基于序列匹配的螺旋桨轴频自动提取方法
2018-09-03杨日杰郑晓庆韩建辉李大卫
杨日杰, 郑晓庆, 韩建辉, 李大卫
(1.海军航空工程学院,山东 烟台 264001; 2.95972部队,甘肃 酒泉 735018)
螺旋桨噪声是水面舰船、潜艇等水声目标的主要噪声源,当发生空化时,螺旋桨桨拍对空化噪声常常会产生周期性幅度调制,通过对这种极富有节奏感的调制空化噪声的解调处理,可以得到与调制相关的离散线谱,而这些线谱频率可以反映出螺旋桨的轴频、叶频及其谐波等信息,因而利用螺旋桨空化噪声调制信息估计螺旋桨的轴频和叶片数等不变特征可以实现被动声纳目标的分类识别[1]。但在实际应用中,螺旋桨轴频的自动估计是一件非常困难的事,线谱值起伏、多调制源干扰和线谱之间不严格的倍频关系直接影响了螺旋桨轴频的自动估计,并且信噪比越低,影响也越严重。
史思远等[2]利用边界元法对船用螺旋桨振动声辐射进行了计算,得到了螺旋桨在流场中的振动辐射噪声。殷敬伟等[3]将轴频及其各次谐波看作一个准周期信号,提取谐波频率的最大公约数法。童峰等[4]基于模糊理论采用累加处理改善信噪比提出了基于模糊系统的轴频提取方法。但这些方法线谱的提取精度有很大的依赖性,实际海洋环境噪声的干扰,线谱幅值变化较大低幅值线谱可能会漏检,同时还会包含由噪声等形成的干扰线谱。孙焱[5]提出了多段融合DEMON谱分析方法,由于水声信号多途干扰和噪声的存在,DEMON谱中真实线谱在融合后幅值峰值会被削弱,不利于真实线谱的准确提取。孙焱提出了基于幅值加权的水声目标辐射噪声线谱检测方法,相对于未进行幅值加权法,检测性能得到了提高。郑恩明等[6]采用了EEMD分解的方法处理舰船辐射噪声,并进行了特征提取和识别。
在DEMON谱中,即使由于干扰的存在使得调制谱中与轴频及其谐波相关的线谱不明显,但总存在着在真实线谱位置出现线谱并趋向于局部峰值的潜在属性[7-8]。本文提出一种基于能量累积和序列匹配的螺旋桨轴频自动提取算法,算法首先利用噪声不同频段的调制信息利用多频段融合改进方法对DEMON谱进行线增强,然后利用平均能量累积方法对与螺旋桨轴频及其谐波相关的线谱进行提取,由于提取的线谱所对应轴频或谐波次数不明确,最后算法通过序列匹配方法计算线谱对应的谐波次数,从而实现螺旋桨轴频的自动提取,通过实验验证,算法取得了较好效果。
1 多频带融合DEMON谱增强
