基于改进MOPSO的MMC-HVDC控制器PI参数分层优化
2018-08-02谢国超刘崇茹凌博文徐东旭
谢国超,刘崇茹,凌博文 ,徐东旭,朱 毅
(1.新能源电力系统国家重点实验室(华北电力大学),北京 102206;2.国网山东省电力公司经济技术研究院,山东济南 250021)
0 引 言
模块化多电平换流器(modular multilevel converter, MMC)自被提出以来便得到了广泛的关注。MMC具有独立控制有功功率和无功功率、向无源网络或者弱交流系统供电等传统电压源换流器的特点,且波形质量高、换流器损耗低,现已被广泛应用于直流电网的构建并在新能源并网和大电网互联等领域极具发展潜力。迄今为止,模块化多电平换流器型高压直流输电工程(modular multilevel converter-high voltage direct current, MMC-HVDC)在国内外均取得了成功的应用[1]。
多模块的拓扑结构和多环节的控制策略使其在仿真研究和工程实践中需要考虑复杂的协调控制,因而对其控制系统的性能要求非常高。比例-积分(proportional-integral, PI)控制以其调节快速、结构简单、参数定义易于理解、易于实现等优点而被广泛应用于MMC的控制系统中,但工程中常采用试凑法获得参数,这不仅对工程师提出了很高的要求,而且十分耗费精力和时间。近年来,随着智能优化算法的普及和深入,智能优化算法已经越来越多地应用于PI控制器参数优化。
多目标粒子群算法(multi objective particle swarm optimization,MOPSO)以其良好的收敛性能、简单的计算模式、较强的全局搜索能力和较少的参数设置的特点而被广泛应用于多目标优化问题的求解,也有学者使用MOPSO算法优化PI控制器参数。文献[2]利用多目标粒子群算法优化统一潮流控制器的控制系统。文献[3]采用MOPSO算法优化了以系统成本和污染排放最小为目标函数的“源-网-荷-储”优化调度模型。文献[4]对MOPSO算法进行了改进并对含风电场的电力系统进行了优化调度。文献[5]利用改进的MOPSO算法优化能源管理系统中的设计参数。文献[6]采用MOPSO算法优化多个目标函数,进而得到在柔性交流系统中安装电力电子装置的最优位置。文献[7]利用改进的MOPSO算法提出一种含有分布式电源的配电网重构方法。文献[8]采用MOPSO算法求解考虑环境约束和机组运行效率的电力系统经济平稳调度模型。文献[9]建立了基于MOPSO算法的连锁跳闸预防控制方法。
MMC模型中含有众多的电力电子开关和非线性电容等元件,其控制系统模型具有多目标、非线性、高阶性、离散型等特点,本文将MOPSO算法应用于MMC-HVDC控制器PI参数的优化并对算法进行了改进,通过引入遗传算法中的变异机制同时增加一种基于隶属度函数的领导粒子选取方法,降低了算法出现局部收敛的概率,增强了算法全局寻优能力,从而改善了算法性能。
1 MMC-HVDC控制策略
MMC-HVDC常规的控制系统采用直接电流控制中的矢量控制策略[10-12],通过坐标变换将abc坐标系下的三相交流量转换为dq坐标系下的同步旋转的直流量建立MMC的数学模型。矢量控制策略采用双闭环控制方式,通过dq轴解耦,形成外环控制器和内环控制器[13],其控制框图如图1所示。其中,外环控制器根据系统级控制设定的公共连接点处的有功功率和无功功率、直流侧的直流电压或交流侧的交流电压等参考值,计算用于内环控制器的dq轴电流参考值,而内环控制器则通过调节换流器输出的初始电压调制波使dq轴电流快速跟踪其参考值。
MMC-HVDC的基本控制方式由外环控制器决定,目前广泛使用的控制方式组合为有功功率和无功功率(PQ)控制和直流电压和无功功率(UDCQ)控制。设外环控制器d轴的传递函数为KPd+KId/s,KPd和KId分别为外环d轴控制器的比例系数和积分系数,外环控制器q轴的传递函数为KPq+KIq/s,KPq和KIq分别为外环q轴控制器的比例系数和积分系数。为了使控制环节简洁清晰,可以假设MMC交流电压的dq轴电压(ud和uq)近似等于内环控制器输出的dq轴电压分量(udref和uqref)[14],即ud≈udref,uq≈uqref,则内环dq轴的控制器可以使用同一套PI参数,因此,对于内环控制器,传递函数为KP+KI/s,KP和KI分别为内环d轴和q轴控制器的比例系数和积分系数。因此,MMC控制系统中,有6个待优化的PI参数,分别为KPd、KId、KPq、KIq和KP、KI。

