射弹尾翼数对超空泡流特性的影响
2018-08-24,
,
(浙江理工大学机械与自动控制学院,杭州 310018)
0 引 言
当物体在水下高速运动时,在其周围会产生一个大的蒸汽泡,这就是超空泡现象。超空泡现象使得水下物体的减阻出现跃变,正因为它有这样的特性,所以国内外对超空泡的研究热度从未消退,尤其是在超空泡子弹、鱼雷等军事武器研究领域。国内外学者对超空泡现象的研究由来已久。罗格维诺维奇[1]通过理论分析对头部为圆盘式的空化器的阻力、与其诱导产生的超空泡外形轮廓和空化数之间的关系进行了研究,并结合大量实验进行了验证;Erfanian等[2]基于欧拉-拉格朗日耦合方法,对带有尾翼的半球头型射弹入水过程的超空泡流进行了数值模拟与实验研究;Kadivar等[3]利用VOF方法对带有不同楔角的锥形空化器的三维超空泡流几何特性进行了分析;Kinzel等[4]通过数值模拟与实验相结合,对三维射弹模型的通气超空泡与气体射流间的相互作用进行了研究;施红辉课题组利用高速物体出入水实验设备研究了射弹出入水时超空泡的变化,同时开展了表面带0、2、4、6道凹槽射弹水下超空泡流实验,并与数值模拟结果进行了对比[5-8];Yuan等[9]利用CFD研究了在不同速度以及不同攻角情况下,带有尾舵的航行体的超空泡流和非线性水动力学特性;裴鬃等[10]通过实验,验证了射弹尾翼所处的位置对射弹模型的力学性能以及超空泡尾部闭合机制起着至关重要的作用;Huang等[11]研究了以水冲压为动力的水下高速航行体超空泡流特性,分析了水流量对超空泡的形状以及盘型空化器的阻力系数的影响;易文俊课题组对带有十字型分布的梯形尾翼的水下射弹超空泡流进行了模拟,分析了尾翼对超空泡及其多相流特性的一些影响[12-13];赵成功等[14]研究并分析了不带尾翼和带正交分布的三角形尾翼的射弹模型的水下超空泡流形态和阻力。
