机车转子非线性系统的动力学分析
2018-08-27杨绍普杨月婷
杨 柳, 杨绍普, 杨月婷
(1.北京交通大学 机械工程学院,北京 100044;2.石家庄铁道大学 机械工程学院,石家庄 050043)
工程中受复杂激励作用下,机车双转子传动系统动态分析是机车运行状态和疲劳强度的关键。尤其是在机车高速运行中,出现的轴承及齿轮故障会对机车运行带来很大的安全隐患。所以如何准确建立非线性转子动态模型及检测转子的振动成为分析的关键。
机车双转子系统由轮对齿轮、轴承及主、从转轴组成。最初,Jeffcott转子系统,经常被用作研究大型柔性转子结构模型,系统稳定性、临界转速和动态特性[1-3]。Jeffcott[4]最早提出并分析了转子动力学单自由度模型。并研究了在超临界运行时,转子具有自动定心现象。之后,Cveticanin[5]建立了Jeffcott 转子的二阶挠度函数的非线性微分方程,并对Jeffcott转轴进行了稳定性分析。Ishida等[6]利用Jeffcott转子模型,出现2倍转频时,分析系统非线性分岔特性及内共振现象。随着工业发展,对称转子系统轴-齿轮-轴承耦合系统分析是成为研究重点[7]。转子系统的特性研究主要从以下几个方面,首先,对柔性转子稳定性及临界转速的研究。其次,不平衡质点对幅值和相位角的影响。Dimentberg[8]是第一个给出简支撑边界条件下,考虑转轴质量,转子齿轮耦合系统的动态方程。魏静等[9]建立高速机车齿轮传动系统弯扭耦合多自由度动力学模型,定量分析了齿轮内部激励、齿面间隙、轴承游隙等参数等对高速机车齿轮传动系统的影响。Eshleman等[10]研究了轴承黏弹性条件下,弹性转轴的临界转速求解及幅值响应分析。唐进元等[11]建立了含齿侧间隙和径向间隙的动力学模型,着重分析研究了齿轮系统的混沌和分岔现象。