小波变换能在时频两维空间上提取信号中的包络成分,得到反映信号全貌的尺度包络谱[9],可同时确定水声信号中是否有调制信息所在的频带.因此,为了综合利用各频带的信息,改进DEMON分析方法首先利用小波包将信号在频域进行划分,使每一段信号满足窄带条件,同时又不能过窄,因为频域越窄,调制信号能量越小,然后取每一频带信号的包络谱将不同频带包络谱融合累加,得到信号的在全频带的包络谱。
图1所示为多频带融合改进DEMON谱处理框图,首先利用小波包将目标辐射噪声分解为n个子带信号,分别求得n个子带信号的归一化DEMON谱,提取每个DEMON谱的线谱,并以线谱根数的平方作为权重,对各子带DEMON谱进行加权求和,得到水声目标辐射噪声信号的改进DEMON谱。该方法以线谱根数的平方作为权重系数,这样可使线谱多而且明显的DEMON谱加以重权,同时,对目标辐射噪声信号多频段进行DEMON谱分析,可以弥补传统谱分析丢失线谱的缺点,使最后加权求和得到的改进谱具有更多的线谱,充分利用了信号各个不同频段的有用信息。
本文利用4阶小波包变换对水声目标辐射噪声信号进行子带分解。图2(a)所示为某舰载声纳系统录制的实测水声目标辐射噪声信号,经小波变换分频后,其中四个子频段的归一化DEMON谱图,而图2(b)为融合线谱增强后的DEMON谱,从图中可以看出,经小波变换后,各个频带信号的调制各不相同,而改进的DEMON解调方法充分利用了信号各频带的有用信息,能取得较好的解调谱,解调质量更高。
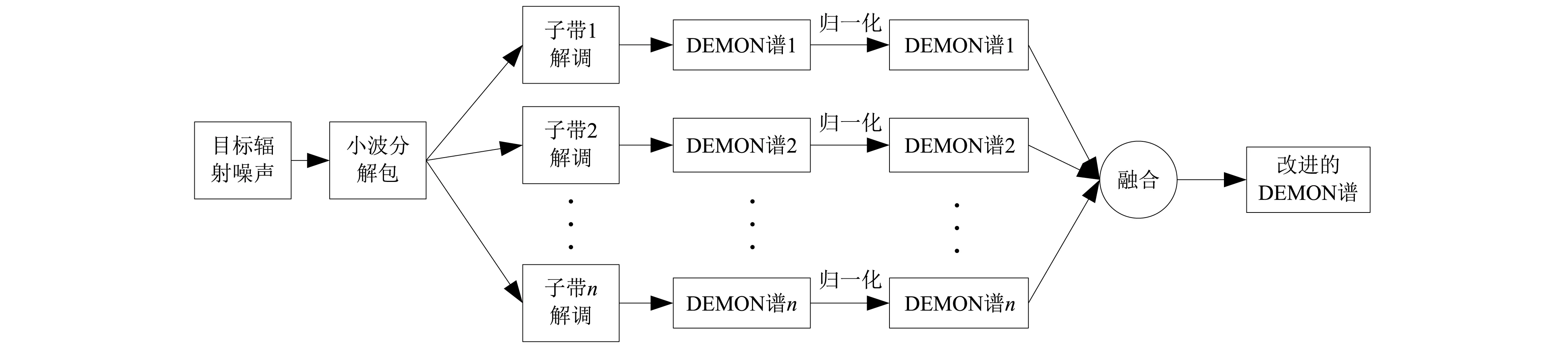
图1 改进的Demon谱处理框图Fig.1 The flow diagram of improved DEMON spectrum analysis
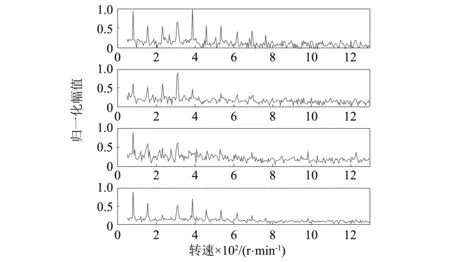
(a)小波变换分频后的不同频段DEMON谱
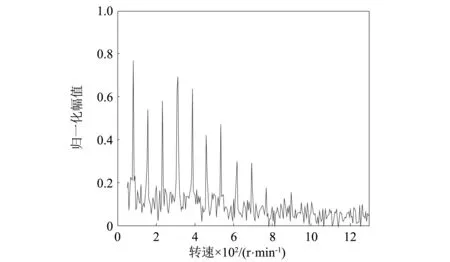
(b)多频段融合改进DEMON谱图
2 基于平均累积能量的线谱提取
在理想DEMON谱图中,呈倍频关系的线谱频率最小值即是目标的轴频,但在实测信号是不现实的,特别是在背景噪声干扰比较强的低信噪比的情况下,很难确定哪根谱线是希望寻找到的用于判断轴频的线谱。