目前针对带有尾翼的射弹模型超空泡流场的研究对象主要是正交90o角分布的四尾翼结构,而对带有轴对称的两尾翼和周向60o角均匀分布的六尾翼结构的研究还很缺乏,因此研究射弹尾翼数对超空泡的影响很有必要。本文分别对带有0、2、4、6尾翼高速射弹的超空泡流场特性进行了三维的数值模拟,分析了射弹尾翼数与超空泡特性之间的关系,为相关型号的设计提供了参考。
1 数值模拟方法
1.1 控制方程
本文根据质量与动量守恒原理,将连续性方程和动量方程相结合,对带不同尾翼数射弹的超空泡流特性进行数值模拟,湍流模型采用标准k-ε模型,对近壁面的处理选用标准的壁面函数,空化模型采用Schnerr-Sauer模型。
连续方程和动量方程如式(1)—(2)所示:
(1)
+SM
(2)
其中:ui为混合介质体i方向的速度分量,uj为j方向的速度分量;P为混合压力;μ为混合介质体的动力粘度;SM为附加的源项;ρ为混合介质体的密度,其定义为:
ρ=αvρv+αgρg+1-αv-αgρl
(3)
其中:αv为水蒸汽相的体积分数;下标l(liquid)表示液相、g(gas)表示气相、v(vapor)表示水蒸汽相。
标准k-ε湍流模型[15]是最典型的两方程湍流模型,通常用vt(涡粘性系数)表示,其定义为:
(4)

k的运输方程为:
(5)

ε方程经过模化后得到的最终表达式为:
(6)
其中:Cε=0.07~0.09;Cε1=1.41~1.45;Cε2=1.91~1.92。
对各体积分数项的计算是用Schnerr-Sauer空化模型[16],表达式可用式(7)—(9)表示:
(7)
(8)
(9)
其中:Me为冷凝后蒸气质量;Mc为水蒸腾质量;RB为单个蒸气泡的半径。
1.2 射弹模型、边界条件与网格划分
射弹模型参照易文俊等[17]的射弹模型,分别由空化器、圆锥段、圆柱段、尾翼四部分组成,其中空化器直径为3.0 mm,尾翼的厚度为1.0 mm,射弹的长为75.0 mm,六尾翼射弹模型的三维示意如图1所示,纵截面尺寸如图2所示。定义射弹总长为L1,以射弹头部中心o点位置为坐标轴原点。
