危险气体泄漏源搜寻多机器人系统的设计与实现*
2018-07-20陈寅生赵文杰哈尔滨理工大学测控技术与通信工程学院哈尔滨5000哈尔滨工业大学电气工程与自动化学院哈尔滨5000
陈寅生,赵文杰,宋 凯,王 祁(.哈尔滨理工大学测控技术与通信工程学院,哈尔滨 5000;.哈尔滨工业大学电气工程与自动化学院,哈尔滨 5000)
气源搜寻结合了机器人技术和传感器技术,是当前仿生嗅觉研究领域中的一个活跃的研究方向。嗅觉机器人在搜寻易燃易爆气体、危险化学品泄漏、大气污染源等方面具有潜在的应用价值[1-3]。
为了对危险气体泄露源进行准确定位,国内外相关学者进行了大量的研究工作。Russell和Deveza利用樟脑铺设了一条路线,设计了安装了两个气体传感器的嗅觉机器人沿着这条路线行走[4]。此外,Russell还提出了一种通过跟踪气味烟羽进行气源定位的气源搜寻算法[5]。Kuwana和Shimoyama将两个昆虫的触角作为传感器安装在机器人上获取空气中的信息素,提出了一种仿生蚕蛾信息素烟羽跟踪算法。Kazadi等采用相似的算法控制装有聚合体传感器的机器人跟踪水蒸气形成的烟羽[6]。Grasso等研制了仿生机器虾用来研究龙虾识别和跟踪气味的方式[7],该机器人能够在水中移动,利用左右两边装配的气敏传感器进行导航。Morse等人模仿蚯蚓的化学向性,并利用视觉传感器感测光强的梯度来对机器人进行导航,实现了化学趋向性的算法[8]。Tom Ducket的团队提出了一种新的理念,利用电子鼻测量气体烟羽中与气源不同距离和不同角度的位置,利用这些数据对电子鼻进行训练,使训练好的电子鼻可以预测气源的距离、运动方向和气源方向角等信息,从而迅速寻找到气源[9]。Ishida H等人采用多个气体传感器构成一个平面阵列,通过阵列感知的数据绘制烟羽或气体浓度的分布图,根据分布图中不同位置的浓度差异,判断气源的方向,进而实现气源定位[10]。浙江大学王平课题组通过实现大鼠嗅觉神经元信号的分析解码,实现气味检测与识别,取得了有效的成果[11]。通过以上的分析可知,当前利用气体传感器检测烟羽的浓度梯度逐步实现气源搜寻是目前的经济、有效的实施方案[12]。但是,此类方法仍然存在设计复杂且搜寻成功率较低等问题。
鉴于此,本文设计一种安装有多个气体传感器和风速传感器的嗅觉机器人来检测浓度梯度和风向,嗅觉机器人将融合气体浓度和风速信息决定移动方向,制定搜寻策略,最终实现对单一有害气体泄漏源的定位。多个嗅觉机器人组成多机器人系统,利用无线传感器网络进行协作,提高了气源定位效率和准确性。当一个嗅觉机器人找到泄漏源时将发出警报声,其他机器人利用装配的麦克风阵列结合声源定位算法进行声源定位,实现多机器人系统的协同工作,对泄露源进行间接定位。