归一化平均能量累积方法的思想是在DEMON谱中搜索线谱及其倍频线谱值的平均累积能量最大的线谱频率,作为螺旋桨轴频或叶频。根据轴频及其谐波的倍数关系,对轴频频率fe,计算其倍频位置fi(fi=i×fe,i=1, 2, …)的邻域:
Ω=[fi-Δ,fi+Δ]
(1)
式中:Δ=f(fe)为邻域变量参数,其为fe的函数,判断Ω内是否存在局部线谱峰值,其中如果存在,则将峰值能量进行累积相加;然后将累加后的能量值除以fe的谐波总数,得到平均累加能量。依次循环计算每一个可能轴频频率的平均累积能量,则平均累加能量最大的fe值,即为目标螺旋桨轴频或某个叶频(轴频的倍频)。
设某子轴频fsub为
(2)
根据算法描述有
Nfe=N·Nfsub
(3)
轴频fe与子轴频fsub的平均累积能量分别为:
(4)
(5)
因为D2(fi)为线谱频率处的DEMON谱能量,有
D2(fi)>D2(fn)
(6)
因此可得
Efe>Efsub
(7)
即轴频或叶频的平均累积能量要大于子轴频的平均累积能量。

图3 归一化平均能量累积方法提取某一线谱Fig.3 Some extracted line spectrum using normalizedaverage energy accumulation method
图3所示,为每个频率位置平均能量累积分布,目标舰船为5叶浆,状态为转速约78 r/min,从图中看出,算法在一次平均能量累积判断时,提取了5倍轴频的叶频线谱,结合线谱分布,可以确定该目标的转速为77.72 r/min。将图3所示的线谱分布与图2(b)所示的线谱分布相比较可以发现,尽管图3所示线谱得到增强且倍频关系明显,但由于噪声干扰和频谱分析分辨率不足引起的频率偏移,谐波簇中频率并不是每个线谱都能得到真实线谱的最佳估计。
3 基于序列匹配的轴频提取
由于噪声干扰及线谱分析时频率分辨率不足等原因,经过平均能量累积得到的螺旋桨谐波线谱频率,不一定是真实水声目标螺旋桨轴频的严格整数倍,这对利用轴频与谐波的倍数关系计算轴频会带来不可控制的误差,因此,本节第2节提取谐波线谱频率作为初始值,利用脉冲序列匹配方法对得到的谐波轴频进一步优化估计。
周期信号x(n)的SAMSF函数[10]ξx(m)可以表示为:
(8)
式中:l=mod(n+m,Q),l=mod(n+m,Q),Q为计算ξx(m)的信号帧长度。故实测水声信号y(n)=x(n)+v(n)的SAMSF函数ξy(m)可以表示为