窦唯等[12]针对实际高速齿轮转子系统,建立了考虑齿轮啮合及扭转共同作用的弯扭耦合非线性振动模型,研究了偏心量、齿轮啮合刚度等参数对系统振动响应的影响规律。Luczko[13]建立铁木辛柯模型,分析了轴转子动力学响应。Shiau等[14]求解了复合支撑条件下,旋转轴的临界转速。而对于双转子系统的动力学的研究,主要从利用有限元模方法分析双转子轴承系统,求解其临界转速及模态变形[15-16]。其中,Gupta等[17]采用传递矩阵法计算双转子系统的临界转速和振型, 分析轴承刚度和阻尼系统响应。
以上文献研究可以看出,现有转子动力学模型大多数只是考虑转子质量的影响,而忽略了支撑轴承、啮合刚度等非线性因素的影响,对考虑齿轮-转轴-轴承传动系统的非线性振动模型的较少。本文在前人基础上,研究了复合边界条件下,考虑转轴质量的动力学模型,并综合针对轴承、轮轨激励、齿轮啮合刚度的基础上,建立了传动系统的非线性双转子动力学模型,求解了其临界转速,不同转速下固有频率、轮轨接触力及齿轮刚度等非线性参量变化对传动系统动力学特性的影响。
1 动力学模型
考虑随机轮轨激励,轮对刚性支撑,轴承-齿轮啮合刚度等条件下,机车非线性双转子轴的动力学模型,如图1所示。
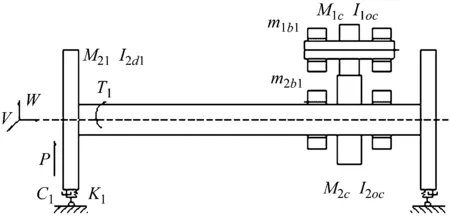
图1 机车转子轴模型
转子系统非线性动力学模型如图1所示,在该模型中,假设两轮对弹性支撑,考虑轴承及齿轮等参数的影响。图1中:T1为转子扭矩;m1,m2为轴承及M2c,M1c大小齿轮质量;M2i为左右轮对质量。Ω为输入转动角速度;I1j,I2d2,I2oc,I1oc分别为轴箱轴承、轮对、大小齿轮转动惯量;c,k(t)分别为轮齿啮合阻尼、刚度;w1,v1,w2,v2分别为主、从动轴横向及其纵向弯曲位移变形量;θ1,θ2分别为主、从动扭转位移变形量;I1o,I2o分别为主、从动轴极转动惯量;I1d,I2d分别为主、从动轴转动惯量;A1,A2分别为主、从动轴截面面积;E,G分别为弹性模量、剪切模量。