为了验证提出的多机器人系统气源定位的有效性,本文设计了基于单一易燃气体泄漏源搜寻实验,对提出的气源定位算法的有效性和准确性进行验证。
1 系统设计
本文设计的基于无线传感器网络的多机器人系统结构框图如图1所示。每个无线传感器网络节点是以DSP TMS320F28335为控制核心的嗅觉机器人。嗅觉机器人上安装有气体传感器、风速传感器、温度传感器及麦克风阵列对环境信息进行监测,经过信号调理电路由DSP进行采集和处理,驱动电机并实现嗅觉机器人的导航。嗅觉机器人上装配有无线传输模块与上位机(PC机)构成的Sink节点进行信息交互,组成气源搜寻多机器人系统。
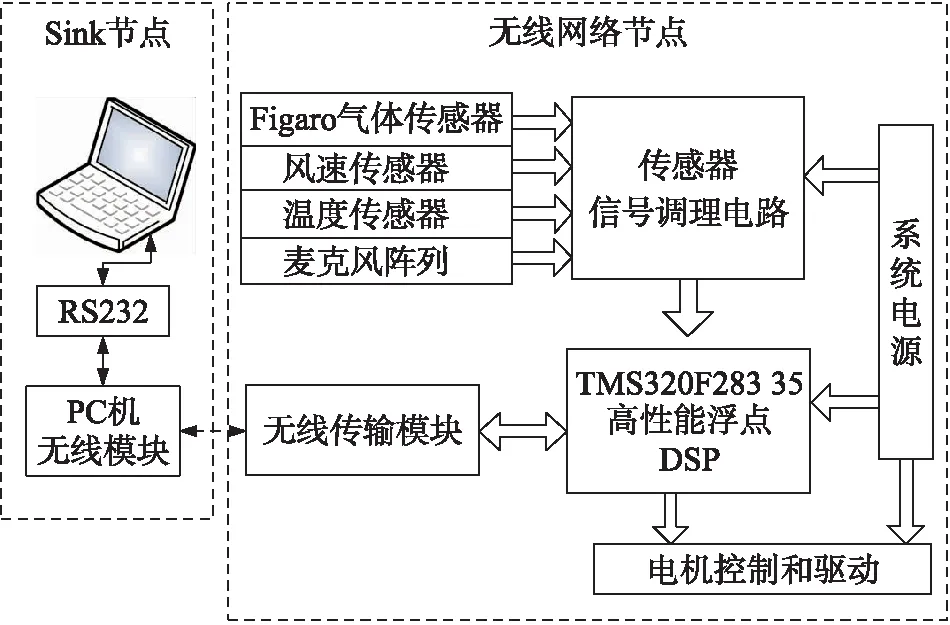
图1 系统结构框图
1.1 硬件设计
嗅觉机器人硬件设计框图如图2所示。由信号处理与控制单元(TMS320F28335)、无线收发模块、磁阻传感器、外部SD卡、实时时钟及移动小车等组成机器人系统的基础功能部分。在虚线框1内的气体传感器和风速传感器实现嗅觉机器人对气体浓度、风速信息的采集;虚线框2内的触点传感器用于在定位气源后触发报警器;在虚线框3内的麦克风阵列实现机器人对声音信号采集功能。

图2 嗅觉机器人硬件设计框图
1.1.1 处理与控制单元
本设计考虑到对多种传感器数据的实时采集和气源、声源搜寻算法的实现,选用TI公司的TMS320F28335浮点DSP控制器。该DSP具有精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等特点。
1.1.2 气体传感器
本设计采用日本Figaro公司TGS2620型金属氧化物半导体气体传感器,具有对酒精和有机溶剂蒸汽灵敏度较高的特点,可以应用于酒精、有机溶剂蒸汽等可燃性气体检测。当检测到可燃气体存在时,由于气体浓度越高,传感器的电导率就越高。因此,可采用简单测量电路对气体浓度的变化进行测量。传感器部分采用3个气体传感器(R1,R2,R3)安装在彼此间隔120°的等长臂上,组成气体传感器阵列实现对气体浓度的采集,获取浓度差。气体传感器信号调理电路如图3所示。图4所示为嗅觉机器人上安装的气体传感器的分布图。
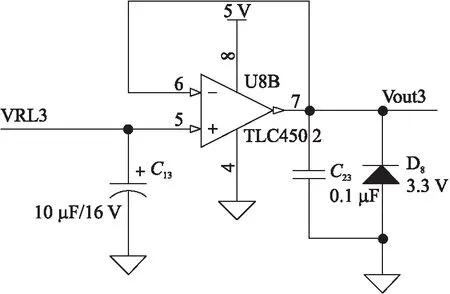
图3 气体传感器信号调理电路
1.1.3 风速传感器