(9)
从而可以得到不等式:

(10)
通过引入ε(m)≥0,式(9)可以表示为:
ξy(m)=ξx(m)+ξv(m)-ε(m)=
ξx(m)+Γ(m)
(11)
式中:Γ(m)=ξv(m)-ε(m)为由噪声及其他原因引入的偏差。
指出在各种噪声下,ξy(m)与ξx(m)的峰值分布是同步的,ξy(m)在ξx(m)的峰值频率位置有保持其峰值的趋势[11-12]。即在各种不同的噪声环境下,含噪信号y(n)的SAMSF函数ξy(m)可以很好的反映未被噪声干扰信号x(n)的谐波特性,从而可以利用实测含噪声信号包络的SAMSF函数ξy(m)来描述信号的谐波特性,利用若干局部极大值频率估计出ωqopt的谐波阶次,进而估计出信号的螺旋桨轴频。
根据螺旋桨轴频及其谐波的倍数关系,假定提取的谐波线谱频率ω可以用来计算一个时域周期:
(12)
对于给定的ω,Ti可以根据不同的谐波阶次q而变化,但其与轴频周期T0保持固有的倍数关系,定义周期为TI=qT的脉冲序列:
(13)
式中:m∈[0, 1, …,ms],δ(m)为Kroneckerδ函数,IT为位脉冲数量;通过改变q进而改变TI,可以找到q的最优值,使得脉冲序列I(m,q)与DEMON谱线谱频率ξy(m)的真实周期相匹配,定义目标函数,即SAMSF函数加权的脉冲序列:
(14)
由于ξy(m)在T0的整数倍位置会出现局部极大值,因此,使TI与T0同步的q值也会使η(q)为最大值,即qopt的优化值为
(15)
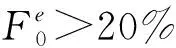
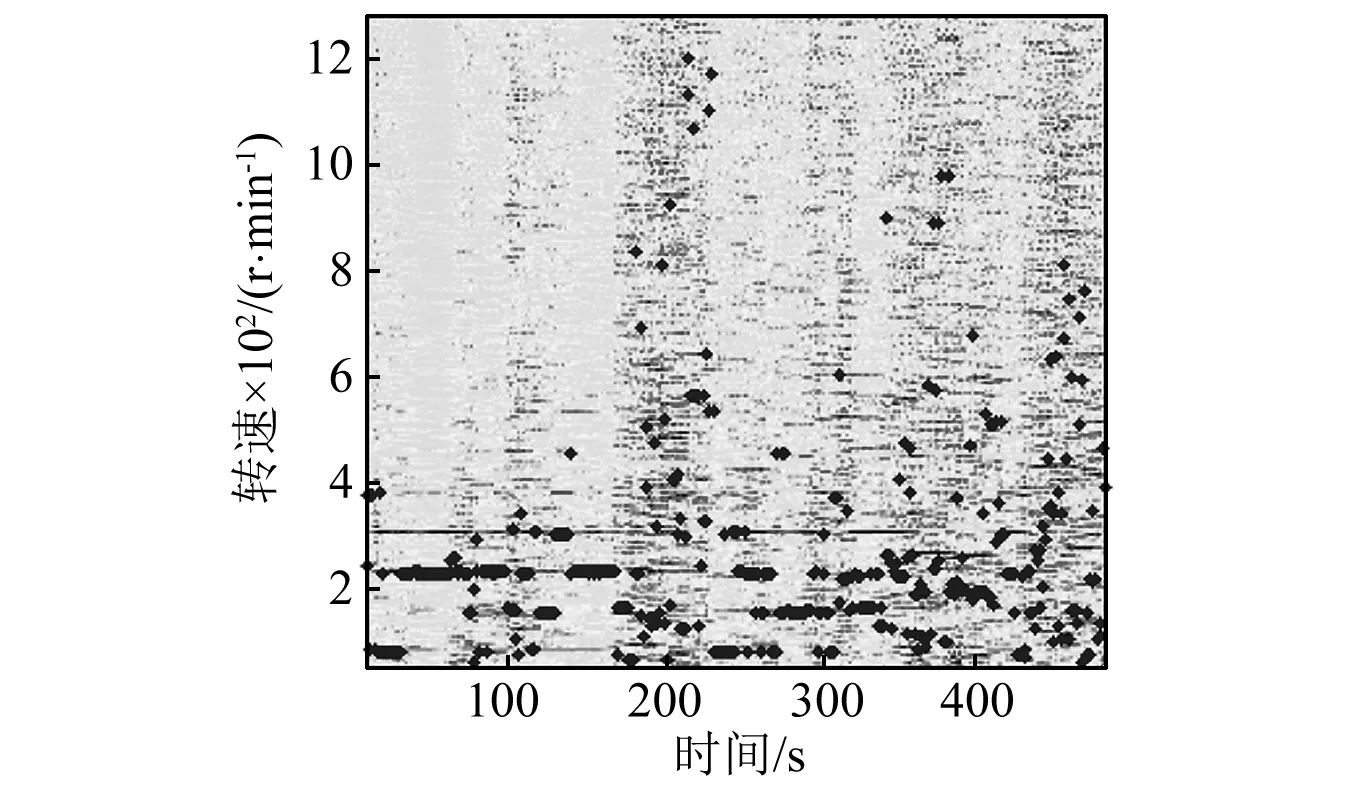
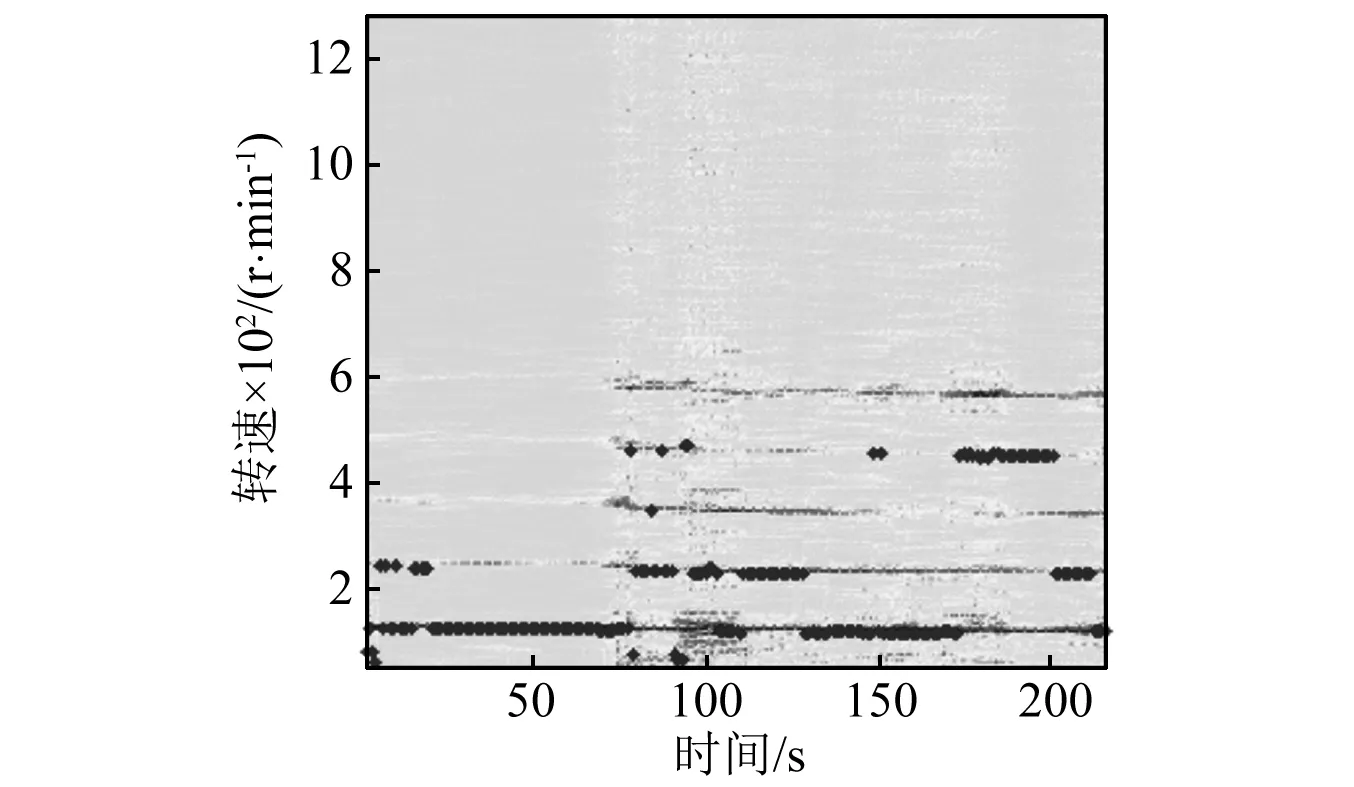
式中:qopt取整型值且满足(IT-1)(qTqopt) (16) 为验证本文算法的有效性,实验选用多艘舰船的实测目标辐射噪声数据样本进行算法实验验证,其中包括商船样本50个,护卫舰样本10个以及包括两栖攻击舰、补给舰等多种样本较少舰型的混合样本40个。实验数据采样率均为fs=44.1 kHz,对平均能量累积方法提取的轴频初始粗值进行拟合的步长设置为Δω=0.01 π,在进行基于频域序列谐波次数估计时,脉冲序列数设为Fn=7。