fig.5 Gene decomposition of plan 2
5)基因片段的“拼接聚合”
基于前文的描述,拼合过程中的垫块安放机构可描述为
3.3 垫块安放机构的“拼接聚合”设计过程
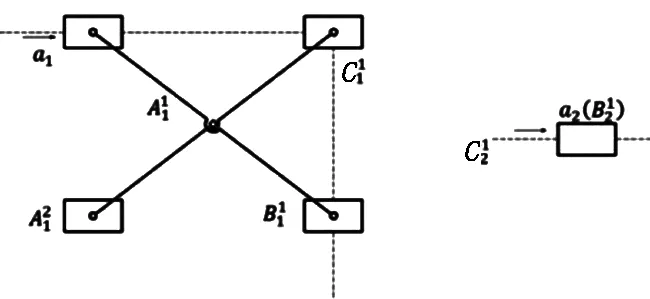
1)将两个子机构的基因片段的“拼接聚合”端口从子机构中分离,并重新聚合端口.根据机构任务的顺序,将可实现子工作构态的基因端口分离出来[7-8],如图6所示.
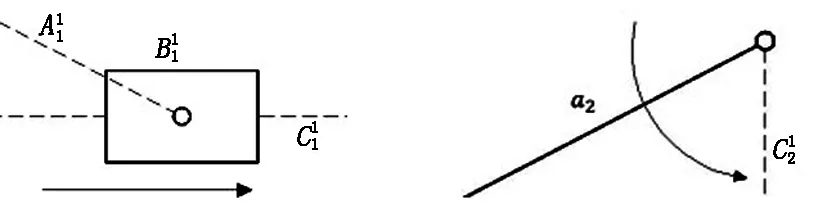
(a)片段1 (b)片段2图6 两个子构态机构的拼接聚合端口Fig.6 Aggregate ports for two sub-architectures

2)辅助构件的构建.由于该方案的动力传递形式为移动→转动,故需要辅助构件将动力由第一子构态传递到第二子构态.由于尺寸的原因本文采用了齿轮齿条机构作为辅助机构.辅助构件的构建过程可表示为
式中:E2-a2表示驱动力输入辅助构件;E1表示驱动力传递辅助构件.则方案1的机构雏形见图7.
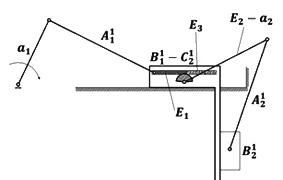
(a)方案1的整体机构

(b)滑块细节图图7 方案1的机构雏形Fig.7 Prototype of plan 1

式中:D0为变胞源机构的运动副矩阵;D1为第一子构态机构的运动副矩阵.
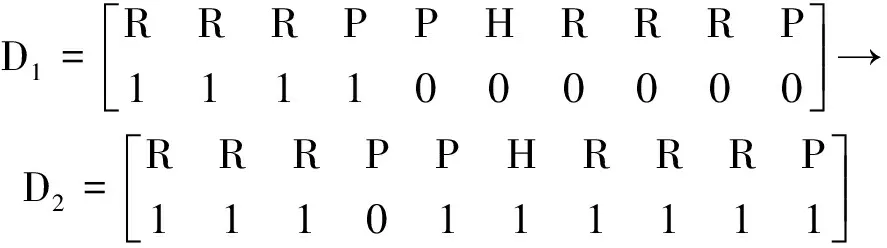
式中:D1为第一子构态机构的运动副矩阵;D2为第二子构态机构的运动副矩阵.
由于任务要求两者的动作是独立、有顺序的,又因只能采用力变胞和几何变胞的变胞形式[10],则需要在第一子构态动作完成的位置处设置一个位置限位保证在动力继续输入的情况下不再有动作,进而进入第二子构态的动作.由于第一子构态的动作已经完成,则只需要固接成一体即可,即成为机架.
基于上述分析,可得各构件的参与情况见表2.
表2 各构件的参与情况
Tab.2 The participation of each component

构态第一子构态机构构件第二子构态机构构件辅助构件a1A11B11C11a2A12B12C12E1E2E3第一构态11110000001第二构态11001111110
注:表中“1”表示参与该运动;反之“0”则是未参与该运动.
因此,垫块安放变胞驱动机构方案1如图8所示.

1.动力摇杆;2.左连杆;3.长滑块;4.齿条;5.弹簧;6.半齿轮连杆;7.右连杆;8.执行滑块;9.机架图8 具有变胞机构的垫块安放机构方案1Fig.8 A putting down mechanism with metamorphic mechanisms of plan 1
4 垫块安放机构的ADAMS运动学仿真
为了验证通过使用本文提出的基于任务约束的变胞机构改进基因建模构型方法设计的具有变胞机构的垫块安放机构满足设计时的轨迹任务要求,采用ADAMS软件对所设计的机构进行运动学模拟仿真,并看其执行件的轨迹仿真结果是否满足设计要求,进而证明该方法是切实可用的.
在ADAMS环境下建立上述具有变胞机构的垫块安放机构模型,如图9所示.图9中,1为动力摇杆,铰接到机架(地面)上;2与地面(机架)之间建立滑动的长滑块;3为在长滑块与齿条间建立的弹簧阻尼;4为固接在地面(机架)上的位置限位块.

图9 垫块安放机构的ADAMS运动学仿真结果Fig.9 ADAMS simulation of a putting down mechanism
在图9所示的机构模型中添加运动副约束,并在图中所示的4处设置了一个位置限位,并且在执行滑块上设置一个MARKER点用于轨迹测量[11].对垫块安放机构进行运动学仿真,将其运动轨迹与轨迹约束条件进行对比.图9中的粗实线即为机构末端运动的轨迹,可以看出,仿真结果与理论设想一致且满足任务轨迹约束要求.所以具有变胞功能的垫块安放机构的设计是成功的.
5 结束语
基于基因建模方法结合对变胞机构任务约束的全面分析并引入“拼接聚合”运算,提出了一种基于任务约束的变胞机构改进基因建模构型方法,并对该方法中的关键步骤进行了详细介绍.本文所述的变胞机构构型方法,不仅具有操作性高的优点,而且使设计过程更为简洁、直观.
利用上述的构型方法,对新型填充式爬楼梯轮椅的关键部件——垫块安放机构进行了构型设计,并对最终设计方案进行了基于ADAMS的运动学仿真,验证了基于任务约束的变胞机构改进基因建模构型方法的正确性.
