参数不确定关联模糊大系统的稳定性及控制
2018-08-06邵启文王五桂张兰勇
邵启文,王五桂,张兰勇
(1.哈尔滨工程大学 自动化学院,哈尔滨 150001) (2.中国舰船研究设计中心,武汉 430064)
随着现代技术的发展, 大系统的研究越来越受到重视, 如经济系统、生态系统、社会系统等. 由于大系统在现实社会中的重要意义, 许多学者进行了大量的研究并取得了一系列具有重要意义的研究成果[1-6].
大系统建模和控制的一个最大的问题是对系统认识程度的问题. 由于系统的复杂性, 很多参数和模型很难准确获得[7-9].文献[10-11]在模糊集理论基础上建立和发展起来的T-S模糊模型在大系统建模和控制方面的应用.文献[12]采用并行分布补偿算法(parallel distributed compensation, PDC) 和线性矩阵不等式(linear matrix inequalities, LMI) 研究T-S模糊模型描述的大系统的稳定性和控制问题; 文献[13]针对一类非线性系统, 建立T-S模糊双线性系统模型, 给出了系统全局稳定性条件. 但是文献[12]考虑的模型中的参数是确定的, 文献[13]研究了单个系统, 没有考虑各子系统之间的关联情况. 实际上, 由于大系统的复杂性和人们认识的模糊性,大系统模型中的参数往往是不确定的, 且各子系统之间的关联性也是存在的. 对参数不确定关联大系统的控制, 目前主要采用的方法是设计PDC控制器, 如文献[14]研究了一类采用T-S模糊模型描述的大系统的渐进稳定性问题, 并设计了PDC控制器. 对PDC控制器的设计, 上述文献都是采用MATLAB里的LMI工具箱来求解线性矩阵不等式.
文中研究不确定模糊关联大系统的稳定性及控制问题, 所考虑的模糊大系统由多个相关关联的T-S模糊模型组成, 且参数不确定性以范数有界的形式出现在系统的各个系统矩阵、输入矩阵及关联矩阵中[15-16].根据李雅普诺夫稳定性理论,提出线性状态反馈控制器设计方法, 给出保证不确定模糊关联大系统闭环渐进稳定的定理, 控制器求解不需采用MATLAB里的LMI工具箱. 从算例仿真结果发现, 所设计的控制器具有结构简单, 控制有效的优点.
1 问题描述


Then:
(1)

但由于大系统的复杂性和人们认识的模糊性,实际建立的大系统模型参数是存在不确定性的,此时,式(1)变为:
(2)
式(2)中的参数不确定性满足范数有界条件.
将式(2)写成标准全局模型为:
(3)
式中:
(4)
将式(4)代入到式(3)中, 式(3)可写成:

(5)

2 稳定性分析
假设不考虑系统的控制,此时式(1)变为:

(6)
定理1形式如式(6)的模糊大系统渐近稳定, 如果存在正定矩阵Pi, 使下面两式成立:

(7)

(8)

证 在不考虑控制项时, 式(3)可表示为:

(9)
设Lyapunov函数为:

(10)
则:

(11)
如果存在正定矩阵Pi, 满足:

(12)
并且:

(13)
式中:λmin为最小特征值.
则:
(14)
由Lyapunov稳定性定理可知, 系统渐近稳定.
3 线性反馈控制器设计
对于大系统的控制,目前通常采用PDC控制器.为了控制器设计的简单化, 文中研究线性反馈控制器设计方法.
假设线性反馈控制器为:
(15)

(16)
对于线性反馈控制器的设计, 要保证系统稳定,需满足下述定理.
定理2如果线性反馈控制器稳定, 则线性状态反馈增益需满足下面的式子:

(17)

(18)

(19)
r=1,2,…,R;m=1,2,…,R;r≠m
(20)

我国体育基金会通常由政府推动而成立,国家体育总局或各省市体育行政部门作为业务主管单位,通常将体育基金会视为体育系统的一部分,从而支持基金会的工作[2]。1986年10月30日,四川省发展职工体育基金会率先成立,成为我国第一家体育基金会,登记类型为非公募体育基金会。次年成立的广东省体育基金会为我国第一家公募体育基金会。30多年来,体育基金会获得了长足的发展,形成了独特的管理和运营模式。
证 定义Lyapunov函数为:

(21)
代入式(13), 并进行计算得到:
(22)
再代入式(18~20)可得:

(23)
由Lyapunov稳定性定理可知, 系统渐近稳定. 于是定理2得证.
通过上面的分析, 可得到参数不确定模糊关联大系统线性反馈控制器设计步骤为:
(1) 由式(4)将参数不确定的系统矩阵以一参数确定矩阵代替;

(24)


(5) 验证求得的结果是否满足式(20), 如果满足, 则由式(15)和式(17)可求得线性状态反馈控制器.
4 仿真算例
以文献[8]中的算例为例, 大系统由3个子系统组成, 每个模糊子系统为:
子系统1:
规则1:
If:x11(t)趋近0, 并且x12(t)趋近0;

