基于DSP的声源定向系统设计*
2018-07-09周荣艳
李 孟,周荣艳
(南阳理工学院,河南 南阳 473000)
0 引 言
声音感知技术具有全向性、探测距离较远、不受光线影响,且由于采用被动探测方式,具有隐蔽性强、不易受电子干扰、成本低和安全性高等特点,近年来日益受到研究人员的重视[1-2]。现有的声音感知技术主要是使用麦克风阵列来实现声音感知。受限于单一麦克风阵列声源定位系统的特点,该类系统虽然基本实现了声源目标的探测和定位,但由于传感器阵列孔径有限,系统在目标距离估计方面存在较大误差,使得定位效果不是很理想。同时,在一些应用场合如区域安防监控、抢险救灾等,单一声源定位系统在功能性能上显得力不从心。分布式声源定位技术作为当下声源定位系统的热门研究方向,具有探测范围广、定位精度高、系统可靠性强等优势,一定程度上弥补了单一阵列的不足[3-4]。李晓飞等设计的机器人可以根据声源定向的结果调整自身姿态,使头部摄像头转向说话人,采用视觉定位进一步提升了目标的定位性能[5]。2009年,河北工业大学陈涛等提出了利用机器人头部结构对声源信号的影响和转动自由度进行声源前后方位的判断,结合耳廓结构进行声源目标水平方位和俯仰角度的计算,借助机器人声音感知系统和机器人头部自由度,利用多种定位线索,多角度多方面实现了三维空间目标方位估计[6]。声源定位技术在军事领域也有广泛应用,如枪声定位识别系统、直升机和装甲车声源目标跟踪系统等[7],都具有良好的效果。
本文介绍一种基于测向交叉算法的声源定向系统设计,采用TMS320F2812处理器,在Code Composer Studio 5.5集成环境上开发设计[8]。声源定向采用基于平面四元十字阵列的广义互相关时延定向算法,通过获取声源目标中相对于系统中传感器节点的方向信息和各个阵列节点的坐标信息,实现目标声源的方位估计。该设计采用测向交叉定向算法,分别获得方向角与方位角的信息发送至微控制器进行定向。
1 测向交叉算法
测向交叉定位方法[9]通过测量方向角,利用几何的方法确定目标位置。如图1所示,平面内的两个传感器阵列节点S1和S2,其间距远远大于传感器节点的阵元间距。假设两节点测得的方向角分别为θ1和θ2,从节点S1和S2沿着θ1和θ2的方向作直线,则两条线的交点M即为目标位置。由于存在测量误差,估计的目标位置M与真实位置N存在一定误差。

图1 两节点测向交叉定位模型
当平面内的节点数目增加时,情况会更复杂。图2为同一平面内的S1、S2、S3三个节点组成的三角阵模型。假设三个十字阵测得的角度分别为θ1、θ2和θ3,则三条定向线L1、L2、L3会围成一个三角形ABC,目标很大可能出现在三角形内。假设三角形ABC内点P为目标的估计位置,可以通过取三角形ABC的重心、垂心、内心、外心和旁心等方法确定P点的位置。

图2 三节点测向交叉定位模型
下面以取三角形的重心为例,计算P的位置。
在XOY坐标系中,令节点S1、S2、S3的坐标分别为 (x1、y1)、(x2、y2)、(x3、y3),则:

整理,可得:

其中
假设三条直线L1、L2、L3的交点A、B、C的坐标分别那么从式(2)所示的方程联立方程组,可以解得:
设BC、AC、AB的中点D、E、F的坐标分别为则:
则得到目标探测器的等效距离为:

假设各个节点测量的方向角的标准差分别为Δθ1、Δθ2、Δθ3,当 Δθi非常小时,目标到定向线的距离等效为:

根据Jacobin定理,已知三定向线交点
其中 i=1、2、3。和可以得到目标点P的位置为:

其中,为决定性因子:
以上是2个或3个节点对目标声源的定位。当节点数量为3个以上时,通过几何方法确定声源位置的计算复杂度将大大增加,此时通常用最小二乘算法进行求解。
当有N个节点时,假设其坐标分别为估计的定向结果为则用最小二乘法得到的目标位置为则:

其中:

通过上述推导分析可知,测向交叉算法通过获取声源目标相对于系统中不同麦克风阵列节点的方向信息和各个麦克风阵列节点的坐标位置信息,实现目标方位估计,因此计算量小、实时性强[10]。
2 声源定向系统设计
声源定向为基于声源定向单元TMS320F2812处理器的嵌入式软件,在Code Composer Studio 5.5集成环境上开发设计[11]。声源定向软件包含声音信号采集、声音信号预处理和声源定向三个主要模块。
程序启动后,从main函数开始,按图3所示流程执行。程序执行完系统初始化后,进入while(1)死循环。随后一直在while(1)中反复执行,除非被定时器CpuTimer0中断打断。在中断发生后,在定时器中断服务函数中调用数据采集模块进行数据采集。执行完定时器中断服务函数后,返回主程序while(1)中刚刚被打断的位置继续执行。当完成特定点数的声音信号采集后,关闭定时器中断,调用信号预处理模块对声音信号进行预处理和检测。当检测到目标声音信号后,置位信号检测标志位,中断服务子函数结束,程序返回主程序调用声源定向模块进行声源定向。图3为声源定向软件的主程序流程。

图3 声源定向软件主程序
2.1 声音信号采集
本系统中,模数转换芯片AD7606-4工作在并行接口模式下,同步采集。在TMS320F2812的定时器CPU_Timer0周期触发下进行A/D采样,定时器周期设置为50 μs,保证数据采样率为20 kSPS。在定时器中断服务函数中,TMS320F2812通过引脚GPIOF11向AD7606-4的引脚CONVSTA和CONVSTB输出一个下降沿,控制AD7606-4芯片开始AD转换。
当数据转换完成后,AD7606-4芯片BUSY引脚产生一个上升沿,以触发TMS320F2812外部中断1。TMS320F2812在外部中断1的服务子函数中,通过读取存储空间Zone2的任意地址(0x80000~0x100000之间),使外部接口XINTF控制的片选引脚和自动产生相应的时序波形。此时,TMS320F2812从数据总线XD[15:0]即可依次读取4个通道的来自AD7606-4并行数据接口DB[15:0]的采样转换数据。
2.2 声音信号预处理
实际中,麦克风阵列接收到的声音信号为包含噪声和混响的非平稳宽带信号。单个阵元接收到的信号信噪比不高。处理前一般先对声音信号进行去均值归一化、加窗分帧和端点检测[12]。声音信号预处理流程如图4所示。
2.2.1 去均值归一化
由于声源到各个麦克风的距离和各个麦克风的一致性都存在差异,导致不同的麦克风接收到的声音信号存在较明显的幅度差异。本系统中将AD采样得到的原始数据累加求和取平均得到信号近似的直流分量,其次将原始数据减去该直流分量得到信号序列,最后将得到的序列统一除以序列的最大值实现归一化。
2.2.2 加窗分帧
通常认为,10~30 ms的时间里,声音信号近似为平稳信号。本系统使用长度为N的矩形窗w(n)截取信号,得到短时信号序列。矩形窗w(n)的定义如下:

本文中N取256点。在20 kSPS采样率下,对应每一帧的持续时间为12.8 ms,近似为平稳信号。

图4 声音信号预处理流程
2.2.3 端点检测
实际中,声源目标的出现是随机的,如果对接收到的信号不加区分,连续处理必然造成系统资源的浪费。同时,可以通过合理的端点检测,尽可能获得声音信号的直达波信号,避免混响和反射对系统声源定向的干扰。本系统采用短时能量和短时过零率的双重门限检测声音信号。
2.3 声源定向
声源定向模块采用基于平面四元十字阵列的广义互相关时延定向算法。该算法具体分为时延估计和声源定向两部分。
2.3.1 时延估计
广义互相关时延估计算法的基本原理,如图5所示。设xi(n)、xj(n)为麦克风阵列中的某两路信号,FFT表示快速傅里叶变换,( )*表示共轭运算,Hij(ω)为频域加权函数。频域差值可以提高定向分辨率,IFFT表示快速傅里叶逆变换,|·|表示取实部运算,τij表示两信号时延差[13]。