建立系统非线性动力学模型,综合考虑转子质量及其转动惯量,齿轮及轮对的集中质量和转动惯量在复合边界支撑下系统动能及势能。
转子动能
齿轮动能
(3)
轮对动能
(4)
系统势能
(5)

(6)
系统啮合刚度及其阻尼作用能量
(7)
式中:K(t)为齿轮啮合刚度;Cc齿轮啮合阻尼系数;r1,r2为主从动齿轮的基圆半径。
边界轴承
轴承刚度、及阻尼刚度对系统影响
(10)
式中:K1b,K2b为主从动轴支撑轴承刚度;c1b,c2b为主从动轴支撑轴承阻尼系数;l1,l2为主动轴及从动轴长度。
外力势能
(11)
机车垂向平面内,车辆与轨道之间的耦合作用下, 通过轮轨接触实现运动。轮轨垂向作用力由著名的赫兹非线性接触理论[18]
式中:G为轮轨接触常数;δw2(t)为轮轨相对变形量,选取轨道变形量为零;P(t)外载荷。
根据Hamilton最小势能原理

(12)
将式(1)~式(11)代入得主动轮轴动态方程
mΩ2(ezsinΩt-eycosΩt)
(13)
Kc[δ(x1c)(w1(x,t)+r1θ1)-
δ(x2c)(w2(x,t)-r2θ2)-e(t)]=
mΩ2(ezcosΩt-eysinΩt)
(14)
-Teδ(xe)-r1K(t)[δ(x1c)(w1(x,t)+r1θ1)-
δ(x2c)(w2(x,t)-r2θ2)-e(t)]
(15)
从动轮轴动态方程
(16)
-Tfδ(xr)-r2K0[δ(x1c)(w1(x,t)+r1θ1)-
δ(x2c)(w2(x,t)-r2θ2)-e(t)]
(17)
K0[δ(x1c)(w1(x,t)+r1θ1)-
δ(x2c)(w2(x,t)-r2θ2)-e]=
mΩ2(ezcosΩt-eysinΩt)+δ(xk)P(t)
(18)