图1 矢量控制策略框图Fig.1 Vector control strategy
2 MOPSO算法改进
2.1 MOPSO简介
2004年,Coello提出了多目标粒子群智能算法,成功将只能用于单目标优化问题的粒子群算法应用于多目标优化问题[15],其基本思想是通过迭代更新粒子的速度和位置信息来搜索最优值,算法采用外部存储器和自适应网格机制保存非劣解并保持解的多样性。算法主要流程如下:
Step1:设定算法相关参数的值,初始化粒子种群的结构体信息,计算初始适应值;计算支配属性,把非支配解加入到外部存储器并初始化网格;令迭代次数j=1。
Step2:在外部存储器中选择一个领导粒子作为当前全体粒子的最优值,依式(1)对粒子群速度和位置进行迭代更新;判断位置是否有超出上下限,如果超出则取值为上下限,并且相应的将速度改变方向。
(1)
式中:vj和pj是第j次迭代中粒子的飞行速度和位置;ω表示惯性权重系数;pbest,j-1是第j-1次迭代中全部粒子的最优位置;gbest是全局最优位置;c1为代表粒子自我认知能力的加速因子;c2为代表粒子社会认知能力的加速因子;r是随机数,在[0,1]之间服从均匀分布。
Step3:更新每个粒子所经过位置的最优值,计算支配属性,把非支配解加入到外部存储器,如果非支配解数量超出网格容量,则利用与选取领导粒子相似的方法删除粒子密集区域的某些粒子。
Step4:令j=j+1,重复step2和step3,直至到达最大的迭代次数。
2.2 MOPSO的改进
2.2.1变异机制
迭代过程中如果多次迭代选取的领导粒子的结果保持不变,此时可能使种群陷入局部最优值,而达不到真实的Pareto前沿。本文引入遗传算法中的变异机制,使其更大限度地能够遍历寻优空间,并使外部存储器中的非支配解尽可能地靠近真实的Pareto前沿。
迭代过程中,将获得的非支配解加入到外部存储器后,对外部存储器中的所有粒子的位置进行变异操作,对于第k个非支配解的位置信息xk,采用如下变异方法:
首先,根据式(2)计算变异率p,
p=(1-(j-1)/(Nloop-1))(1/m)
(2)
式中:Nloop为最大迭代次数;m为变异系数;j为当前迭代次数。
然后,计算变异区间,
[min(Vdown,xk-Δx),max(Vup,xk+Δx)]
(3)
式中:Vup和Vdown为参数寻优空间的最大和最小值,min和max为求取最小值和最大值的函数,Δx由式(4)计算得到:
Δx=p×(Vup-Vdown)
(4)
最后,根据式(5)计算变异结果Xk,并更新外部存储器。
Xk=unifrnd(min(Vdown,xk-Δx),max(Vup,xk+Δx))
(5)
式中:unifrnd为创建随机的连续均匀分布数组函数。
使用变异后的结果计算适应值,如果所得适应值支配变异前的适应值,则以此变异结果代替存储器中原有的非支配解,从而完成变异操作。
2.2.2基于隶属度函数的领导粒子选取方法
基本MOPSO算法选取领导粒子时,首先计算每个网格的拥挤程度,用轮盘赌的方法选取一个网格,然后从选出的网格中随机选取一个粒子作为领导粒子。上述方法在迭代初期效果明显,计算得到的适应值随迭代次数的增加而显著降低,但是在迭代后期对适应值的改善效果不明显,而且需要迭代多次才能到达全局最优值。
针对此问题,本文应用模糊集理论提出一种基于隶属度函数的领导粒子选取方法,决策者通过计算外部存储器中每个非支配解的适应值的隶属度,作为领导粒子选取的评价指标。
本文以时间乘绝对误差积分准则(integrated time and absolute error, ITAE)为参考指标[16],建立控制目标的适应度评价函数,如式(6)所示。