风速测量电路中采用铂电阻PT60作为风速测量传感器,使用45 mA~50 mA的恒流源为其提供工作电流,PT1000用于桥路的温度补偿,减小测量误差。
风速传感器基于热量转移原理,加热铂电阻到约150 ℃,当有风吹过铂电阻会带走热量,铂电阻随温度的变化,阻值也随之变化,实现了对风速的测量。嗅觉机器人装配2个风速传感器对风速进行采集(如图4中F1和F2所示),中间用挡板隔开,进而通过风速的比较以确定风向。
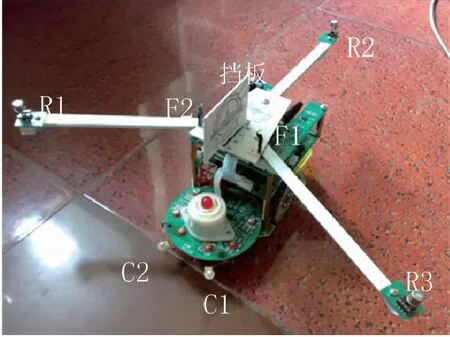
图4 气体传感器和风速传感器分布图
1.1.4 磁阻传感器
本设计采用霍尼韦尔磁阻传感器HMC1022,它是双轴传感器,可测量横向、纵向两个方向的磁感应强度,通过比较两路磁感应强度信号,可用于机器人测量二维平面的方向,确定嗅觉机器人的航向角。该磁阻传感器的信号调理电路如图5所示。

图5 磁阻传感器信号调理电路
1.1.5 音频采集单元
本设计采用4个麦克风组成阵列实现声音采集与声源定位,麦克风阵列在机器人上的分布如图6所示。音频放大电路采用MAX9812专用音频放大器实现对麦克风输出信号的放大,如图7所示。音频编码电路采用TLV320AIC23B音频编码器实现,原理如图8所示。
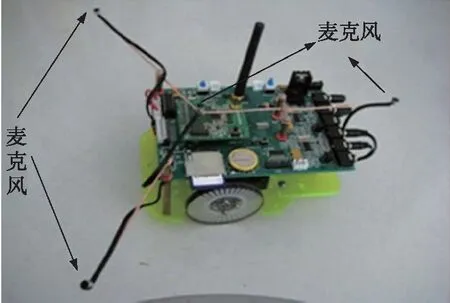
图6 麦克风阵列在机器人上的分布
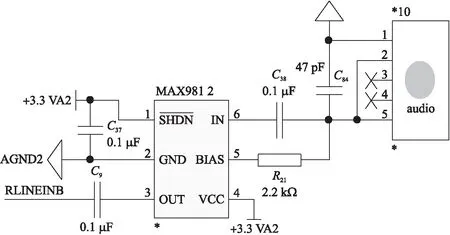
图7 音频放大电路
1.1.6 无线传输模块
每个嗅觉机器人上都装配有无线通信模块并与上位机Sink节点一同组成无线传感器网络进行信息交互。用户可通过上位机对嗅觉机器人进行控制,而嗅觉机器人的信息也可以反馈到上位机。本设计采用Chipcon公司生产的CC2430无线通信模块,是一种以经典8051微处理器为内核的无线单片机,如图9所示。

图8 音频编码电路

图10 电机驱动电路

图9 无线传输模块
1.1.7 电机驱动模块
本设计中机器人的运动利用TI公司生产的L293D驱动芯片对两个直流减速电机进行驱动,电机驱动电路如图10所示。
1.2 软件设计
1.2.1 嗅觉搜寻DSP软件设计
图11所示为机器人嗅觉搜寻DSP软件流程图。
1.2.2 听觉搜寻DSP软件设计
图12所示为机器人听觉搜寻DSP软件流程图。

图11 嗅觉搜寻DSP软件流程图
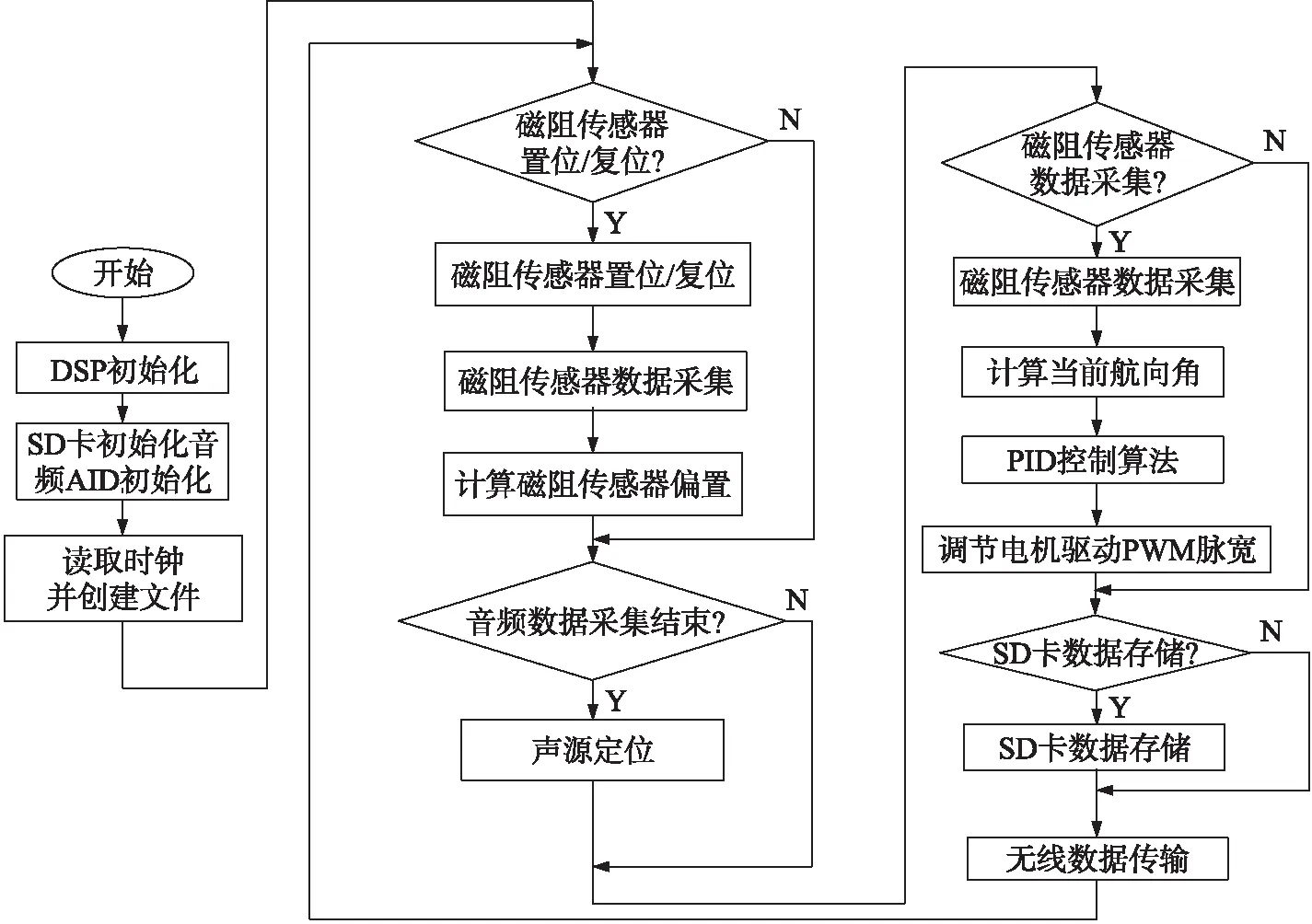
图12 听觉搜寻DSP软件流程图