式中:P(t)为轮轨激励;e为偏心距;K(t)为齿轮啮合刚度,利用Fourier级数展开啮合刚度为
K(t)=k0+a1cosΩt+b1sinΩt
(19)
边界条件
主传动动轴承支撑下
(20)
(21)
从动传动轴简支撑下
(22)
(23)
2 动态方程化简
将上列公式代入式(13)~式(23)。
主动轮轴动态方程
(24)
(25)
δ(x2c)(w2(x,t)-r2θ2)-e]
(26)
方程系数
从动轮轴动态方程
(27)
(28)
-T负载δ(xr)+T′[δ(x1c)(w1(x,t)+r1θ1)-
δ(x2c)(w2(x,t)-r2θ2)-e(t)]
(29)
方程系数
边界条件
主传动轴简支撑下
(30)
(31)
从动轮传动轴边界

(32)
(33)
方程系数

3 临界转速及固有频率
令方程
z1(x,t)=φ1(x)eiωti+φ1(x)eiωt
z2(x,t)=φ2(x)eiωti+φ2(x)eiωt,θ1(x,t)=ψ(x)eiω1t
代入式(24)~式(29),其中ε项为零。
主动轮轴模态方程
(34)
满足的边界条件
(35)
从动轮轴模态方程
(36)
满足的边界条件
(37)
由式(34)得,主动轴模态方程的通解
(38)
(39)
其中系数为
(40)
其中,主动轴扭转角边界条件可知
(41)
将式(38),式(40)代入主动轴弯曲模态边界条件式(35)中,其中:c1,c2,c3,c4为任意常数项,满足
(42)
式(42)detΔ=0是关于ω的超越方程,有无穷多个解,求解其方程根问题,不能简单利用迭代求解,本文采用区间分段法,求解超越非线性方程根问题。如图2所示,其中,Ω的取值将不直接影响固有频率的大小,主动轴前三阶临界转速42, 258,577。
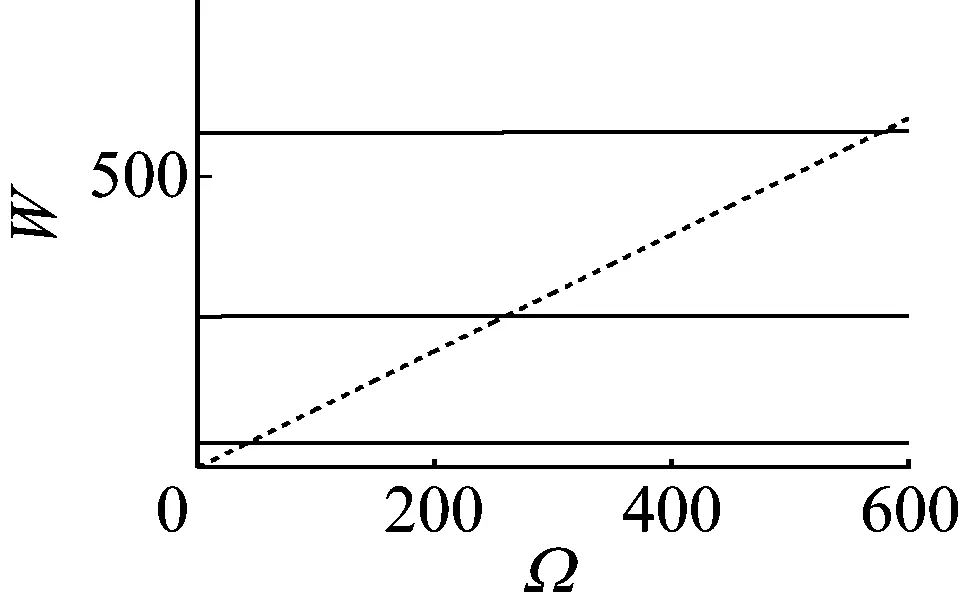
图2 机车主动轴临界转速
