旋翼无人机工业区航测精度与控制点数量关系研究
2018-08-03赵艳玲田帅帅张建勇闫皓月
赵艳玲,田帅帅,张建勇,王 鑫,闫皓月,张 硕
(中国矿业大学(北京)地球科学与测绘工程学院,北京 100083)
工业区一般指各类产业、企业聚集区,地表各种建构筑物较为密集。为了城市和地区的发展获取工业区高空间、时间分辨率的数字地表模型(DSM)和正射影像图(DOM)数据非常重要。传统的获取DSM和DOM的方法是基础测量或卫星遥感。全站仪或RTK获取地形数据虽然精度高,但是耗时费力;卫星遥感效率高,但是精度目前停滞在米级。近年来,无人机技术以其低成本、高精度、高效率等特点,弥补了传统测量效率低、卫星遥感精度差的缺点,成为航天、航空遥感和地面实测的有力补充手段[1],逐渐应用到各行各业[2-6]。
在测绘方面,利用无人机获取地形数据的技术已经较为成熟。周高伟等以双介质摄影测量原理为基础,利用海岛无人机影像开展了航空双介质摄影测量试验与分析[7];吕立蕾等用固定翼无人机对研究区进行航拍,提出了无人机航拍成果适用于1∶1000比例尺地形图精度,但不满足1∶500精度[8]。针对如何获取更高质量的数据成果,也有许多学者进行了研究,M R James等研究了控制点质量和相机模式对生成DEM精度的影响[9];Marina Torres等通过对研究区进行不同飞行路径的设计与试验,得出了利用无人机进行三维地面建模的最佳飞行路径[10];买小争等采用“隔航带、隔基线”的方法布设像控点,提出了满足1∶1000数字正射影像图制作的像控点布设方案[11];陈良浩等针对大面积水域的特殊情况提出了“密周边,隔基线”的控制点布设方案,最终成果满足1∶500大比例尺地形图测绘要求[12];朱进等研究了6种不同的控制点布设方案,最终提出边角均匀、内部加控的方案能达到最高精度[13]。在这些研究中,许多专家和学者针对控制点布设方案、控制点质量、飞行路径等方面针对不同应用情况提出讨论。但是由于工业区地物覆盖较为复杂,控制点布设不方便,很多飞行实施方案并不适用。目前,针对这一特殊情况的研究尚不充分。由数学基本原理可知,3个点可以确定1个平面,因此赋予无人机摄影测量坐标系至少需要3个地面控制点,但是否控制点越多精度就越高,这一点尚无定论。况且,对于无人机摄影测量来讲,野外工作量大小主要取决于控制点的个数,成图精度是否随控制点个数增加不断上升,或是布设多少个控制点能达到最佳效果就显得意义重大。本文以旋翼无人机为例,排除其他可能对成果精度产生影响的因素,在山东某矿厂区进行试验,针对控制点个数的布设提出研究方法并得出结论,对以后相关方面无人机获取地形地貌数据的实施具有参考意义。
1 研究区与航拍设备
1.1 研究区简介
研究区位于山东省某煤矿厂区(如图1所示),东经116°23′45″—116°31′07″,北纬36°26′07″—36°30′57″。厂区长宽为450 m×340 m,面积为15.3 hm2。厂区内建筑物较为复杂,生产设备全天运行,部分生产区和生活区由于保密原因不得随意进出,给控制点的布设带来了不便。
图1 研究区
1.2 无人机及载荷
目前,世界上已有超过300种无人机,按结构可分为固定翼、旋翼、无人直升机和垂直起降UAV[14]。其中,旋翼无人机以其重量轻、体积小、机动性强等优点应用十分广泛。本文以大疆经纬M100四旋翼无人机(如图2所示)为飞行平台,以Zenmuse X3数码相机为任务载荷进行航拍工作,平台与载荷的主要参数见表1。

表1 无人机平台和任务载荷的主要参数

图2 M100无人机平台