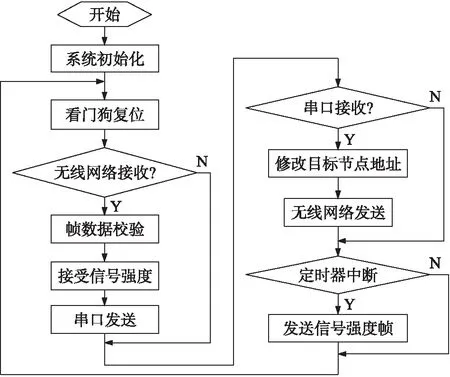
图13 无线通信单元软件流程图
1.2.3 无线通信单元软件设计
无线通信单元实现了机器人与上位机(Sink节点)的无线数据传输,构成无线传感器网络,传输信息包括移动机器人的航向角,气体传感器和风速传感器采集的数据,声源方向角,无线网络信号强度,搜寻结果等,同时上位机利用无线传感器网络对机器人进行控制。无线通信单元软件流程如图13所示。
2 气源搜寻算法
2.1 半随机移动法
半随机移动法类似于细菌的化学趋向性,仅采用单独一个气体传感器进行不同点的气场浓度检测,通过逻辑判断,使机器人总向着浓度增大的方向运动。虽然采取类似细菌的化学趋向性的算法(机器人每走一步判断当前位置与前一步位置的浓度大小,以决定继续前进或者调转方向),可以大大降低硬件电路的复杂度,但搜寻时间长,成功率较低。半随机移动法可以提高成功率,降低时耗,而占用的存储空间也很小,只需存储最近3个点的RS/R0。算法原理如下所述:
①无风条件下
首先让机器人随机前行,测得一条直线上3个点处的RS/R0值(RS为在气场中气体传感器的阻值,R0为在纯净空气中的气体传感器阻值)。然后根据三点RS/R0的不同确定下一步小车的移动方向。机器人的运动方式只有4种,前进,后转180°,左转和右转。设三点浓度分别为a,b,c。
算法表述如下:
若c
若c>b,则继续前进;
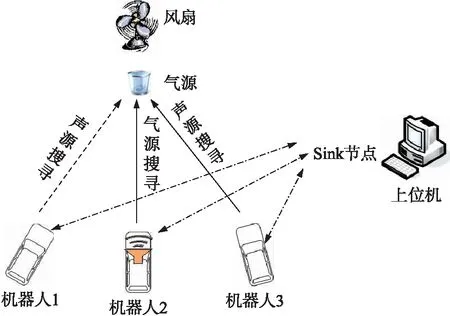
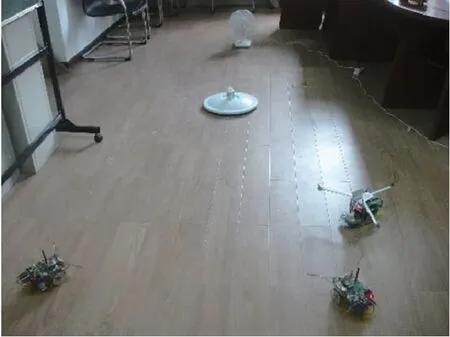
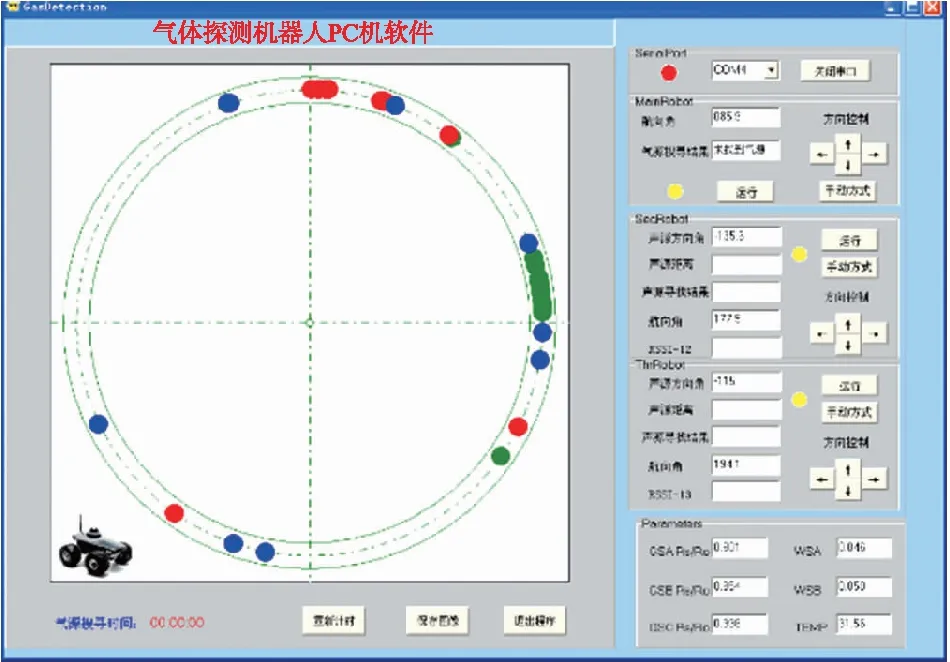
若c 此算法能保证机器人一直向浓度增大的方向移动。 ②有风条件下 在有风的情况下,气体烟羽的形状将有很大变化,虽然采用半随机移动法仍然可行,但是效果与一些结合风向信息的搜寻方法相比却相差很远。例如在有风的条件下,利用风速或者风向传感器使机器人迎风运行,即逆风方向运动。因而在此条件下,对机器人的控制只要保证它在气体烟羽范围之内运行就可以实现气源搜寻。因此,在有风条件下,结合气体浓度信息和风向信息进行算法设计是一个较好的选择。当风向一定时,风的方向大致就是气体浓度梯度分布方向,故沿着逆风方向能以最快的速度向气源移动,其搜寻原理可以表述为:设置一个气体传感器灵敏度(RS/R0)域值,当高于该值时,则认为失去了烟羽。在机器人探测到RS/R0小于阈值时,机器人认为自己处在烟羽中,它将根据风速或者风向传感器沿着逆风的方向运动,当高于规定的域值时,就认为丢失烟羽,通过绕圈等运动方式迅速地重新找到烟羽。