(6)
式中:yref为相应的控制目标的参考值;y为相应的控制目标的实际值;积分上限T为动态过程时间。
本文选取由MMC的控制目标和桥臂环流的ITAE值组成的三维向量作为多目标粒子群算法的适应值,当维数i=1,2,3时,fi分别表示有功类控制目标的ITAE值、无功类控制目标的ITAE值和桥臂环流的ITAE值。
为了简化分析同时具有代表性,本文采用一个简单的线性函数作为适应值的隶属度函数。
首先,找出每一维适应值的最大和最小值,记为fimax和fimin;
然后,利用式(7)对三维ITAE指标构成的适应值进行模糊化处理,
(7)
式中:fi,k代表第k个非支配解第i维的适应值;li,k为对应的模糊化处理后的适应值。
通过模糊化处理,每一维适应值转化为0到1之间的数值,数值越大代表该维适应值更优,数值越小则更差。
最后,计算每一个粒子的隶属度函数值Lk,为简化分析,认为三维适应值之间同等重要,即可以通过式(8)计算隶属度函数值,并用轮盘赌的方法选取其中一个的粒子作为领导粒子。
(8)
式中:n为外部存储器中存储的非支配解的数量。
由此,多目标优化问题被转换成了单目标问题,并且避免了可能由于各维度数值差异过大而带来的某一维度指标起主导作用的影响。在算法结束后,可选择式(8)中具有最大隶属度函数值的非支配解作为整个优化过程的最优解。
3 MMC-HVDC控制器PI参数分层优化
3.1 内外环控制参数分层优化
MMC控制系统中,首先由外环控制器计算出dq轴电流参考值,然后将其输入内环控制器得到换流器输出的初始电压调制波。针对控制系统的设计结构,本文对待优化的6个参数进行分层交替优化。在采用本文改进的MOPSO的每次迭代过程中,首先优化内环的控制参数,然后优化外环控制参数。具体操作是:算法每次迭代过程中,粒子速度和位置更新两次,计算两次适应值,第一次更新后,将领导粒子的外环参数赋给种群中所有粒子,即保持外环参数不变,试图优化出性能更佳的内环参数,第二次更新后,将领导粒子的内环参数赋给所有粒子,即固定内环参数,优化出性能更佳的外环参数。
3.2 控制参数优化流程
本文在MATLAB上运行改进MOPSO算法,在PSCAD/EMTDC上运行MMC仿真模型用以计算适应值,综合了MATLAB强大的数据处理能力和PSCAD/EMTDC仿真精确的优势。为了实现PSCAD/EMTDC将适应值传输给MATLAB进行寻优,同时MATLAB将控制参数传输给PSCAD/EMTDC计算适应值,在PSCAD/EMTDC中利用Fortran语言建立了MATLAB与PSCAD/EMTDC联合调用的自定义功能模块。同时针对PSCAD/EMTDC仿真运行时间长的问题,在实验室使用局域网连接多台计算机,在MATLAB中编写任务管理分配函数,结合此自定义功能模块实现多个PSCAD/EMTDC仿真程序与MATLAB同时交互数据,从而减少适应值的计算时间,提高寻优效率,框图如图2所示。
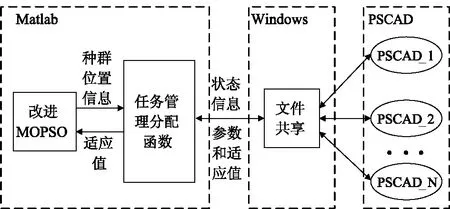
图2 联合调用与数据交互框图Fig.2 Combined invocation and data exchange
为了综合基于拥挤度方法选取领导粒子和基于隶属度方法选取领导粒子的优势,本文设置在前半迭代周期内采用基于拥挤度方法选取领导粒子,后半迭代周期采用基于隶属度方法选取领导粒子。
图3为本文提出的基于改进多目标粒子群算法的MMC-HVDC控制参数优化过程。
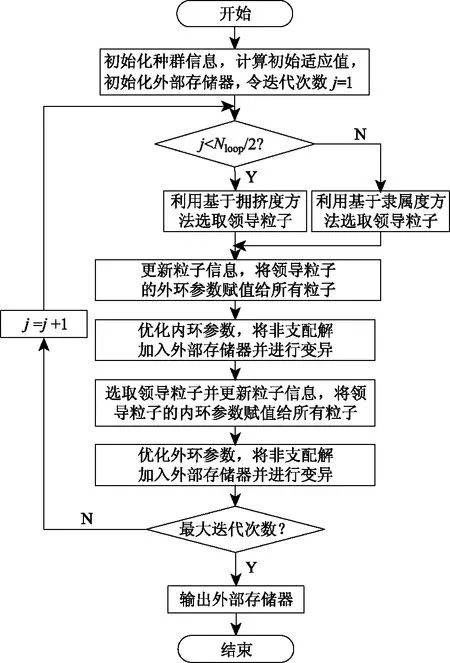
图3 控制参数优化流程Fig.3 Process of control parameter optimization
4 算法性能分析与仿真验证
4.1 单端101电平算例系统
本文在PSCAD/EMTDC下搭建单端101电平MMC-HVDC系统用于参数优化过程的适应值计算和优化结果的仿真验证,其拓扑结构如图4所示。