2 数据获取及处理
2.1 航拍影像获取
在对研究区进行实地踏勘后,选取工业广场中视野较为开阔、周围无高大遮挡物的运动场作为起飞平台。依据《低空数字航空摄影测量外业规范》的要求及航拍任务的实际需要,此次航拍重叠度设置为航向80%、旁向60%,航高设置为100 m,共获取影像245景,地面分辨率为4.7 cm。航拍当日天气晴朗,有微风,光照充足。
2.2 地面控制点采集
地面控制点按主要用途分为像控点和检查点两种。像控点的布设与量测的主要目的是获取控制点的物方大地坐标,以及使影像与实测地区产生联系,以便于投影和影像校正。检查点的布设与测量工作的主要目的是对最终生成的精度进行评价,直观地反映出最终产品制作的精度。考虑研究区面积小、精度要求较高,本文选用南方S82型RTK接入矿区当地CORS网,进行控制点的采集。为保证精度,控制点设置观测2个测回,平滑次数10次,以水平方向20 mm、垂直方向20 mm为收敛阈值,共采集53个控制点(如图3所示)。

图3 控制点分布
2.3 影像处理
运动与结构重建(structure from motion,SFM)技术结合了计算机视觉和摄影测量学,可以用从不同高度、不同方向获取的影像恢复出相应的三维信息,以其更高的灵活性和成果精度被广泛使用[15]。结合这一技术的许多摄影测量软件,如Microsoft Photosynth、Agisoft PhotoScan与Pix4Dmapper都已经多次运用于科学研究[16]。
本文选用Pix4Dmapper进行无人机影像的拼接和成果输出。Pix4Dmapper为瑞士Pix4D公司自主研发的一款全自动快速的无人机遥感数据处理软件,该款无人机数据与航空影像处理软件具备全自动、专业、快捷、精度高等特点。该软件无需相关专业知识和人工干预,即可以将数千张无人机遥感影像进行快速处理,镶嵌、拼接、空三加密等,生成测区的正射影像图(DOM)、数字表面模型(DSM)、三维立体模型等专业的、精确的数字产品。工作流程简单易懂,能够自动获取相机参数并对非量测相机进行检校,更无需IMU数据,自动生成点云数据、DSM、DOM等成果。
从控制点角度出发研究摄影测量成果精度,在采集条件相同的前提下主要通过两个方面来进行分析,即个数和布设方案。由摄影测量学和数学原理,确定一个平面并赋予坐标系至少需要3个控制点。本文采用逐级增加的方式对控制点个数对精度的影响展开研究。个数以3个起始逐级递增2个共设置9个等级。为了排除控制点布设方案造成的影响,每个控制点个数等级都设置4种布设方案以得到最可靠结果。最终得到36组控制点布设方案,分布位置如图4所示。
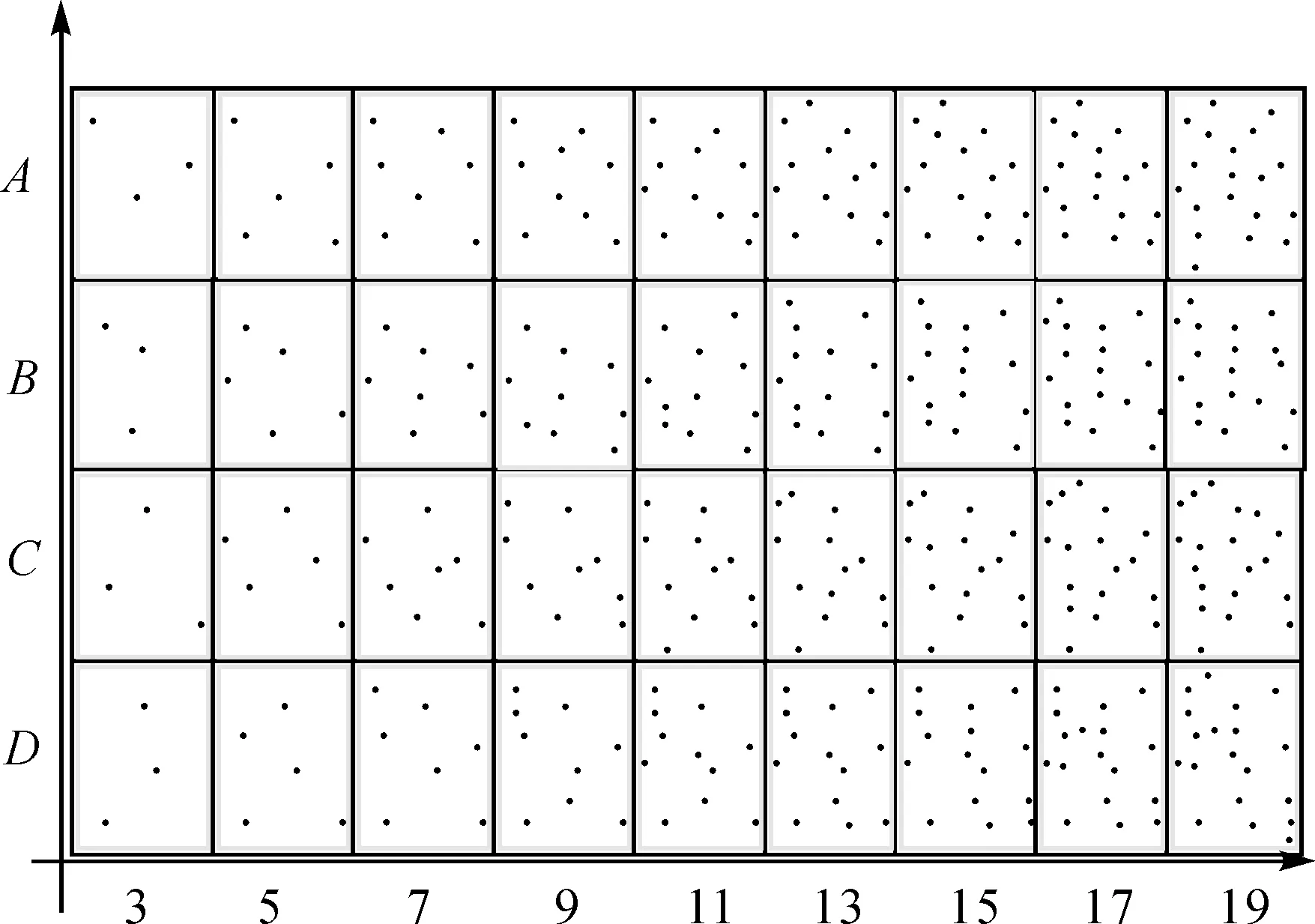
图4 控制点方案(横向为控制点个数,纵向为相同控制点个数不同布设方案)
3 精度验证及讨论
Birute Ruzgiene[16]研究表明,不加控制点时成图误差极大,高程误差可达米级,加控制点之后误差迅速稳定在分米甚至厘米级。为评价各个等级控制点数量对精度产生的影像,本文选取17个均匀分布全图的控制点进行精度验证。
以ArcGIS为平台,将17个点分别在生成的36幅正射影像图刺出,提取横纵坐标,然后在相应的数字地表模型(DSM)上提取高程,以实测值作为真值、提取的三维坐标作为测量值分别计算水平和竖直方向的误差。对36个布点方案分别计算其x、y和z这3个方向的均方根误差(RMSE),再计算9个控制点数量等级的x、y和z这3个方向的均方根误差(RMSE),其计算公式为
(1)
(2)
(3)