这种搜寻算法用伪代码表示为: While(SearchFlag) { If(Concentration>LimitVal) FollowWind; Else SearchPlume; } ①无风条件下 无风条件下,采用3个气体传感器阵列,均匀分布,并与机器人的运动方向垂直。在搜寻过程中,只要保证作为参考的传感器输出信号在不断增大,基本就可以保证机器人能够沿着烟羽的中心运动,并最终寻找到气源。令3个传感器的输出信号依次为a,b,c,其控制原理可以表示如下: While(SearchFlag) { if(b>a&&b>c) MoveForward; Else if(c>b>a) TurnLeft(60°); Else if(a>b>c) TurnRight(60°); } 机器人按照这一搜寻方式的行走路线类似于雄性飞蛾的“之”字形搜寻方法,具有较高的效率,但是3个传感器之间的距离是一定的,不可变的,所以当气体浓度较高,在传感器方向上没有太大的浓度差时,此搜寻方法效果将会很差,而采用“之”字形搜寻方法,可以通过增加搜寻半径的方式,寻找浓度差,避免此种情况的发生。 ②有风条件下 在有风的情况下,在上述方法的基础上再增加两个风速传感器,机器人通过风速,气体浓度两个信息来搜寻气源。基本方法是先在一定区域内按照预先设定的浓度阈值寻找到气体烟羽,然后逆风运行,两种搜寻状态在机器人处于烟羽和离开烟羽时进行转换。当机器人处于烟羽中时,为提高气源搜寻的准确率,其运行方向由左右两个气体传感器输出差和两个风速传感器的输出差融合控制。 声源定位分为麦克风阵列的时延估计和基于时延的声源定位两个部分,采用广义互相关法实现麦克风间的时延估计,并结合麦克风之间的相对物理位置,利用球形定位法求得声源位置,下面分别介绍广义互相关时延估计[13]和球形定位法[14]。 假设两麦克m1和m2,在没有混响的情况下,两麦克接受到同一声源的信号x1(n)和x2(n)为: x1(n)=a1s(n-τ1)+w1(n) (1) x2(n)=a2s(n-τ2)+w2(n) (2) 式中:τ1、τ2为两麦克风相对声源的时延,w1(n)、w2(n)为不相关的高斯白噪声。 声源到两麦克的信号x1(n)和x2(n)的互相关函数R12(τ)可表示为 R12(τ)=E[x1(n),x2(n)] (3) 将式(1)和式(2)代入式(3),因为w1(n)和w2(n)是不相关的高斯白噪声,s(n)和w(n)也是不相关的随机信号,可得 R12(τ)=E[a1a2s(n-τ1)s(n-τ2-τ)] (4) 由相关函数的性质得,当τ=τ1-τ2取最大值。