内置式永磁同步电机的无位置传感器控制研究
2018-08-21李政魏峥嵘李祥夏俊
李政,魏峥嵘,李祥,夏俊
(华南理工大学 电力学院,广东 广州 510640)
0 引言
与传统的需要无功励磁电流的电机相比,转子为永磁体的PMSM电机,功率因数得到显著提高。随着近些年电力电子变频技术的飞速发展,具有这些优良特性的电机更加广泛地应用于各种工业和生活场合中[1-3]。本文主要讨论的是具有正弦波反电动势波形的永磁电机。其无传感器控制方法相对复杂,需要得到电机转动的实时位置信息。由于三相定子绕组也是在任何时候都处于励磁状态,这也增加了角度估算的难度。因转子结构的不同又分为面装式和内置式。前者由于不具有凸极性,只需通过传统的反电动势观测算法即可实现角度估算,而后者的交直轴电感不同,造成估算的复杂度增加,很难直接估算。为此,本文在前人的研究基础上,对数学模型做优化处理,推导出估算模型,引出了扩展反电动势项,并且详细描述了整个闭环估算方法的实现过程,为同行的学习及研究提供了一定的设计参考。
1 内置式永磁同步电机的凸极性
内置式永磁同步电机的凸极性来源于转子的特殊结构,它的d轴主磁通穿过两个永磁体,这相当于在直轴磁通路径上串联两个气隙,而q轴主磁通只穿过铁心,磁通路径如图1所示。
电感与磁导率的关系:
(1)
其中:μ是磁通路径上不同段材料的磁导率;N是绕组匝数;S是截面积;Len是计算电感时的磁路长度。由式(1)可知,电感L正比与磁导率μ。也就是说磁导率越大,电感越大。
从图1粗线箭头所示的磁通路径可以看出,d轴的磁通路径在铁心内部两次穿过永磁体,而q轴的磁通路径穿过的全都是铁心。永磁体的磁导率和空气大致相等,为0.8~1.21×10-6(相对磁导率为1.0),铁心的磁导率为5.0×10-3(相对磁导率为5 000)。参照式(1)可知,q轴电感大于d轴电感。因此内置式永磁电机具有明显的凸极性[4-5]。通过调整内置式转子的设计参数,利用转子的凸极性,可进行较为灵活的设计,以此来改进电动机的输出和调速特性。也由于这种凸极性,需要在原始面装式PMSM模型的基础上加以改进才能更方便地使用无位置传感器算法。

图1 dq轴磁通路径
2 同步旋转坐标系数学模型
永磁同步电机数学建模是实现无位置传感器矢量控制系统的关键,同时为电机运行稳态、瞬态分析提供了一种有效工具。为了便于系统的分析,在进行数学建模时,忽略各种非线性因素,包括损耗、温度、磁导率等。在d-q旋转坐标系下,内置式永磁同步电机(IPMSM)的模型为[6]:
(2)
其中:Rs是定子电阻,Ld和Lq分别是d、q轴的电感值,ψm是电机的反电动势常量,ωr是电角速度,ud和uq分别是电机实际的定子电压分量,id和iq分别是电机实际的定子电流分量,p是微分算子。
整理式(2),变换为:
(3)
其中λ=ΔL·(ωrid-piq)+ψmωr,定义λ为扩展反电动势[7];ΔL=Ld-Lq。
3 基于扩展反电动势的位置观测器
3.1 估算的旋转坐标系下的模型
如图2所示,d-q坐标系是电机实际所处的正交同步旋转坐标系,γ-δ坐标系是估计的旋转坐标系,θerror是两个坐标系之间的误差角,根据图示可得变换后的电机模型为:
(4)
其中,λ的定义同上一节。
通过上述的变换可见,可以将转子的位置信息提取出来,使其只出现在式(4)等号右侧第二项中,只要对该项进行的信息进行处理即可得到准确的转子位置角[8]。
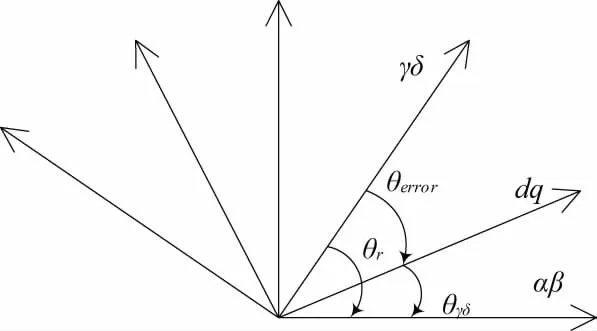
图2 估算的与实际的旋转参考坐标系
根据上述等效变换后的IPMSM数学模型,构建了反电动势观测器,其方框图如图3所示。其中观测器的补偿项由一个标准的PI控制器替代,其输出分别为eγ、eδ。
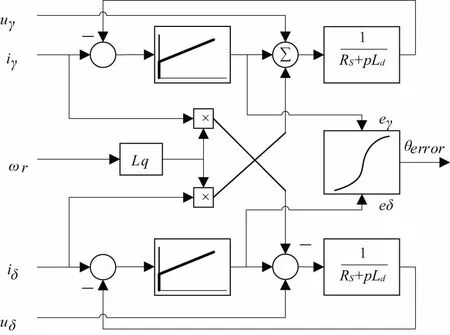
图3 用于扩展反电动势估计的定子电流观测器
该反电动势观测器的输出是两个旋转坐标系之间的估计误差角,利用反正切函数可直接计算出此误差角:
(5)
3.2 位置角跟踪
当带有θerror项的表达式被提取出来以后,位置估计就变得非常简化。如图4所示,只要调整误差项,使θerror=0,即位置偏差角为0,就可以实现两个坐标系的完全重合。这一过程是通过锁相环机制实现的,其中的环路补偿器保证了转子磁链位置跟踪的正确性[9]。