图4 MMC-HVDC系统仿真模型Fig.4 Simulation model of MMC-HVDC
仿真模型运行工况为:采用定有功功率和无功功率控制,其设定值分别为100MW和30Mvar。联结变压器、桥臂电抗、每个桥臂半桥子模块个数、子模块电容等的参数如表1所示。

表1 MMC-HVDC模型参数设置Tab.1 Parameters for MMC-HVDC
采用最近电平逼近调制策略,并且对子模块电容电压和桥臂环流加以控制。本文桥臂环流抑制策略使用文献[17]提出的谐振控制器,其对二次谐波和四次谐波抑制的传递函数分别为sK2/(s2+(2×ω0))和sK4/(s2+(2×ω0)),K2和K4的取值分别为400和200。桥臂模型选用半桥详细等效模型,联结变压器网侧绕组采用星型接法,阀侧绕组采用三角型接法。仿真运行时间和适应值函数的动态过程时间均为2 s。
试验中设置6个PSCAD/EMTDC仿真程序分布于3台主频为3GHz、内存为8G的计算机上,在其中1台计算机上运行MATLAB控制参数寻优算法,完成MATLAB与多个PSCAD/EMTDC之间的数据交互和联合调用。改进MOPSO算法的参数设置为种群规模、外部存储器规模和迭代次数均为100,更新公式中的参数为c1=c2=1.4,ω=1.0。
4.2 评价指标对比分析
为验证本文提出的改进算法的性能,选用基本MOPSO算法和带精英策略的非支配排序多目标遗传算法(fast and elitist non-dominated sorting in genetic algorithm, NSGA-II)进行对比,设置3种算法均获得100个Pareto解集,迭次100次,同时,设置NSGA-II算法的交叉率为0.8,变异率为0.2。对比结果如表2所示。

