无人机毫米波防撞雷达系统设计
2018-09-03于寿鹏周志权赵占锋
于寿鹏,周志权,赵占锋
(哈尔滨工业大学(威海) 信息与电气工程学院,山东 威海 264209)
无人飞行器(Unmanned Aerial Vehicles,UAV)已经越来越多地被应用于各个领域,然而不论执行何种任务,无人飞行器首先要保证飞行过程中的安全[1]。其中无人飞行器对周围障碍物的检测是实现飞行安全的关键。根据探测原理和媒介的不同,障碍检测方式主要有激光雷达、红外测探、毫米波雷达和机器视觉等[2-3]。机器视觉可以达到对地探测4.3海里[4],但对环境敏感。红外探测在夜间的探测优势明显,但同样对环境敏感。激光雷达探测距离及角度分辨率都比较高,但激光雷达体积过大,很难应用在无人机上[5]。雷达具有抗干扰能力强、可以全天候应用的特点,但传统毫米波雷达存在尺寸大、功耗大的缺陷,难以搭载到无人机平台上。
随着集成电路技术的不断发展,单芯片的毫米波雷达解决方案应运而生。IWR1642是德州仪器公司推出的一款基于FMCW雷达技术的毫米波雷达传感器,能够在76~81 GHz频段内工作,并具有4 GHz的连续调频带宽。该器件采用了TI的低功耗15 nm RFCMOS工艺制造,在极小的尺寸内实现了前所未有的集成度。该器件内部集成了内置锁相回路(Phase Locked Loop,PLL)及AD转换器的两个发射系统和4个接收系统。同时IWR1642内部不仅集成了负责雷达信号处理的TI高性能C674x DSP子系统,还集成了一个基于ARM R4F内核的控制器子系统,主要负责雷达前端的配置、雷达系统的控制及通信等任务。本文基于该器件的特性提出了一种基于IWR1642的小型无人机载毫米波防撞雷达设计方案,实现对无人飞行器前向障碍物的检测,其具有体积小、功耗低、精度高等特点,性能指标较原有的系统有了较大的提升。
1 系统总体设计
雷达系统主要由天线系统及IWR1642子系统两部分组成。天线系统是由两个发射天线及4个接收天线按照一定规则组成的阵列,负责向外辐射调频连续波及接收目标反射回的信号。
IWR1642子系统由IWR1642芯片、电源管理单元、程序存储器、晶振及相关通信接口构成。IWR1642内部DSP处理器负责从雷达前端读取数据并作雷达信号处理,ARM处理器则主要负责调度控制雷达系统工作同时完成与外部设备的交互,对外输出目标检测信息。
系统组成如图1所示。

图1 系统组成
2 系统硬件设计
IWR1642高度集成的特性不仅降低了成本、缩小了体积,更使得基于该器件的雷达系统硬件设计变得更加方便和快捷。系统硬件结构主要由雷达天线阵列、电源模块、IWR1642及IWR1642的一些外围电路组成。
2.1 电源模块
本文设计的雷达系统采用单一5 V电源供电,整个系统需要3.3 V,1.8 V,1.2 V和1.0 V4种电压。考虑1.8 V及1.0 V将被直接应用于IWR1642内部的模拟及射频模块,因此对这两种电压有一定的纹波要求。同时考虑电源模块的体积及效率,系统初级电源采用高效率的开关电源方案,对要求较高的电源再使用一级线性稳压器。
开关电源芯片采用TI的多通道电源管理芯片LP87524B,其内部具有独立的4通道BUCK降压转换器,具有4 MHz的开关频率,总输出电流可以达到10 A,并支持过热及过载保护。具有标准的I2C通信接口可以在线配置输出电压,在本设计中配置其内部四通道电源分别输出3.3 V,2.1 V,1.3 V和2 V 4种电压。
线性稳压器采用T I的高精度、低噪声稳压器件TPS7A83A,在可以提供2 A电流的同时最大压差仅为200 mV。其优异的性能可以抑制电源产生的相位噪声和时钟抖动,十分适合应用于模拟及射频组件。本设计中利用该器件将前级开关电源生成的2.1 V和1.3 V调整至1.8 V和1.0 V供IWR1642使用。系统整体电源拓扑如图2所示。
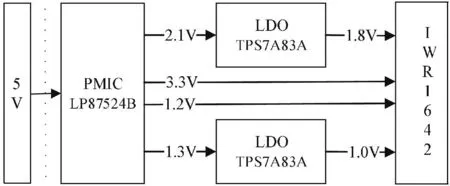
图2 电源拓扑结构
2.2 程序存储器模块
IWR1642内部没有集成可供用户使用的非易失性存储器,因此在系统设计时必须为IWR1642配置外部的存储器,以存储IWR1642内部ARM及DSP核的用户代码及其他需要掉电保存的系统参数。IWR1642支持自动从Queued SPI(QSPI)FLASH存储器加载用户应用程序。IWR1642内部QSPI仅支持主机模式,可以通过1,2或4条数据线访问外部的SPI设备。并且IWR1642内部QSPI模块具有内存映射寄存器接口,可以配置直接访问外部SPI设备的数据,大大简化了软件设计复杂度。本设计采用QSPI FLASH的型号为MX25R1635FZUIL0,容量16 Mb。图3为QSPI FLASH电路。
2.3 CAN总线接口模块
本设计中雷达系统与外部的数据、命令交互采用UART串行接口及CAN总线接口。IWR1642内部DCAN控制器模块支持CAN 2.0协议,支持串行多主机通信协议,通信速率最高1Mbps,外部适配合适的CAN收发器即可满足分布式实时控制的要求。这里物理层的CAN收发器采用TI的TCAN1042V,设计电路如图4所示。