由式(36)得,从动轴模态方程的通解
(43)
(44)
其中,
(45)
由从动轴扭转角边界条件可知
(46)
将式(43)、式(45)代入从动轴弯曲模态边界条件式(37)中,求取c21,c22,c23,c24方程矩阵detΔ2=0,式中是关于ω的超越方程,有无穷多个解,采用与上式同一解法。其中,系统参数选定下,转速Ω改变,转子系统固有频率的大小如图3。图中数值结果表明,低价固有频率的大小受转速影响较小。随转速Ω的增大高阶固有频率缓慢增加。系统前三阶临界转速值为:12.6,43.8,86.5。
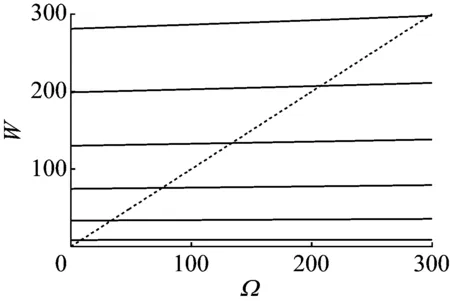
图3 机车从动轴临界转速
当Ω=ω临界转速发生时,求取系统机车前三阶模态,如图4~图6所示,主动轴耦合模态值相对较小,从动轴耦合模态值变化明显。低阶模态值较大,随着模态阶数增加,模态值减小。
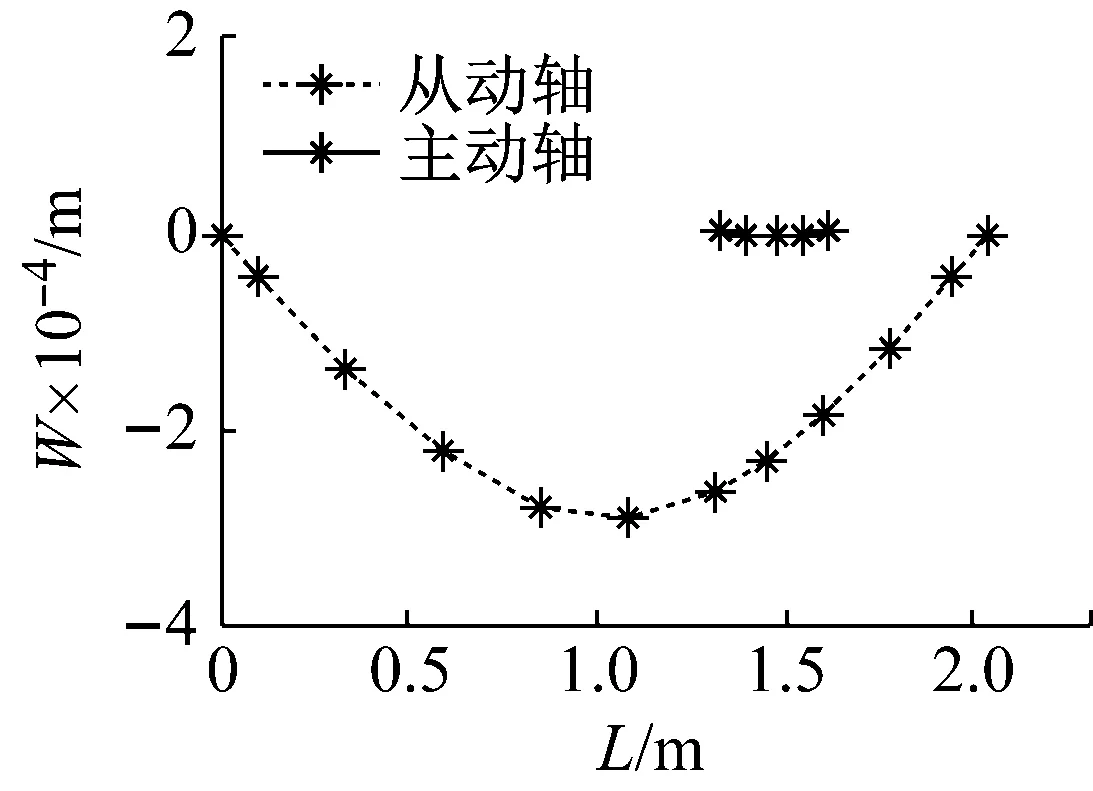
图4 一阶模态分析

图5 二阶模态分析
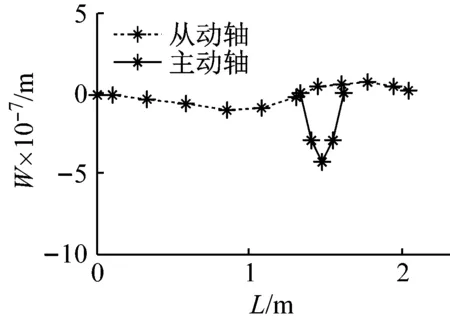
图6 三阶模态分析
4 系统方程化简
利用Galerkin方法,离散非线性偏微分方程,试探函数选取前一阶模态形函数。
令方程
(47)
代入式(24)~式(29)中,方程微分方程中乘以φ1(x),φ1(x),并在区间内积分得
系统主动轴动态方程简化为
Fr+Ff
(48)
(49)
(50)
系数如下所示

χ6=β1cη14
系统从动轴动态方程简化为
(51)
(52)
(53)
系数如下所示

5 数值分析
5.1 时频响应