图5 广义互相关函数法时延估计原理
此算法可以表示为:

其中Gxixj(ω)为xi(n)与xj(n)之间的互功率谱。在工程应用中,一般根据噪声、混响以及接收到的信号特点,选择合适的加权函数使具有尖锐的峰值,通过峰值检测得出两路信号的时延差
考虑到PHAT(Phase Transform)加权在噪声抑制效果、运算量、实时性等方面的优异性能,以及本文针对的声源类型,采用基于PHAT加权的广义互相关算法。PHAT加权函数[13]如下:

带入式(22),得到:

图6为在DSP计算得到某两路信号的广义互相关波形。
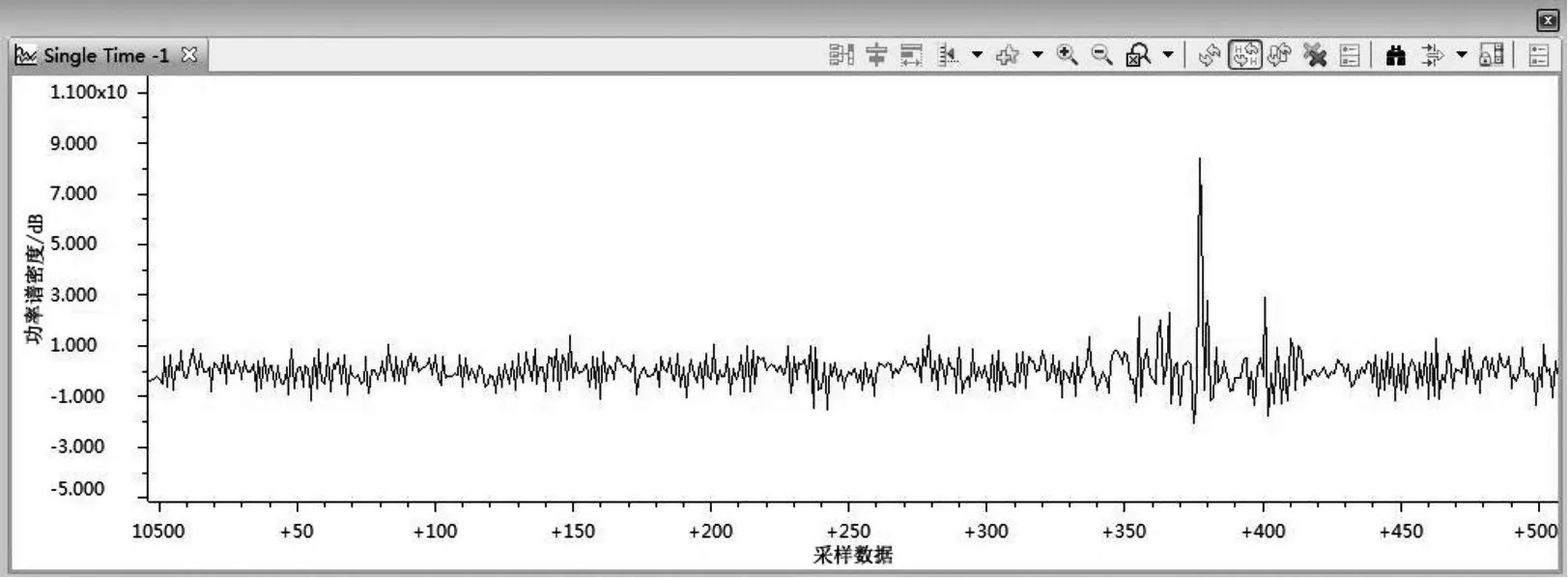
图6 在DSP中计算得到某两路信号的广义互相关波形
2.3.2 声源定向
声源目标的方向角φ与时延τij之间的关系为:

将上述时延估计得到的时延τij带入式(24),即可计算得到声源目标方向角。
3 仿真分析
本实验在室外空旷场所进行,大小为30 m×30 m,现场背景噪声属于安静级(40~50 dB)。标定参考坐标系,选取大小30 m×30 m的正方形区域,以正方形中心为圆心,用米尺辅助得到半径为15 m、10 m、5 m的三个同心圆。选取同心圆其中的一条直径作为0°(180°)参考线,逆时针依次选取45°、90°、135°、180°、225°、270°、315°、360°半径线,与15 m、10 m、5 m同心圆得到24个交点,选为声源放置点。将调试好的单个目标声源放置在圆心位置,通过串口线与电脑相连。
将声源依次放在选取的声源放置点位置上,开启声源定位系统,打开串口调试助手,声源连续播放拍手声。每个位置通过串口记录50条以上的定位结果,包括声源方位角ϕ和俯仰角θ,如图7所示。调试窗口的每一条数据,最前面三位是声源定向的序号,中间数据是计算得到的声源方位角ϕ,后一个数据是声源俯仰角θ,中间以逗号间隔。

图7 声源定向系统实验数据
本系统主要关心声源方位角,通过分析声源在15 m处时计算得到的声源方位角,得出系统定向性能如表1所示。表1对定向结果与真实角度误差小于1°的测试结果视为正确,大于1°视为错误。可以看到,在信噪比较高的情况下,系统整体定向性能稳定,精度较高。
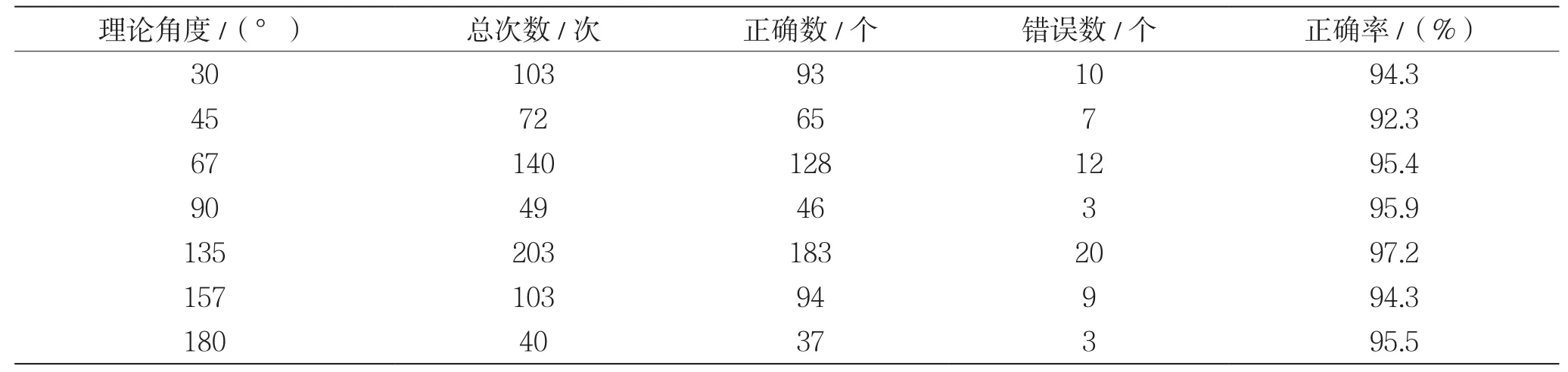
表1 静止声源定向性能分析
4 结 语
本文介绍了一种基于TMS320F2812处理器的声源定向系统,主要包括声音信号采集、声音信号预处理和声源定向三个模块。声源定向采用基于平面四元十字阵列的广义互相关时延和测向交叉定向算法,通过获取声源目标中相对于系统中传感器节点的方向信息和各个阵列节点的坐标信息,实现目标声源的方位估计。该设计通过采用广义互相关时延与测向交叉定向算法,分别获得方向角与方位角的信息发送至微控制器进行定向。实验结果分析表明,本设计在信噪比较高的情况下,系统整体定向性能较稳定,精度较高。
[1] HUANG Jie,Tadawute S,Ikutaka T,et al.A modelbased Sound Localization System and Its Application to Robot Navigation[J].Robotics and Autonomous Systems,1999,27(04):199-209.
[2] Valin J M,Michaud F,Hadjou B.Robust Localization and Tracking of Simultaneous Moving Sound Sources Using Beam-forming and Particle Filtering[J].Robotics and Autonomous Systems,2007,55(03):216-228.
[3] 闫青丽.非平稳声源稳健分布式定位技术研究[D].西安:西北工业大学,2015.YAN Qing-li.Study on Non-stationary Sound Source Robust Distributed Location Technology[D].Xi'an:Northwestern Polytechnical University,2015.
[4] 马驰.声源分布式实时定位技术研究[D].西安:西北工业大学,2014.MA Chi. Research on Distributed Real-time Location of Sound Sources[D].Xi'an:Northwestern Polytechnical University,2014.
[5] 李晓飞,刘宏.机器人听觉声源定位研究综述[J].智能系统学报,2012,7(01):9-20.LI Xiao-fei,LIU Hong.Summary of Research on Robot Auditory Source Localization[J].Journal of Intelligent Systems,2012,7(01):9-20.