式中,Xi、Yi和Zi分别表示正射影像图中提取的测量值;X、Y和Z分别表示实测值;n表示参与运算的点数。
取每个控制点个数等级所有检验点总均方根误差和4个布点方案中均方根误差的最大值和最小值,如图5所示。

图5 均方根误差分布
以股价图的形式表示均方根误差的大小,图5中竖线上下两端为同一控制点个数等级4个布点方案中均方根误差的最大、最小值,中间黑色实心点表示该控制点等级数目所有检查点误差的均方根误差。
从总体来看,3幅图均可分为两个阶段:①误差减小稳定性增加阶段。水平方向x和y的误差在控制点从3个增加到15个的过程中,中间黑色实心点逐渐降低,竖线逐渐缩短,这说明随着控制点个数的增加,成果的精度在逐渐提高,并且由不同控制点布设方案而引起的误差浮动也在缩小,即精度逐渐趋于稳定;竖直方向z的误差在控制点从3个增加到11个的过程中也呈现以上规律。②误差基本不变阶段。水平方向x和y当控制点个数达到15个以后,误差便不再减小而是在一定范围内微弱的浮动,竖直方向z在11个控制点以上也呈现此规律。
具体来看,水平x和y两个方向控制点个数在从3个到15个控制点增加的过程中,总的均方根误差分别从7.31 cm和9.02 cm减小到3.57 cm和5.37 cm,控制点方案不同产生的最大均方根误差分别从11.38 cm和11.36 cm减小到4.24 cm和5.61 cm。这说明在控制点不断增加的过程中,成图精度不断升高,并且由控制点方案引起的成图精度的差异不断减小,即精度更加稳定;而当控制点个数达到19个时,x和y总的均方根误差分别为3.60 cm和5.20 cm,最大均方根误差分别为4.05 cm和5.66 cm,与15个控制点时的误差几乎没有差异,即增长到达极限并趋于稳定。竖直方向上,控制点个数从3个增加到11个的过程中,总的均方根误差和最大均方根误差分别从59.51 cm和44.29 cm减小到11.89 cm和9.91 cm,与水平方向相比精度提升更为明显,当控制点个数增加到19个时,这两个误差分别为9.01 cm和7.08 cm,精度有略微提升但并不明显。与水平误差相比,竖直方向的误差除上述的两个相同规律外,还呈现出稳定趋势较早和稳定值较高的特点,竖直误差在控制点达到11个时精度就开始趋于极限并稳定,水平方向则需达到15个,水平两个方向的稳定值分别为4 cm和5 cm,而竖直方向的稳定值则为7 cm左右。
综上所述,当控制点个数增加时成图精度先逐渐增高,水平和竖直精度分别在15个和11个控制点时趋于稳定值。Birute Ruzgiene[16]在研究中总结称航空摄影测量成果水平方向误差最低可以达到1倍的地面分辨率,竖直方向最低可达到1.6倍的地面分辨率也进一步印证了这一结论。
4 结论与不足
无人机摄影测量用于数据采集的方法已经逐渐应用于各行各业。工业区等控制点布设不方便的特殊区域控制点个数对成图精度的影响至今尚无具体定论,本文设计了9个不同等级的控制点个数方案,每个等级又设置了4种布点方案,最终得到结论如下:
(1) 随着控制点个数增加,水平和竖直两个方向的精度都在增加且成图精度更加稳定。
(2) 当控制点增加到一定个数时,精度趋于稳定不再增加,成图精度趋于最稳定状态。
(3) 竖直方向相对于水平方向的误差对控制点的反响更灵敏,精度更早趋于稳定,但稳定后误差相对较大。
(4) 以本文100 m航高、4.7 cm分辨率为例,布设15个控制点即可得到最佳成果;如果着重竖直方面精度11个控制点即可得到最佳成果。
但本文也有一些不足之处: 厂区内地势相对较为平缓,高差落差不大,是否会影响对竖直方向精度的分析结果存疑。