机车转子系统中齿轮啮合和轴承支撑都是非线性影响因素,整个系统为较复杂的非线性多维方程,因此不必要进行解析求解,在此通过MR-K线性迭代法求解非线性机车双转子系统。本文根据机车CRH轮对转子作为研究对象,给定系统参数:支撑轴系长度为L=2 000 mm,轴截面外径R=200 mm,内径为:r=55 mm,车轮质量m=305 kg,集中惯性质量Io1=18.75 kg·m2,齿轮模数ma=6 mm,齿数z1=34,z2=84,齿宽b=70 mm,齿轮的平均啮合刚度Km。
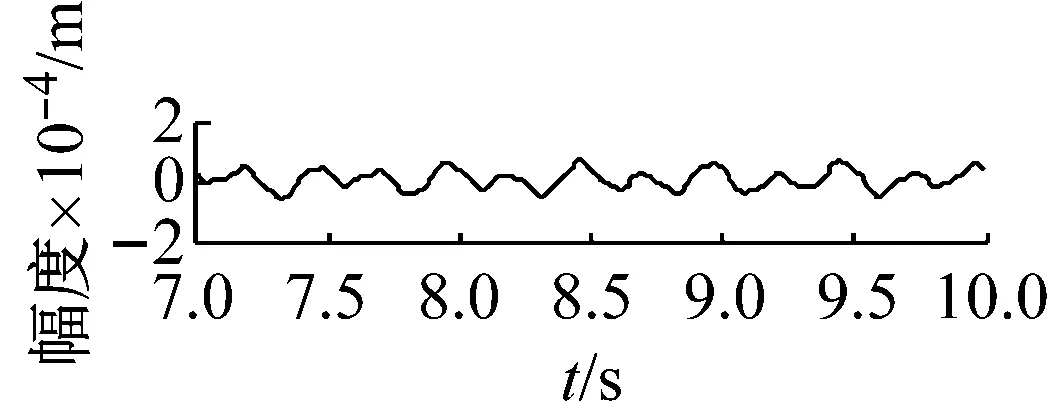
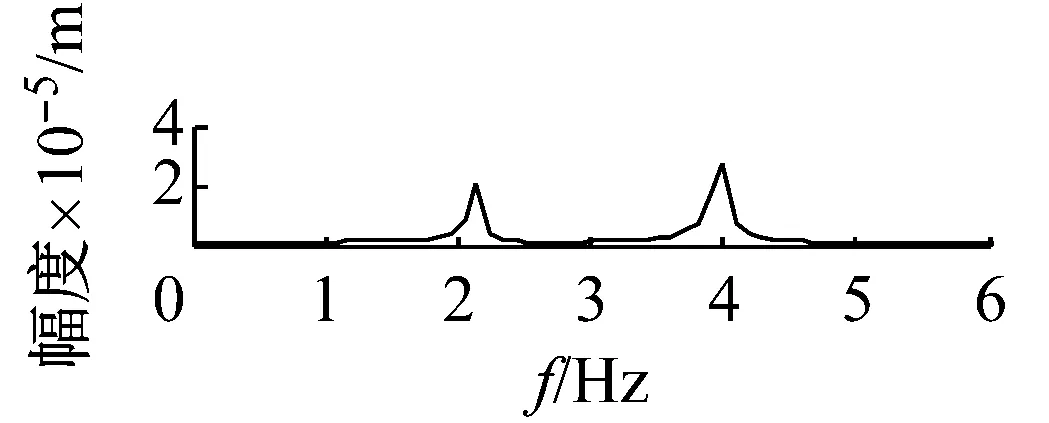
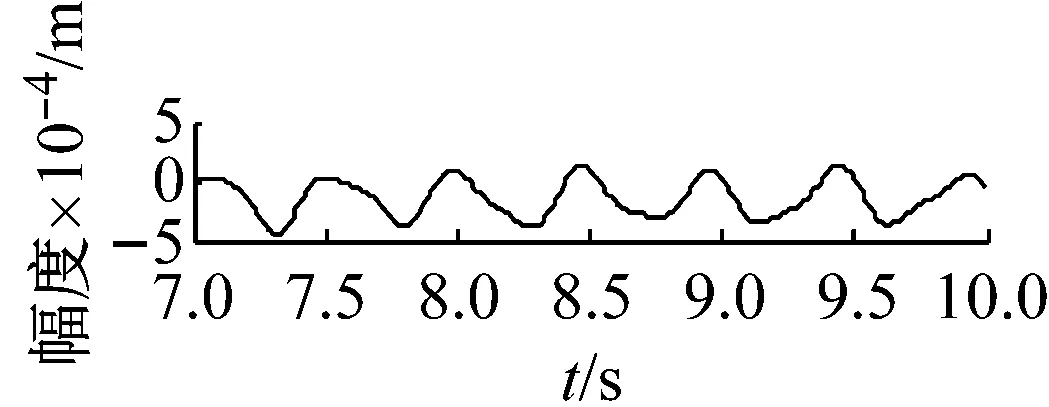
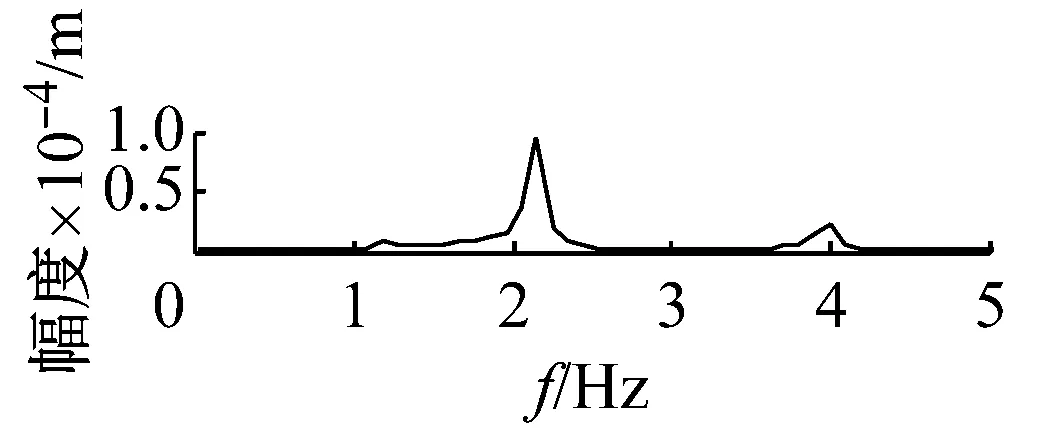
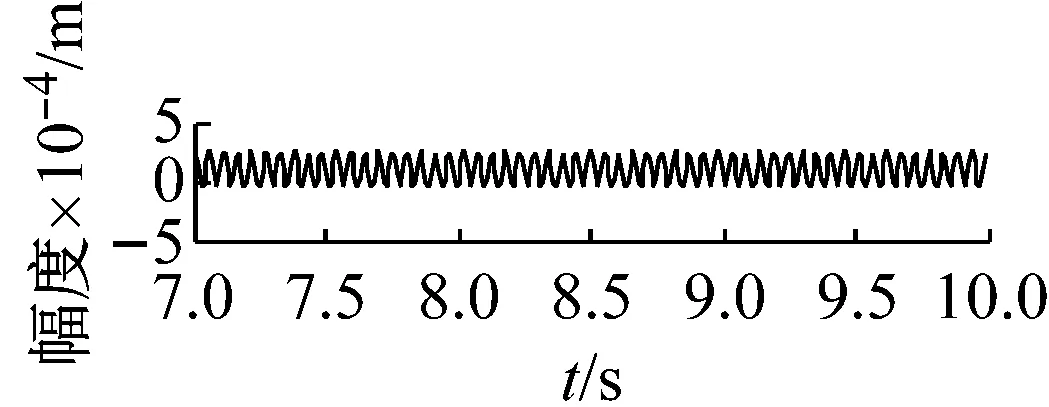
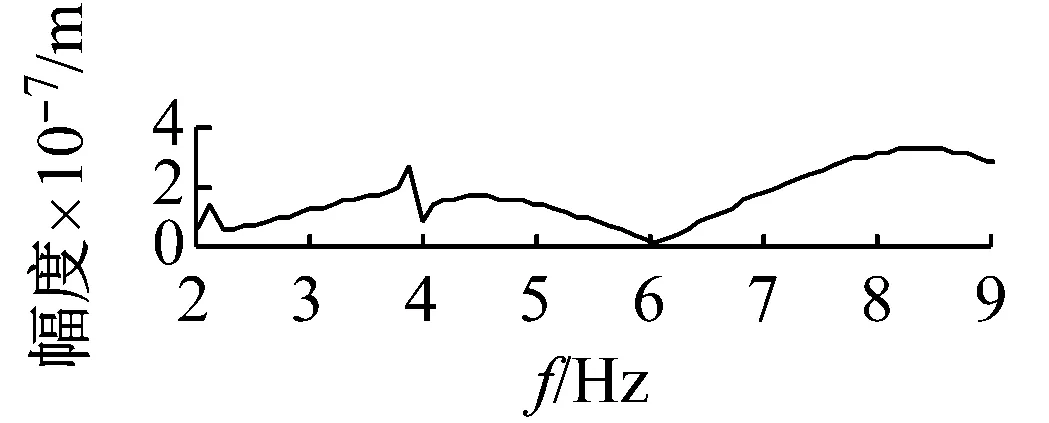
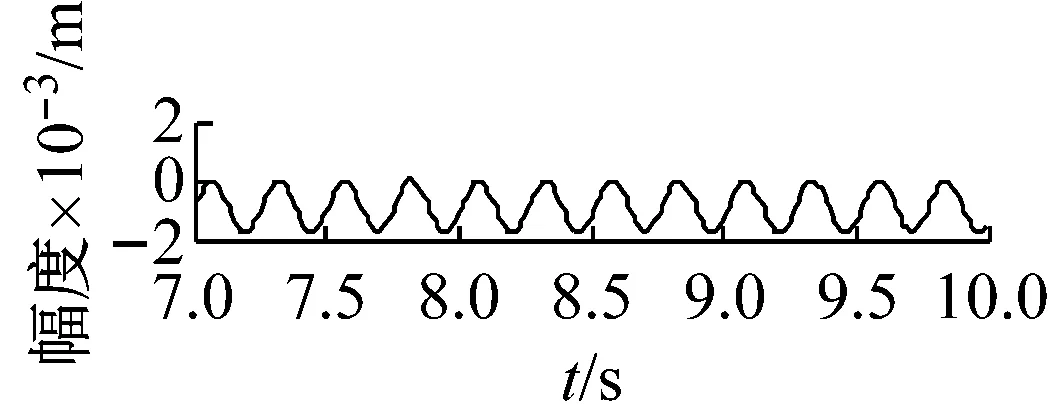
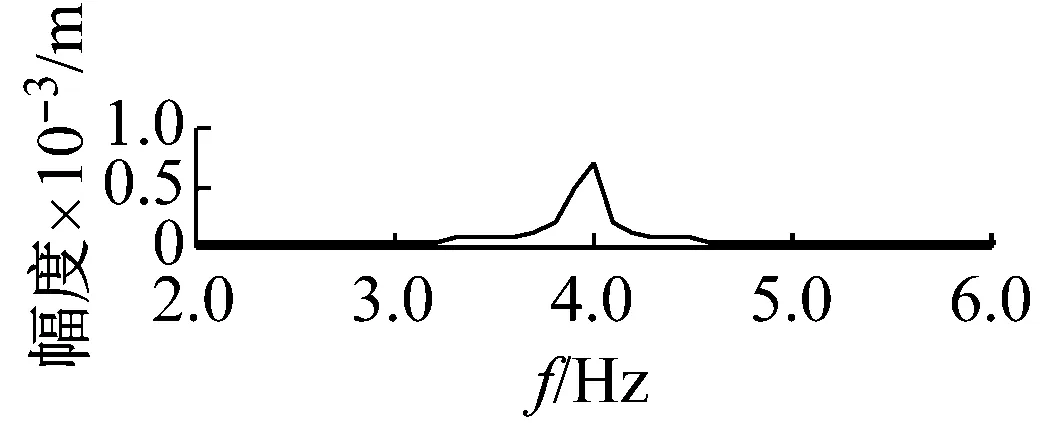
机车转子受齿轮啮合刚度及轴承刚度阻尼、轨道激励作用下,系统响应和频域分析分别如图7~图12所示。取Ω=ω时,图7时间幅值响应可知,主轴转子纵向振动较小,振动频率成分较多。幅频响应可知,频率f1=2.1 Hz及f2=4 Hz时,出现较大的主轴纵向峰值变化。其中,f1为系统一阶固有频率值,而f2为啮合频率。图中,f3=8.3 Hz及f4=9.2 Hz二倍周期频率值时幅值出现较大变化。图8时间幅值响应可知,主轴转子横向振动较大,齿轮啮合刚度影响下,响应峰值变化较明显。幅频响应中,系统频率f1及f2时,出现明显主轴横向峰值变化。图9时间幅值响应可知,从动轴转子纵向振动较小,振动比较单一。幅频响应图中,频率f5=1.2时,受轮轨随机激励作用,幅值有明显变化。