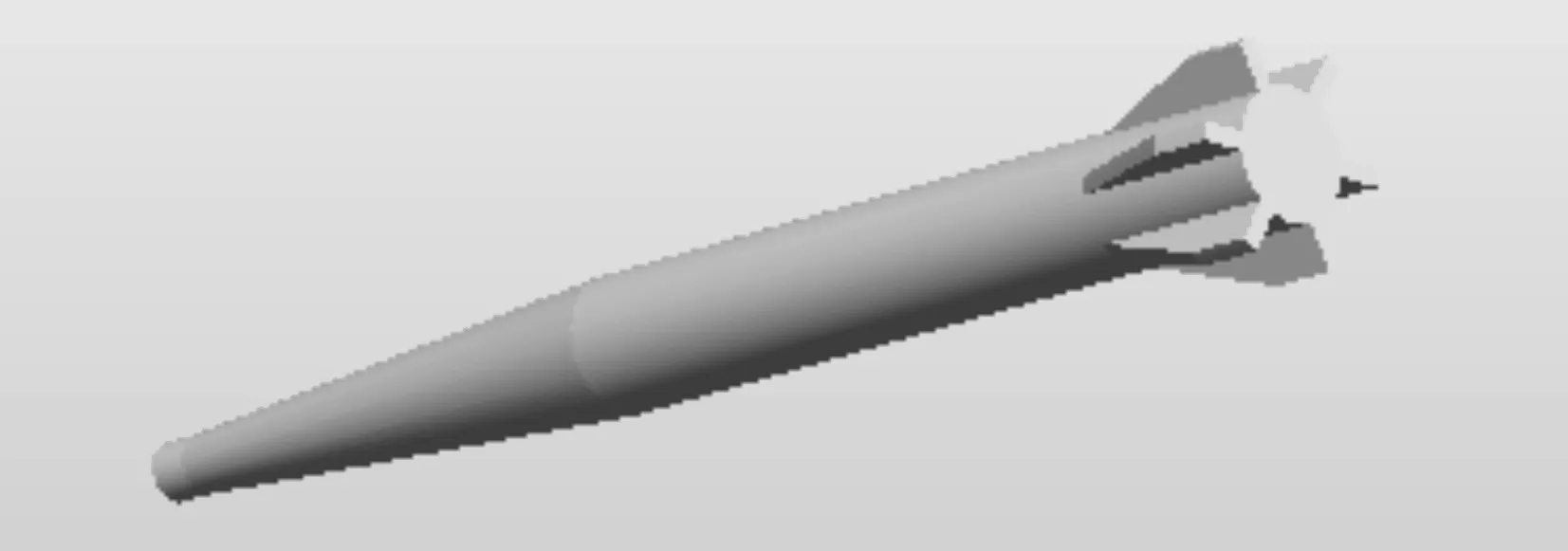
图1 射弹模型的三维示意
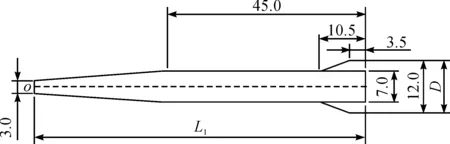
图2 射弹模型的纵截面尺寸示意(单位:mm)
本文采用一个方形计算域,将翼展的高度定为D,如图2所示,则计算域的尺寸为100/3D×50/3D×50/3D,射弹的水平中心线与方形计算域的水平中心线相重合,计算域左端即来流方向定义为速度入口边界条件,右端为压力出口边界条件,四周采用无滑移壁面边界条件,射弹头部距速度入口为20/3D,具体如图3所示,来流速度大小设定为200 m/s。
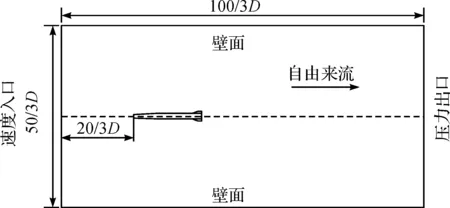
图3 边界条件及流场参数示意
在ICEM CFD中采用六面体结构化网格,对带有0、2、4、6尾翼射弹模型和计算域进行分块后再进行网格划分。为了更加精确地模拟出射弹近壁面及周边的流场特性,通过标准壁面函数处理外同时在射弹表层和附近的网格进行了局部加密处理。考虑到计算效率加密方法采用指数式增长,即距射弹表面第一层网格开始网格逐渐由密变疏,得到的网格总数依次为1227932、1277436、1277854、1234388。图4给出了计算域网格划分示意。图5(a)-(d)给出了不同尾翼数的射弹模型表面的网格划分示意。
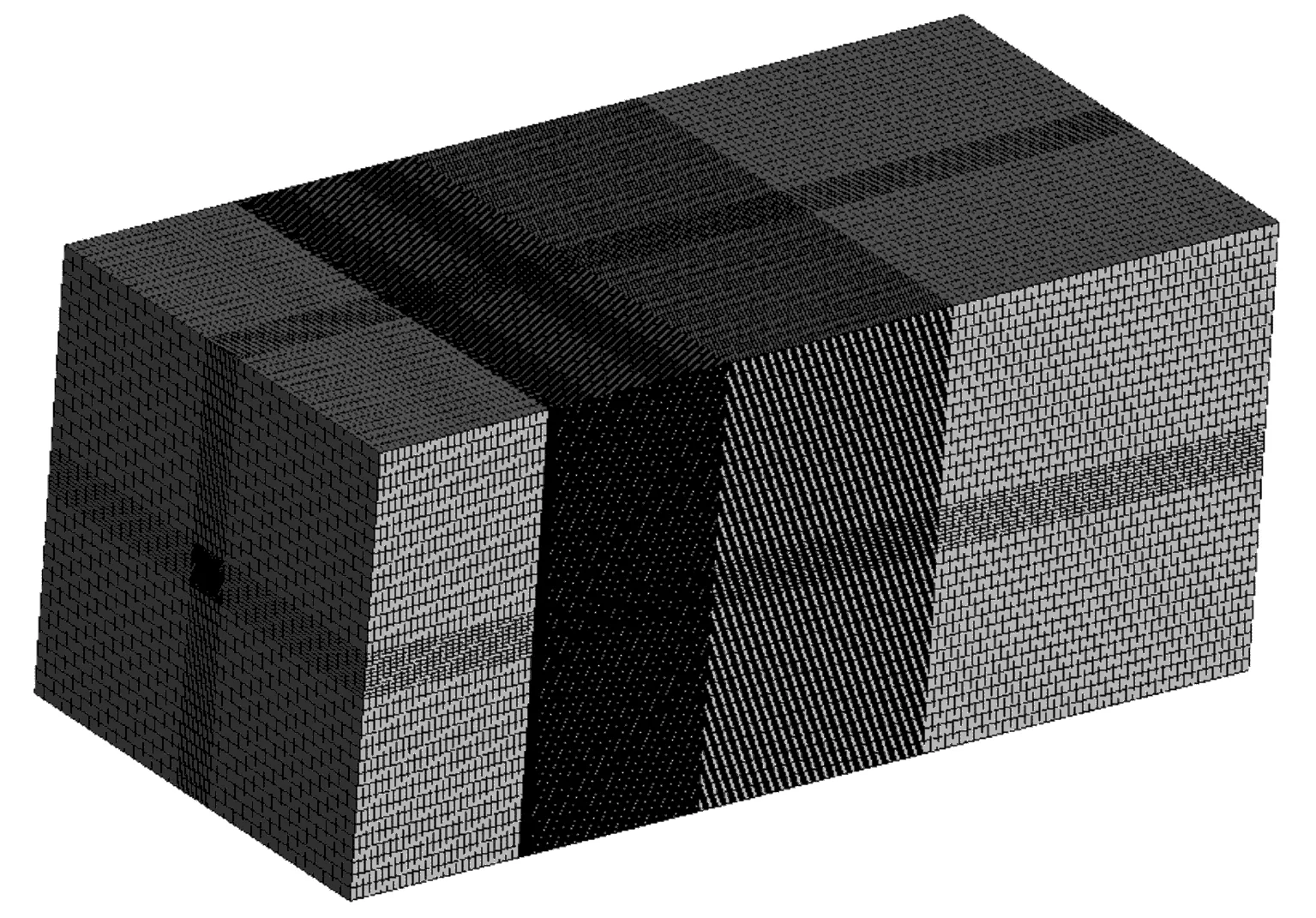
图4 计算域网格划分示意

图5 不同尾翼数射弹模型网格划分示意
2 数值模拟结果及分析
2.1 数值模拟方法有效性验证
本文通过CFD求解器Fluent模拟了不同尾翼数射弹的超空泡流特性,这里以不带尾翼的射弹为代表来进行数值模拟方法有效性验证,射弹的速度大小为200 m/s。Logvinovich[18]通过理论与实验相结合对超空泡的直径和长度提出的半经验公式如式(10)-(11)所示:
(10)
(11)