实验时对输入的水声目标辐射噪声信号经滤波,以1 024个采样点进行绝对值检波后,对每个频带内信号进行分帧,这样最高分析频率为21.53 Hz,取每个通道的连续5帧信号进行帧间融合改进DEMON谱计算并提取轴频。 如图4、图5所示为使用本文方法和基于最大公约数的DEMON谱轴频提取技术方法对水声目标辐射噪声提取轴频的轨迹,图中黑色点为计算得到的轴频轨迹。图4中水声目标航速17节,转速约78 r/min;图5中水声目标开始时转速约为121 r/min。从图中可以看出,与基于最大公约数的DEMON谱轴频提取方法相比,本文方法能够稳定且准确地提取目标轴频。 (17) 轴频估计值与真值之间的误差率为: (18) (a)基于最大公约数方法 (b)本文方法图4 某水声目标目标在航速17节,转速78 r/minFig.4 Navigational speed at 17 Knot and rotationalspeed at 78 r/min of some acoustic target (a)基于最大公约数方法 (b)本文方法图5 某水声目标在航速17节,转速121 r/minFig.5 Navigational speed at 17 Knot and rotationalspeed at 78 r/min of another acoustic target 轴频的均方误差: (19) 为进一步验证算法对轴频提取的精确度,采用式(17)和式(19)两个指标进行对比,其比较结果如表1所示。 表1 不同方法轴频提取结果 通过轴频提取精度比较试验和轴频轨迹提取试验可以看出,本节提出的基于平均能量累积和序列匹配的轴频提取技术取得了比较好的轴频提取结果,在实测噪声受到干扰情况下,通过线谱增强、轴频估计确保最后的提取结果的准确性和精确性。 本文针对船舶、潜艇等水声目标螺旋桨轴频自动提取困难的问题,提出了一种基于能量累积和脉冲序列匹配的螺旋桨轴频自动提取算法,该算法在利用多频段融合改进方法对辐射噪声DEMON谱线谱增强的基础上,利用平均能量累积方法提取螺旋桨轴频或其谐波相关的线谱,通过序列匹配方法计算线谱的谐波次数,从而实现螺旋桨轴频的自动提取。最后,利用实测水声目标辐射噪声数据对该算法进行了试验,结果表明,文中算法比基于最大公约数的DEMON谱轴频提取方法在轴频提取的精确性和稳定性上都取得了较好的效果。4 实验验证



5 结 论