图4 位置估计的锁相环框图
经过以上的位置估测算法之后,由锁相环后一级的积分器就可以得到准确的转子位置角。
4 系统仿真与验证
为了测试本文所提出方法的性能,根据上述提出的d-q旋转坐标系下的电机数学模型及其位置观测器算法,在Simulink环境下进行仿真试验。仿真模型中,电机的参数如表1所示。
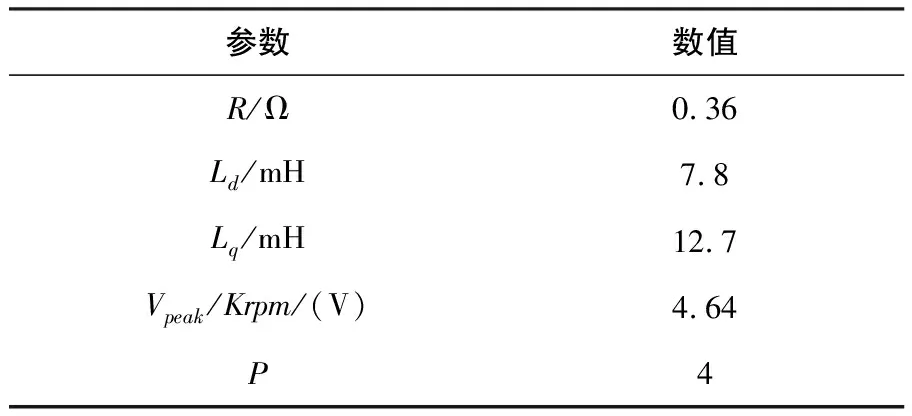
表1 仿真所用电机的参数
图5就是本文所建立的仿真模型,其中的SVPWM模块是空间矢量调制算法。该控制系统采用的是id=0的转速电流双闭环控制。其中Extended BEMF Observer模块是根据图3所示的观测器搭建,PLL模块是根据图4所示的锁相环结构搭建[10]。
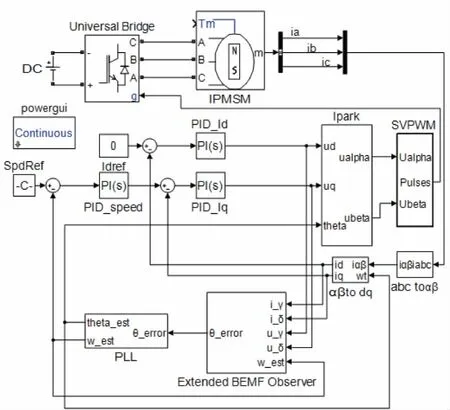
图5 采用扩展反电动势算法的矢量控制系统

图6 转子位置角估计
仿真结果如图6和图7所示。图6中,从上至下分别表示的是转子位置角实际值、估计值和二者之间的误差值。可以看到,从电机启动的第3个电角度周期开始,也就是t=0.03s之后,位置估计已经非常准确。在电角度周期切换期间会有一个2π的跌落值,这是由于在整个闭环系统中所用到的控制器的相移作用,可以通过引入滤波器的方法来补偿。图7所示的是根据估算出来的转子位置信息反馈到转速闭环后,电机转速的上升曲线。可以看出,该位置估计算法能保证电机的正常运行,转速稳定之后基本无净差。
5 结语
永磁同步电机一直被大量应用于高性能伺服控制系统中,但这种高性能需要高精度的位置和速度传感器来保障。传感器的使用降低了系统开发难度与周期,却增加了极大的成本和器件故障率。因此,随着无传感器技术的不断演化,在一些家用或民用设备中,可以将这种优势利用起来,实现成本与性能的双重优势。本文通过对于电机数学模型的分析,推导出了基于d-q两相旋转坐标系的扩展反电动势模型,通过实时对比估测的坐标系与实际的坐标系之间的误差角,经过锁相环模块,使该误差趋近于0,从而达到转子位置角精确估算的目的。仿真结果证明了该方法的可靠性与优越性,也为后续的研究工作奠定了基础。