[6] 陈涛,张明路,付灵丽.移动机器人空间声源目标定位[J].计算机应用研究,2009,26(10):3703-3705.CHEN Tao,ZHANG Ming-lu,FU Ling-li.Spatial Source Localization of Mobile Robots[J].Application Research of Computers,2009,26(10):3703-3705.
[7] 程萍.稳健的宽带声源实时定向技术研究[D].西安:西北工业大学,2012.CHENG Ping.Research on Robust Broadband Sound Source Real-time Orienting Technology[D].Xi'an:Northwestern Polytechnical University,2012.
[8] 伏智超.基于Cortex-A8嵌入式系统的声源定位技术研究与实现[D].南京:东南大学,2015.FU Zhi-chao.Study and Implementation of Sound Source Location Based on Cortex-A8 Embedded System[D].Nanjing:Southeast University,2015.
[9] 汪珺.测向交叉定位技术[J].电子科技,2011,24(07):129-132.Wang Hao.Determination of cross-positioning technology[J].Electronic Science and Technolo gy,2011,24(07):129-132.
[10] Tamai Y,Kagami S,Amemiya Y,et al.Circular Microphone Array for Robot’s Audition[C].IEEE International Conference on Sensors,Vienna,Austria,2004:565-570.
[11] 郑红,隋强强,周星.DSP应用系统设计实例[M].北京:北京航空航天大学出版社,2008.ZHENG Hong,SUI Qiang-qiang,ZHOU Xing.Design Example of DSP Application System[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2008.
[12] Rodemann T,Ince G,Joublin F,et al.Using Binaural and Spectral Cues for Azimuth and Elevation Localization[C].IEEE/RSJ International Conference on Intelligent Robots and Systems,2008:2185-2190.
[13] Aarbi P.Self-localizing Dynamic Microphone Arrays[J].IEEE Transactions on System, Man, and Cyberneti cs,2002,32(04):474-484.
[14] Simmons R,Smith T,Bernardine D M,et al.A Layered Architecture for Coordination of Mobile Robots[J].Multi Robot Systems from Swarms to Intelligent Automata Proceedings from the Nrl Workshop on Multi Robot Systems,2002:103-112.