规则2:
If:x11(t)趋近0, 并且x12(t)趋近±1;

规则3:
If:x11(t)趋近±1, 并且x12(t)趋近0;
子系统2:
规则1:
If:x21(t)趋近0, 并且x22(t)趋近0;
规则2:
If:x21(t)趋近±1, 并且x12(t)趋近-1;

子系统3:
规则1:
If:x31(t)趋近0, 并且x32(t)趋近0;
规则2:
If:x31(t)趋近±2, 或者x32(t)趋近-1;

在此基础上, 假设参数不确定, 考虑一下两类参数不确定性情况:
假设系统初始状态为:
状态变量的仿真曲线如图1.
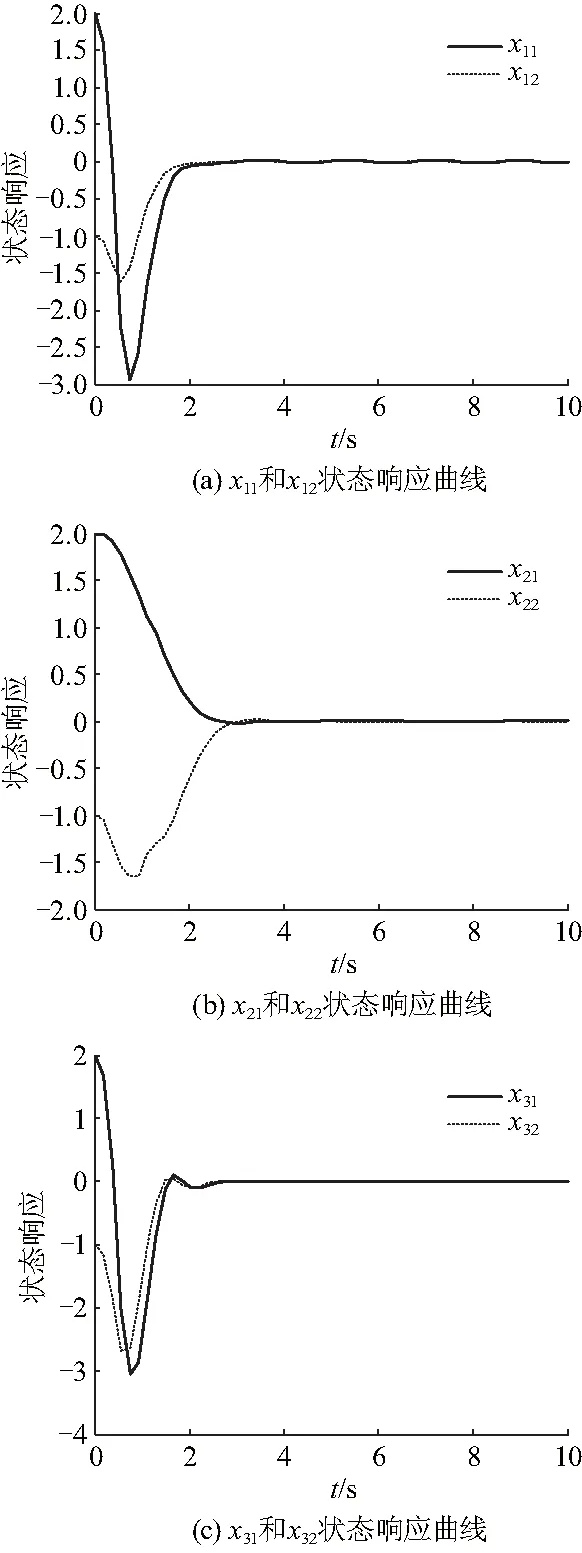
图1 系统矩阵元素随机变化时状态响应曲线Fig.1 State responses of system matrixes changed with random
(2) 假设系统矩阵不确定量按下面的规律变化:
子系统1:

子系统2:

子系统3:

采用上节提出的控制器设计步骤, 得到状态反馈增益为:
假设系统初始状态为:
状态变量的仿真曲线如图2.
图2 系统矩阵元素按规律变化时状态响应曲线Fig.2 State responses of system matrixes changed with regular
从图1和图2的仿真曲线可以看出,在系统矩阵参数不确定时,模糊大系统的状态向量在有限时间内均趋于零,控制效果很好,这说明了本文提出算法的有效性.
5 结论
(1) 文中考虑了一类参数不确定模糊关联大系统的稳定性及控制器设计问题, 整个系统由多个相关关联的T-S模糊系统构成.
(2) 基于Lyapunov渐近稳定性理论及大系统控制理论, 研究保证该模糊关联大系统闭环鲁棒渐进稳定的线性状态反馈控制器的设计方法, 并提出控制器设计步骤. 算例仿真验证所提出的控制器设计方法的有效性.
(3) 文中提出的参数不确定关联模糊大系统的稳定性定理及线性状态反馈控制器设计方法, 可有效解决大系统建模及控制中的参数不确定性问题.相比目前常用的基于LMI的控制器设计方法及PDC控制方法, 文中所设计方法更简单有效, 对大系统的研究具有一定意义.