其中:Cx0=0.827;k为经验常数取值范围为0.96~1.00。式(10)-(11)仅适用于空化数σ在0~0.25之间的自然超空泡状态。本文算例的空化数σ=0.00488。结合式(10)-(11)由超空泡独立膨胀原理得出如下超空泡的几何形态公式为:
(12)
不带尾翼射弹超空泡无量纲直径与经验公式对比的曲线如图6所示,从图中可以看出,不带尾翼射弹形成的超空泡无量纲直径随无量纲位移的增加而增大,本文选取了几个不同时刻下的超空泡外形参数来比较,在t=0.6、0.8、1.0 ms时超空泡的外形轮廓与Logvinovich理论公式得出的轮廓的发展趋势相同,而且随着时间的推移,计算结果与半经验公式更吻合。这表明了数值模拟方法的有效性。
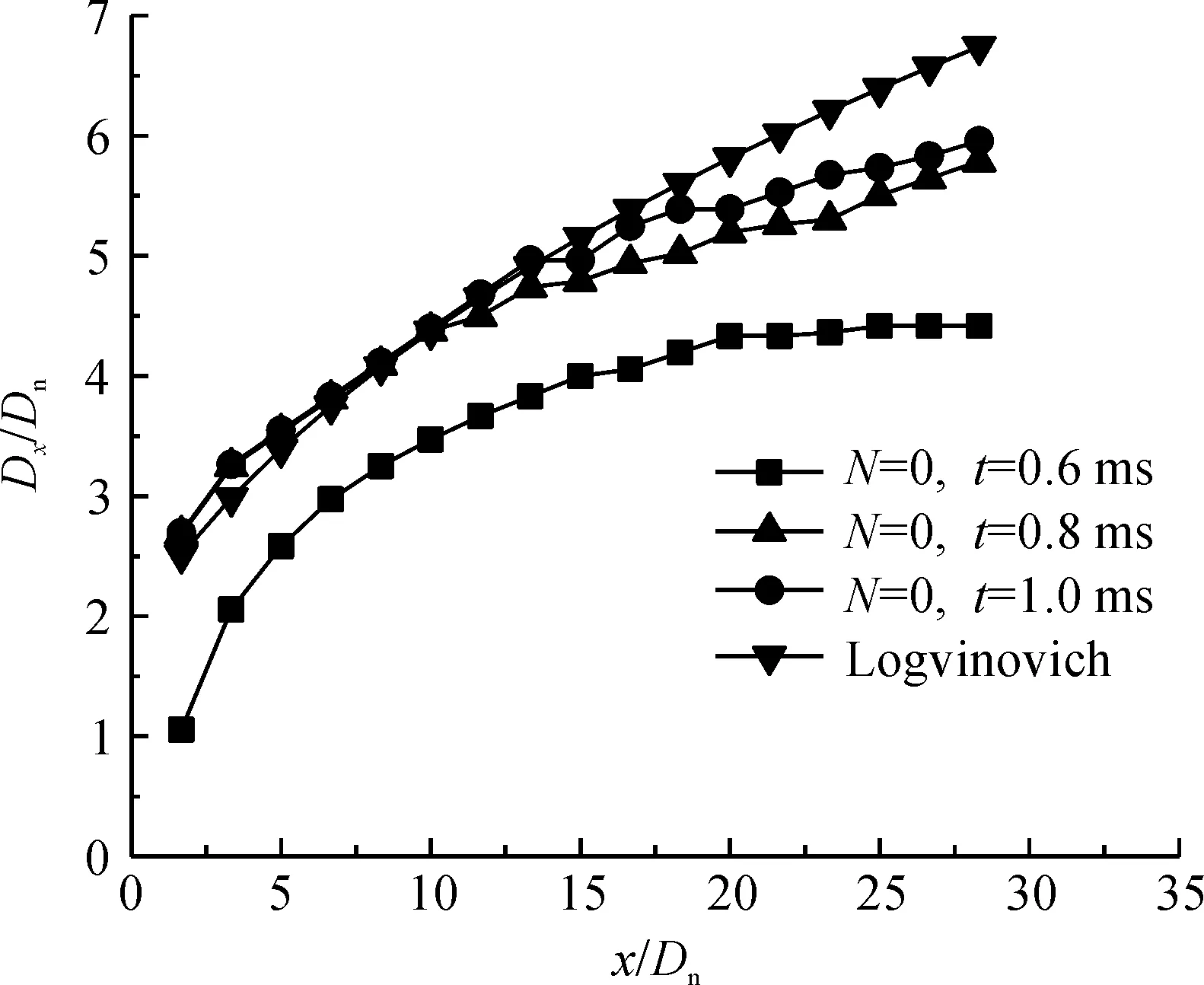
图6 不带尾翼射弹超空泡无量纲直径与经验公式对比的曲线
2.2 网格无关性验证
考虑到网格数量的差异可能会对计算结果产生影响,选取不带尾翼的射弹模型来进行网格独立性验证,在相同的模型尺寸与计算流域条件下,对其进行了三种网格密度划分,得到的网格数量分别是90万、120万、160万左右。将模拟结果用CFD-POST后处理再采集数据,绘制曲线,如图7所示。由图7可知,中密度的网格与高密度的网格所计算出的无量纲直径基本相同,考虑到计算效率,因此本文最终选择的网格数为120万左右以便保证很好的计算精度。

图7 不同网格密度下无量纲直径随无量纲位移变化的曲线
2.3 带0、2、4、6尾翼的射弹的超空泡的形成过程
图8-图11是带不同尾翼数的三维超空泡从初始生成到逐渐发展的水相图。每幅图给出的都是从0.1~0.6 ms时序段的空泡形态,相邻两幅图之间的时间间隔是0.1 ms,主要由两个部分组成,(a)为三维超空泡水相图,(b)为超空泡(中心线位置)纵截面水相图。