因此求得R12(τ)的最大值对应的τ就是两麦克间的时延τ12。 由互相关函数与互功率谱的关系可得: (5) 式中:G12(ω)为麦克信号x1(n)和x2(n)间的互功率谱,因此可通过先求得互功率谱,然后经过逆变换求得互相关函数。 噪声和语音的短时处理导致R12(τ)的峰值不明显,降低了时延τ12估计的精度。为了锐化R12(τ)的峰值,可通过在频域内对互功率谱G12(ω)加权来抑制噪声和混响的影响,此时再反变换到时域求得时差τ12。 本系统每个机器人上采用了4个麦克风,对4个麦克任取一对,可求的6对时延,即麦克i对麦克j的时延dij,并将麦克1作为是否有语音的检测麦克。现以麦克风1和2为例,采用图14的流程估计麦克1、2时延。 图14 改进的广义互相关法流程图 利用广义互相关法实现麦克风阵列时延估计后,球形插值法根据多个麦克对的时延及物理位置求得一组方程,并在满足最小均方误差准则下解这个方程组,就可得到声源位置的估计值。 任取一对麦克mi、mj,其与声源S的几何关系如图15所示。其中,ri是mj到mi的矢量,rs是mj声源S的矢量,dij是声源S到麦克mi和mj间的距离差(由时延估计计算),Ri=|ri|,Rs=|rs|。 图15 麦克mi、mj和声源S的几何关系图 由矢量几何和三角形三边关系可得 (6) 将式(6)展开并整理得 (7) 由于dij是通过估计时延得到的,与实际值相比有一个偏差,因此式(7)不为零,其误差为 (8) 假设有M个麦克,记为(0,1,…,M-l),则可以估计出第(l,…,M-1)个麦克到第0个麦克的距离差,从而得到M-1个方程,当均方误差为最小时,声源的估计值rs即为声源的最佳估计值。 图16 多机器气源搜寻系统实验原理图 单一气体泄漏源搜寻多机器人实验系统工作过程如下:如图16所示,在场地中摆放气源,在气源后方放置一台风扇,使挥发的气体在风扇气流的作用下快速地形成一个比较稳定的气场(烟羽)。首先,嗅觉机器人根据3个方向上气体传感器采集气体浓度的不同,向浓度较大的方向寻找气场(烟羽)的方位。当气体传感器检测的气体浓度达到所设浓度阈值时,可判定机器人处于气场中。然后,通过嗅觉机器人将气体传感器和风速传感器的检测数据,按照既定策略进行融合处理,利用融合的结果对气源方位做出初步判定并依此判定结果运动,直至找到气源为止。当嗅觉机器人寻找到气源以后,安装其前端的报警装置会触发报警,此时在距离报警声源一定距离处的另外两个机器人会利用声源定位算法从不同方向对报警声源位置进行搜寻,以达到对嗅觉机器人“增援”的目的。