图3 QSPI Flash电路

图4 CAN总线接口电路
2.4 天线模块
IWR1642内部集成两个发射通道及4个接收通道,需要设计与之匹配的天线完成导波信号与空间信号的转化。本设计天线采用PCB微带天线,考虑国内制造工艺及性价比,PCB介质板选用ROGERS公司10 mil厚度的RO4350B高频低损耗板材,介电常数3.66。设计天线驻波比<1.6,特性阻抗54.55~54.90 Ω,增益9.3 dB。4个相同的接收天线在水平方向上按λ/2的间距排列,两个相同的发送天线在水平方向上按照2λ的间距排列组成天线阵。板载PCB微带天线如图5所示。

图5 板载雷达微带天线布局
3 系统软件设计
本文设计的雷达系统应用程序基于TI RTOS实时操作系统开发。TI RTOS操作系统内核是一种确定性抢占式多任务内核,这就允许开发人员在实时期限内创建完成相对复杂的应用程序,十分适用于雷达系统。根据DSP与ARM各自的特点及本系统需要实现的任务,分配数字信号处理(Digital Signal Processing,DSP)核完成数字信号处理任务,反雷达导弹(Anti Radar Missile,ARM)核完成雷达系统的通信及控制任务。雷达系统软件整体框图如图6所示。

图6 雷达系统软件程序
3.1 ARM程序设计
本设计中ARM处理器主要被用于雷达系统的控制及同外部设备通信。系统上电后ARM处理器首先完成自身硬件的初始化工作,并使DSP处理器退出复位状态,然后启动运行TI-RTOS系统。ARM处理器中有 mssInitTask,mmsMMWaveCtrlTask,mssConsoleTask,mmsCtrlTask及mmsMailboxTask 5个系统任务运行完成系统功能。各任务间采用信号量及事件机制同步,并通过邮箱完成与DSP核的通信。
mssInitTask任务在系统中最先被创建和运行,负责完成系统所需硬件外设的初始化工作,并完成其他任务的创建及运行。
mmsMMWaveCtrlTask任务是TI提供的毫米波组件运行所必须的任务,主要为组件程序的运行提供上下文环境。
mssConsoleTask任务主要完成通信功能。从串口接收数据,完成命令解析,发布相应的信号同步其他任务的运行。同时该任务将根据命令对外通过串口输出检测到障碍物的信息。
mmsCtrlTask任务主要是根据来自mssConsoleTask的信号完成相应的操作,完成直接的雷达系统控制功能。
mmsMailboxTask任务被用于读取来自DSP核的消息,完成核间通信功能。
3.2 DSP程序设计
本设计中D SP主要被用于雷达信号处理,根据ARM发送的消息,配置信号处理链,完成信号处理提取目标信息。DSP中设计dssInitTask,dssMailboxTask,dssMMWaveCtrlTask和dssDataProcessTask 4个系统任务完成预定工作。
dssInitTask任务主要负责完成系统所需硬件外设的初始化工作,并创建其他任务。
dssMailboxTask 任务被用于读取来自ARM核的控制命令,完成核间通信功能。
dssMMWaveCtrlTask任务主要为TI毫米波组件提供运行的上下文环境。
dssDataProcessTask任务是DSP中的核心雷达信号处理任务。DSP从雷达射频前端获取数据并进行数据处理后,将信号中含有的目标障碍物的距离、速度和角度信息利用特定的算法提取出来。无人机防撞雷达涉及的雷达信号处理算法主要有时域信号的滤波及加窗技术、目标检测、频谱估计、角度检测等[6]。雷达信号处理流程如图7所示。
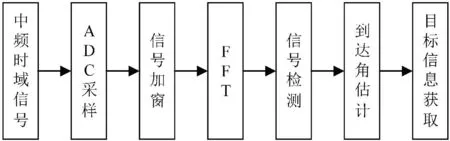
图7 信号处理流程
4 测试
为了验证雷达系统功能,设计了无人机搭载雷达系统进行户外测试实验。无人机平台选用大疆的经纬M200,雷达系统被设计固定搭载在M200云台上,以减小无人机震动对雷达系统的影响。无人机升空后距地面3 m开始悬停,接收到开始工作命令后,雷达系统开始工作并对PC端回传检测到的障碍物信息。
第一次实验在无人机前方15 m,高1.5 m处放置一个角反射器,雷达系统成功检测到目标,实时在线给出的测量距离为15.36 m。将采样数据做离线处理后,处理结果如图8—9所示,与在线处理结果一致。

图8 角反射器测试IQ通道时域信号

图9 角反射器测试一维FFT距离—幅度
第二次实验在无人机前方高1.5 m处,与雷达平行横向放置两根用于模拟电力线的直径为15 mm的钢管,钢管前后相距30 mm,继续做一组测试,测试结果如表1所示,成功测量出两根电力线的距离。

表1 模拟电力线测试实时处理结果
同样将采样数据做离线处理后,处理结果如图10—11所示,与在线处理结果一致。

图10 模拟电力线测试IQ通道时域信号

图11 模拟电力线测试FFT处理结果
5 结语
本文设计了以IWR1642为核心的小型无人机防撞雷达系统。系统实现了对无人机前向障碍的检测,并提取出障碍物的距离信息。通过串口实时将障碍物信息传出,同时可通过串口对雷达进行启停控制,降低功耗。实验结果验证所设计的雷达能够实时检测到障碍,并给出障碍物信息,满足避障雷达系统要求,同时其由于体积小、功耗低,具有较高应用价值。