表2 优化前后评价指标对比Tab.2 Comparison of objectives between before and after optimization
适应值范围由外部存储器中粒子每一维适应值的最大值和最小值确定,优化程度由适应值范围的上界计算得到。通过对比结果可以看出,3种优化方法均可以对控制参数进行优化,使控制性能提高,而且本文提出的基于改进多目标粒子群算法的MMC-HVDC控制器PI参数分层优化方法的优化程度高于基本MOPSO算法和NSGA-II算法。
表3列出了优化前控制参数的整定值与采用不同优化方法所得的控制参数的参数值,整定值基于文献[18]所述方法计算得到,表中所列的优化结果是在外部存储器中采用如前所述的隶属度函数方法选取的典型值。
本文将3种优化方法的寻优过程进行对比,其适应值的收敛曲线如图5所示。可以看出,3种优化方法均产生了良好的优化效果,改进优化方法的优化性能较佳。

表3 优化前后控制参数对比Tab.3 Comparison of control parameters between before and after optimization
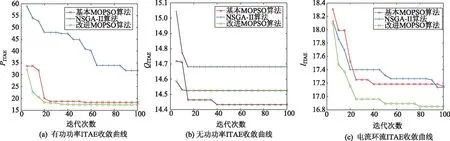
图5 适应值收敛曲线Fig.5 Fitness convergence curves
4.3 仿真结果对比

图6 交流电压下降时有功功率对比Fig.6 Active power comparison with the AC voltage drop
将仿真算例中待优化的参数修改为表3中优化出的参数,设置不同故障并观察暂态响应,以此验证本文算法的有效性。
设置仿真模型在2s时交流侧母线电压降低为0.85p.u,故障持续0.1s,分别对有功功率、无功功率和A相桥臂环流的波形进行对比,如图6~图8所示。通过对比可以看出,本文提出的改进优化方法可以使得有功功率和无功功率的调整时间减少,同时使超调量更低,在稳态和暂态过程中均能将环流抑制在非常小的范围内。

图7 交流电压下降时无功功率对比Fig.7 Reactive power comparison with the AC voltage drop

图8 交流电压下降时A相环流对比Fig.8 Circulating current comparison of phase A with the AC voltage drop
设置仿真模型在2s时有功功率整定值降低为80MW,分别对有功功率、无功功率和A相桥臂环流的波形进行对比,如图9~图11所示。通过对比可以看出,在有功功率参考值改变的暂态响应中,本文提出的改进优化方法可以使得有功功率的调整时间减少,同时使超调量更低,在稳态和暂态过程中均能将无功功率的波动和环流抑制在非常小的范围内。
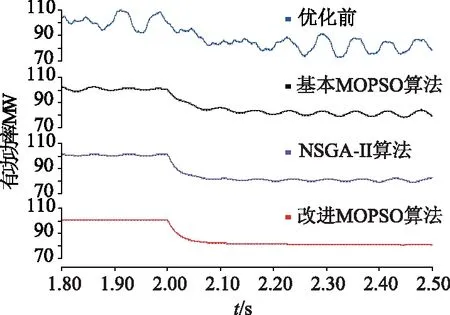
图9 有功功率下降时有功功率对比Fig.9 Active power comparison with the active power drop

图11 有功功率下降时A相环流对比Fig.11 Circulating current comparison of phase A with the active power drop
5 结束语
本文提出了一种采用改进MOPSO算法对MMC-HVDC控制器PI参数进行分层优化的方法,实现了MATLAB与PSCAD/EMTDC之间的联合调用和数据交互。在优化算法方面,该改进方法对外部存储器中的非支配解进行变异操作并更新外部存储器,进而添加一种基于隶属度函数的领导粒子选取方法,与基于拥挤度的领导粒子选取方法分阶段使用,提高了算法全局寻优的能力,改善了算法的收敛性能;在优化方式方面,对内外环控制参数进行分层优化,从而适应控制系统的设计结构。仿真结果表明本文提出的方法可以同时改善算法性能和MMC的动态响应,从而验证了本文方法的有效性和实用性。