图10时间幅值响应可知,受啮合刚度影响下,系统从动轴转子横向振动较大。幅频响应图中,固有频率f1时,响应幅值较大。图11响应可知,主动轴扭转角频率成分较多,响应变化较大。图12从动轴扭转转子横向振动较大。幅频响应图中,齿轮啮合频率f2时,响应幅值较大。
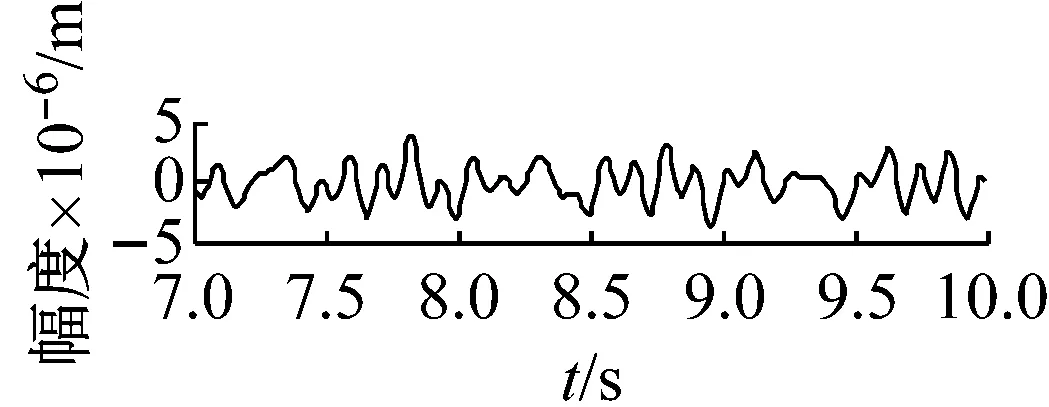
(a) 主动轴v向时程响应
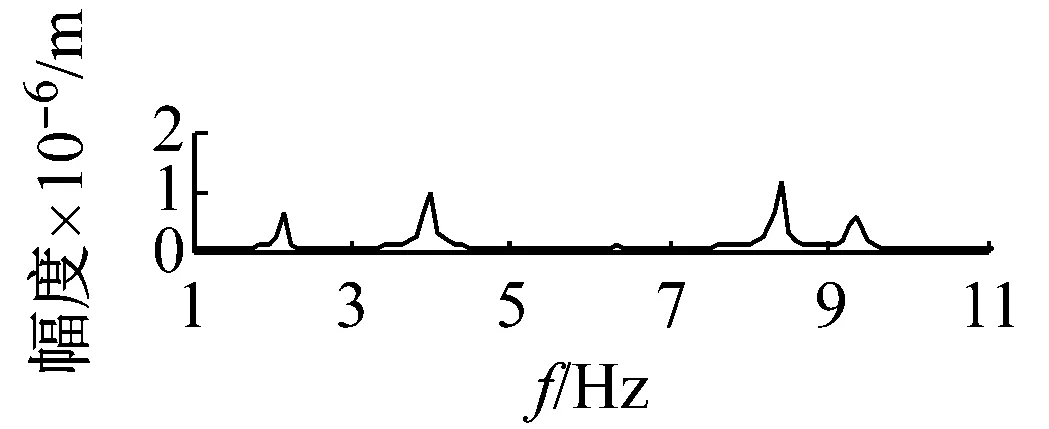
(b) 主动轴v向的频谱图
(a) 主动轴w向时程响应
(b) 主动轴w向的频谱图
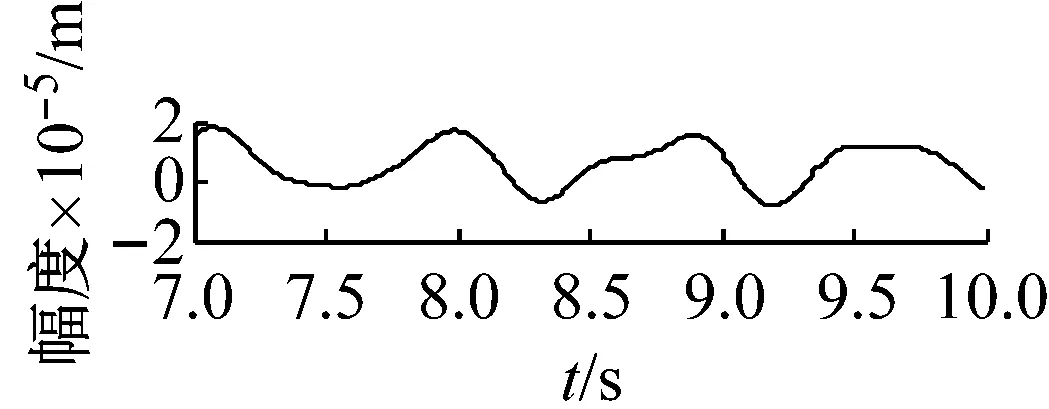
(a) 从动轴v向的时程响应
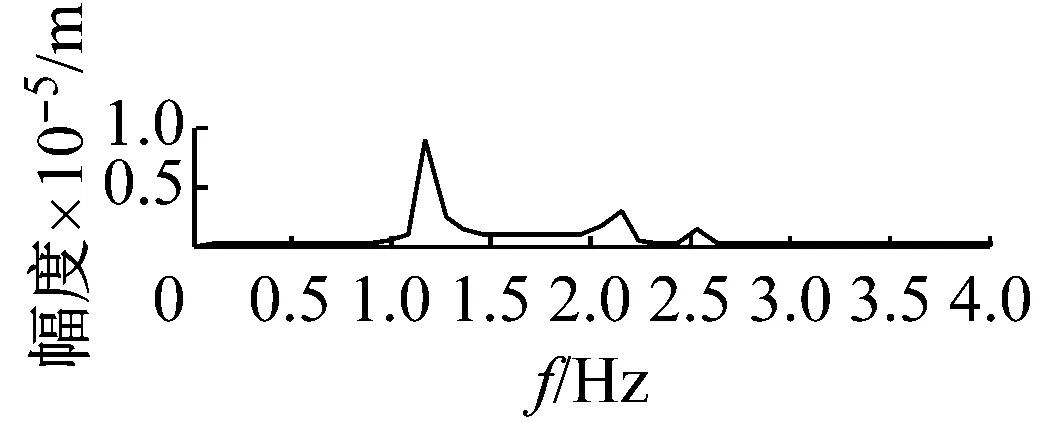
(b) 从动轴v向的频谱图
(a) 从动轴w向的时程响应
(b) 从动轴w向的频谱图
(a) 主动轴扭转角时程响应
(b) 主动轴扭转角的频谱图
(a) 从动轴扭转角时程响应
(b) 从动轴扭转角的频谱图
5.2 参数影响及幅频响应
机车在齿面磨损及点蚀破坏下,齿面均匀磨损变化较小,点蚀面更容易引起啮合刚度的变化。由其早期齿面磨损对啮合刚度影响不大,产生的振动激励很小。这里,选取齿面产生12%的点蚀时,啮合刚度变化约为6%[19]。图13和图14中,由于点蚀作用下齿轮啮合刚度增大,系统一阶固有频率右移,主动轴响应值增大。图15和图16中,点蚀减小,从动轴纵向响应向右移、幅值较小,横向幅值变大。图17和图18中,点蚀导致主动轴固有频率处出现较大变化,对从动轴振动影响较小。
由图19中可知,式(53)中轮轨激励P的增加,主轴转子的幅值开始呈速减小趋势,达到一定值时系统幅值受轮轨激励影响较小。图20中,当轮对磨损及扁疤时,轮轨激励P的增加,从动轴横向幅值减小,轮轨接触较为平缓,随着轮轨激励的不断增加,横向幅值逐渐增大。