从图8-图11可以看出,射弹在水下以200 m/s高速运动时,超空泡开始从弹体头部、肩部、尾部同时生成,在t=0.1 ms时能清晰地看到形成的局部空泡包裹着部分弹体。随着时间的推移,空泡逐渐沿着射弹表面在其周围进行扩展;当t=0.3 ms时,弹体头部和肩部空泡开始融合在一起并向尾部移动,与此同时尾部空泡继续向后延伸;当t=0.4 ms时,弹体头部、肩部、尾部三部分空泡交汇在一起,此时整个射弹只有一小部分裸露在外面;当t=0.6 ms时,整个射弹周围已经被一个完整的大气泡所包裹。同时,通过定性分析可知:不同尾翼数射弹的超空泡发展过程区别不是很明显,且当射弹带有尾翼时,在射弹尾翼前形成的超空泡表面呈光滑状,但在射弹尾翼后面的超空泡表面开始出现波动且变得粗糙,这可能是由于尾翼影响的缘故。
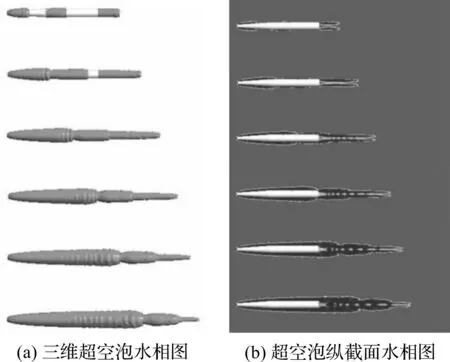
图8 带0尾翼射弹超空泡发展的水相图
图9 带2尾翼射弹超空泡发展的水相图
图10 带4尾翼射弹超空泡发展的水相图

图11 带6尾翼射弹超空泡发展的水相图
2.4 尾翼对超空泡形态特性的影响
图12分别给出的是0、2、4、6尾翼射弹被一个完整超空泡所包裹时,沿下游方向不同位置处的横截面水相图。以射弹头部中心位置处为原点,0.75L1位置为超空泡受尾翼干扰的起始位置。如图12(a)-(d)所示,同一射弹在不同位置处超空泡形状基本相似,当射弹不带尾翼时形成的超空泡横截面图近似为圆形;当射弹带有尾翼时,尾翼会对超空泡形状产生一定的干扰,即在沿尾翼方向上空泡形状向外凸起,在尾翼之间空泡形状向内凹陷。这种变化随着尾翼数的增加会变得更明显。

图12 带不同尾翼数射弹在不同位置处超空泡横截面水相图
本文在CAD中测量了t=0.6 ms时形成完整超空泡的不同位移处,超空泡的最大直径以及在不同时刻下超空泡的最大长度,将两者进行无量纲化处理,不同尾翼数下超空泡轮廓随无量纲位移变化的曲线以及超空泡的无量纲长度随时间变化的关系曲线如图13-图14所示。从图13可以看出,随着尾翼数的增加超空泡的轮廓呈现逐渐增大的趋势。