在整个系统的工作过程中,3个机器人可以同时对各自所需的信号进行采集、处理、识别,并将检测结果通过无线传感器网络发送到Sink节点,PC机将采集处理的数据和搜寻结果显示在控制面板上。图17为气体泄露源搜寻实验现场。图18所示为气源搜寻多机器人系统上位机软件界面。如19所示为嗅觉机器人典型气源搜寻路径。 图19 嗅觉机器人典型气源搜寻路径 图17 气体泄漏源搜寻实验现场 图18 气源搜寻多机器人系统上位机软件界面 ①气场要求 气场稳定时间需要约5 min,风速≥1.5 m/s。当气场使用15~20 min后,由于气场中被测气体浓度趋于一致,会使定位误差较大。 ②气源搜寻 嗅觉机器人与气源的距离最大为2 m,嗅觉机器人完成一次搜寻 移动距离约为20 cm,每次变向旋转约45°,完成一次气源搜寻时间约2 min~3 min,当触点传感器接触到气源边缘时,启动报警功能,此时认为嗅觉机器人找到气源,气源搜寻次数小于10就可找到气源。 ③声源定位 机器人小车离声源距离最大为2 m,声源定位的角度范围为-180°~+180°全向定位,声源定位精度为±10°,当有较强的语音干扰源时,定位误差较大。 ④声源搜寻 机器人完成一次搜寻移动距离约为30 cm,声源搜寻次数小于10就可找到声源。 ⑤实时性要求 嗅觉机器人移动到新位置会停止5 s,气体和风速传感器采集数据的时间为10 s,通过CCS的Profile工具,完成算法的时间约为2 s,每次移动时间为3 s,故嗅觉机器人完成一次搜寻的时间约为20 s。机器人对声源的语音信号采集时间为2 s,通过CCS的Profile工具,听觉机器人完成算法的时间约为3 s,机器人每次移动时间为3 s,故听觉机器人完成一次搜寻的时间约为8 s。通过对实验结果的统计,在开始位置距离气源2 m之内的距离,泄露源定位的准确率达到90%以上。 本文设计并实现了一种易燃气体泄漏源搜寻多机器人系统,研究了基于气体传感器和风速传感器相融合的气源搜寻算法和基于麦克风阵列的声源定位方法,利用无线传感器网络实现机器人之间的协同工作。实验结果表明,该系统能够有效地在工作距离为2 m之内的空间有效地实现单一泄露源的定位,平均搜寻时间20 s以内,准确率达到90%以上。2.2 多传感器融合控制法
3 声源搜寻算法
3.1 广义互相关时延估计法
=a1a2Rs[τ-(τ1-τ2)]
3.2 改进的广义互相关法

3.3 球形插值定位法

4 实验与分析

5 结论