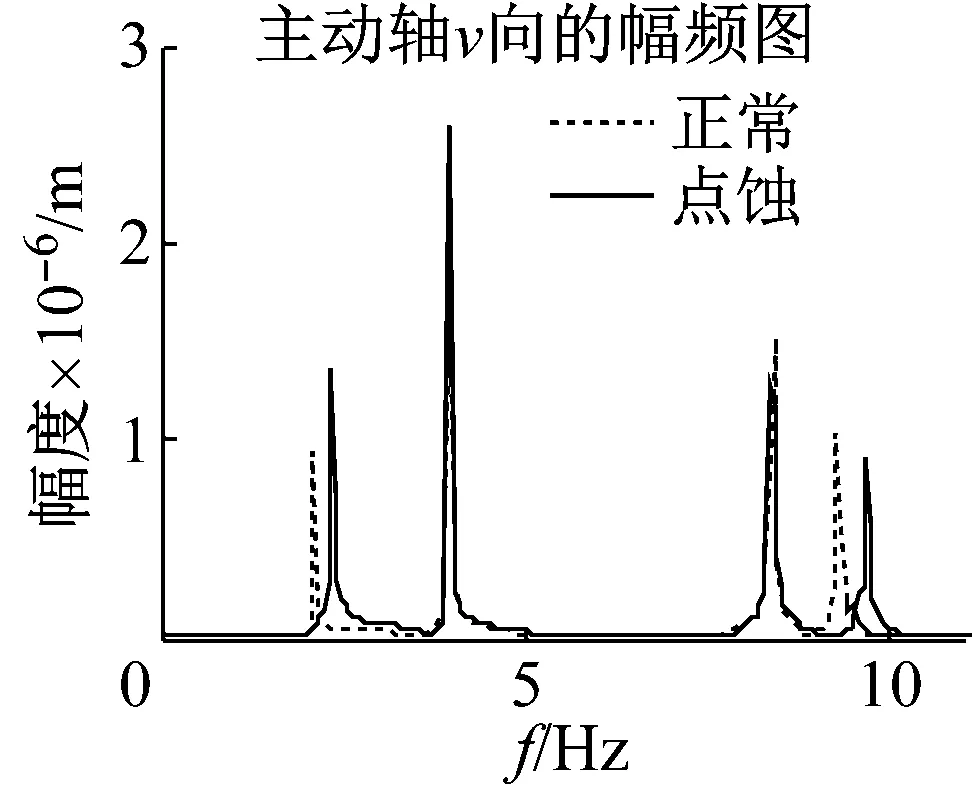
图13 幅频响应
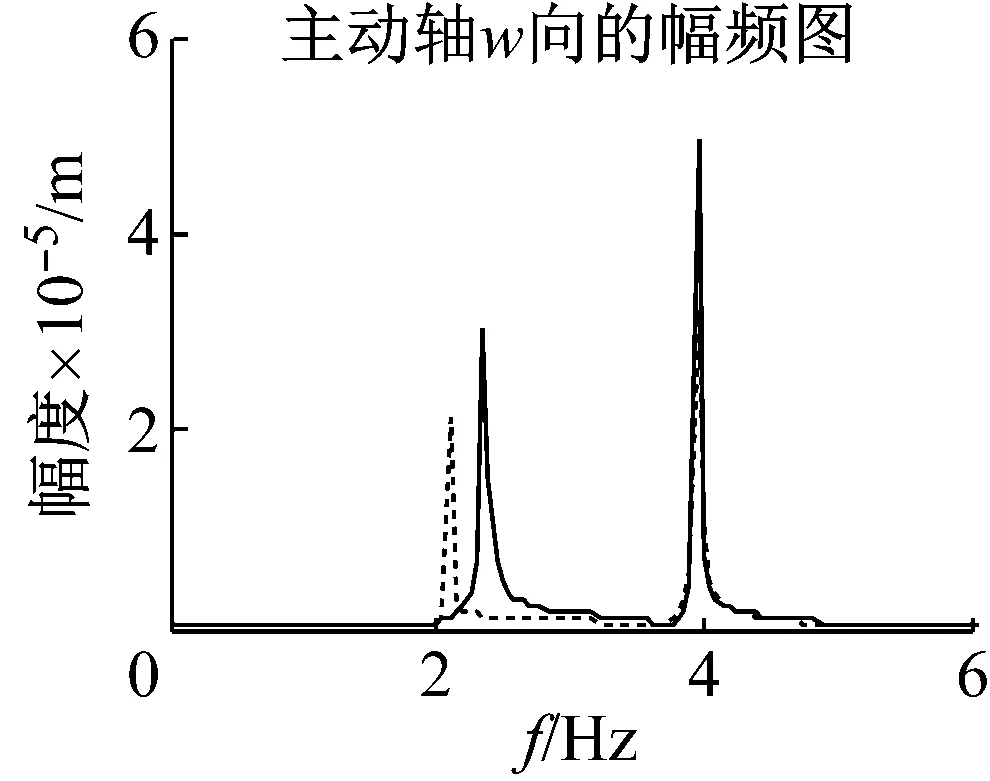
图14 幅频响应
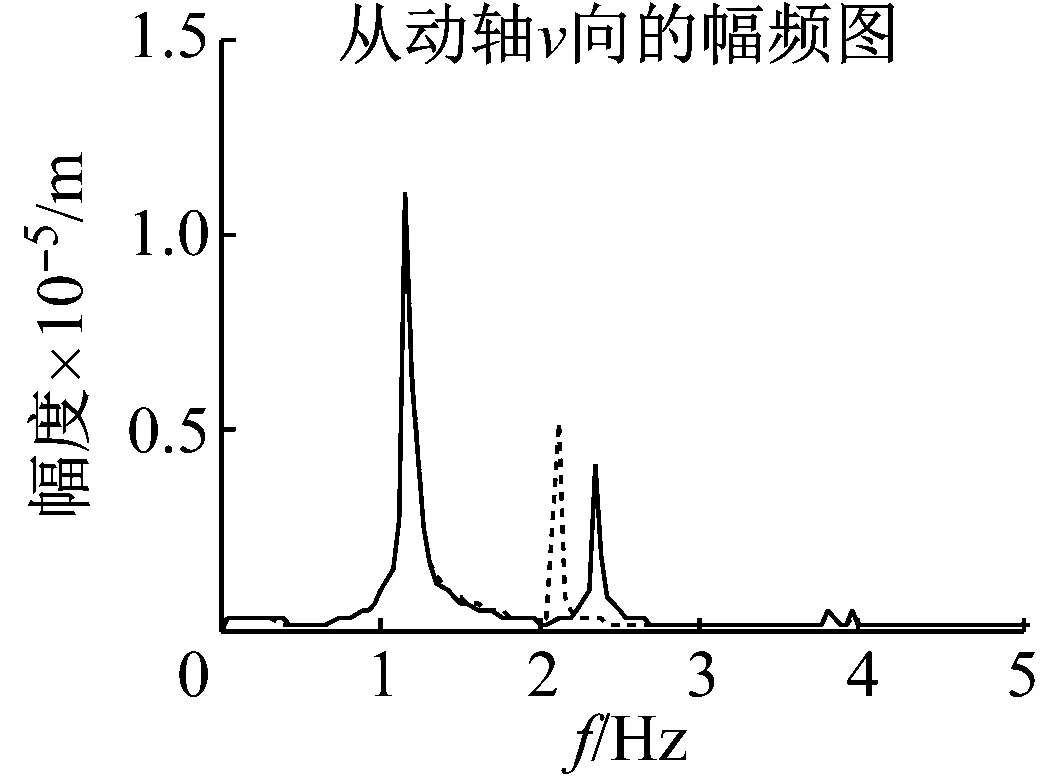
图15 幅频响应
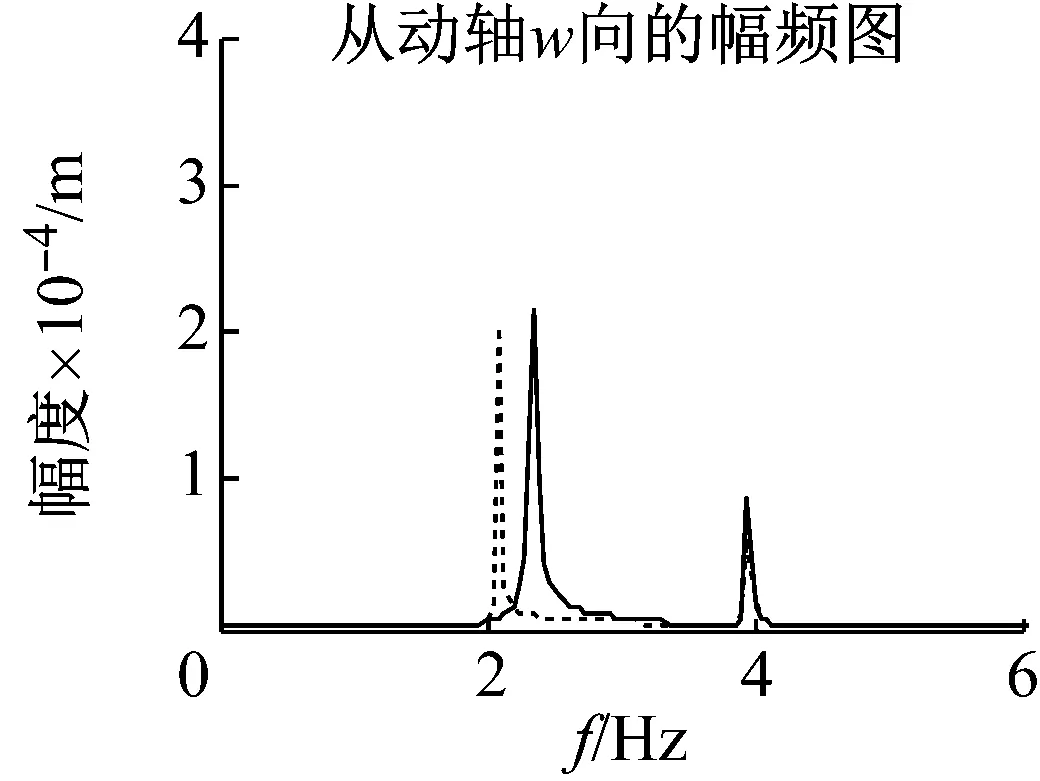
图16 幅频响应
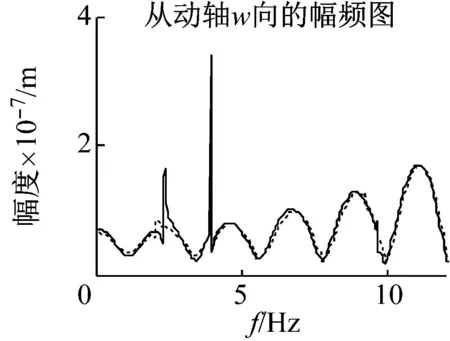
图17 幅频响应
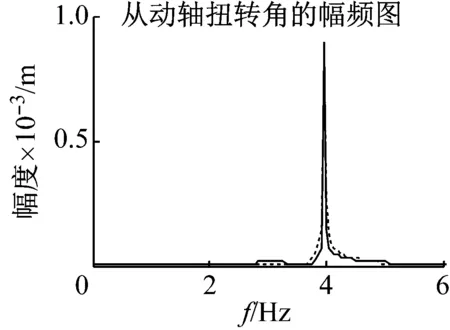
图18 幅频响应
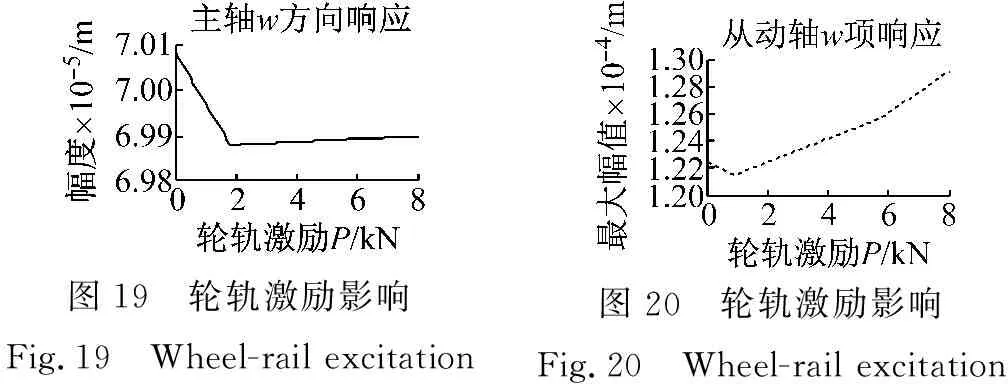
图19 轮轨激励影响Fig.19 Wheel-rail excitation图20 轮轨激励影响Fig.20 Wheel-rail excitation
6 结 论
本文建立了连续质量轴转子传动系统弯扭耦合动力学模型,考虑了非线性齿轮啮合刚度及轮轨接触的影响。求解系统在复杂边界条件下,转子临界转速大小。计算与分析,得出转子系统弯扭耦合的非线性振动特征及系统振动响应规律。
(1) 建立了连续转子模型,能更好的分析轮对、轴、齿轮之间的相互关系及影响。
(2) 复合边界条件下,精确求解转子系统固有频率方程,及其耦合模态值。
(3) 受齿轮啮合刚度下,传动系统纵向横向弯曲幅值变化较为显著,扭转角在其耦合频率幅值较大。点蚀作用下,一阶固有频率右移,主动轴响应值增大。
(4) 轮轨激励P接触耦合作用下,轮轨接触力增大,从动轴横向弯曲变化显著。
总上,机车连续质量轴转子系统模型,不同于传统Jeffcott模型,对铁路机车传动系统动力学分析及齿轮轴承等故障分析提供了很好的动力学模型。