从图14可知,随着时间的增大超空泡的无量纲长度逐渐增加,同时随着射弹尾翼数的增加,超空泡的无量纲长度也呈现递增的趋势。赵成功等[14]利用数值模拟发现无尾翼射弹诱导的超空泡的直径与比长度较有尾翼射弹的小,这与本文模拟结果相一致。本文所测量的空泡截面,都是如图2所示的纵截面(截面通过了上下两个尾翼)。
图13 带不同尾翼数射弹超空泡轮廓随无量纲位移变化的曲线
图14 带不同尾翼数射弹超空泡无量纲长度随时间变化的曲线
2.5 射弹阻力特性分析
射弹阻力系数Cd如式(13)所示:
(13)
其中:F为总阻力;V为来流的速度;s为射弹特征面积具体是取射弹圆柱段的横截面积。图15给出了不同尾翼数射弹阻力系数随时间的变化关系。从图15中可以发现,当t小于0.5 ms时,随着时间的增加,射弹受到的阻力都急剧下降,与此同时尾翼数越多,射弹在水下所受的阻力也会越大,前者是由于在弹体周围空泡在逐渐生成和发展,局部弹体处于空泡中使摩擦阻力大大降低,后者是因为此时超空泡还未完全包裹弹体,尾翼刺破空泡,尾翼数越多,与水沾湿面积也会越大故阻力也随之增加。当t大于0.5 ms时,超空泡已经完全包被整个射弹,因此对不同尾翼数射弹而言,它们受到的阻力基本保持不变。
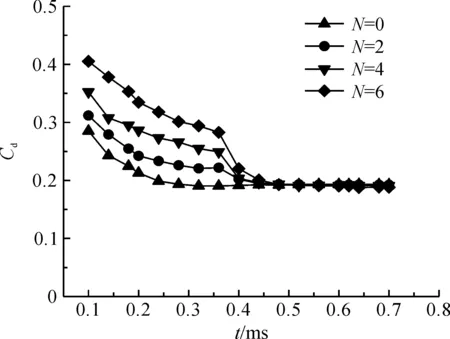
图15 带不同尾翼数射弹阻力系数随时间变化的曲线
3 结 论
本文通过数值模拟对三维的带不同尾翼数的射弹的超空泡流特性进行了研究,得出了尾翼数对超空泡几何形态和射弹阻力特性的影响规律,主要的结论如下:
a) 无尾翼与带不同尾翼数射弹超空泡的发展过程没有明显的区别,但由于尾翼的存在会对超空泡形状造成扰动,且尾翼数越多,扰动也会越明显;另外,在射弹尾翼后的超空泡表面开始变得粗糙。
b) 在同一高速状态下,随着尾翼数的增加,超空泡的轮廓和无量纲长度会呈现增大的趋势。
c) 尾翼数的增加使得射弹与水沾湿面积增大,在超空泡未完全形成前其阻力与尾翼数成正比关系,当形成完整的超空泡后其阻力将基本保持不变。
