一种基于地标的星敏感器低频误差在轨校正方法
2018-07-06庞博李果黎康汤亮
庞博 李果 黎康 汤亮
(1 北京控制工程研究所,北京 100190)(2 北京空间飞行器总体设计部,北京 100094)
我国对地观测卫星正在向着高轨高分辨率发展[1],这就需要姿态确定系统提供高精度的姿态信息。目前常用的姿态确定系统由星敏感器和陀螺组成,星敏感器受空间热环境影响产生的低频误差,在很大程度上影响了有效载荷的指向以及遥感图像的处理质量。通过对星敏感器低频误差进行在轨校正,就能获得准确的卫星姿态信息,实时响应并完成用户的成像任务。
星敏感器的低频误差主要是指星敏感器在太阳照射角度变化下,光轴指向发生运动,从而产生的周期性误差,这已经在“星上自主项目”(PROBA)卫星、先进对地观测卫星(ALOS)卫星和天绘一号等多个卫星的传输数据中发现[2-4]。哨兵2号卫星[5]将星敏感器低频误差建模为一阶高斯-马尔可夫过程,通过协方差调整对星敏感器的低频误差进行滤除,但是模型未能完全体现低频误差的变化趋势,校正效果有限。文献[6-7]对星敏感器的低频误差进行了功率谱分析和识别,并将星敏感器的低频误差建模为傅里叶级数形式,设计了扩维卡尔曼滤波对低频误差进行在轨校准,这种方法的校准精度主要受陀螺测量精度的影响。空间技术实验和气候观测(STECE)卫星上搭载着ASTRO-10星敏感器,文献[8]根据星敏感器遥感数据,将傅里叶变换和Vondrak滤波方法相结合,拟合出接近真实四元数的参考值,但并未对低频误差参数进行估计,只适用于地面事后高精度姿态处理。文献[9]分析了低频误差与陀螺常值漂移之间的耦合影响,并基于此设计了一种两步双向平滑事后处理算法,但是处理过程计算量较大且仅适用于离线处理形式。由于对地观测卫星可以通过有效载荷获取角秒级的地标方向矢量数据,文献[10]采用批处理的方式,基于最小二乘算法估计星敏感器的低频误差参数。
在上述研究的基础上,本文提出了一种新的星敏感器低频误差在轨校正方法,利用有效载荷提供的地标信息,同时对卫星姿态、陀螺常值漂移和星敏感器低频误差参数进行估计。本文首先建立了由陀螺、星敏感器和地标信息组成的姿态确定系统模型,其次根据系统模型的线性-非线性形式,推导了简化的平方根容积卡尔曼滤波(SRCKF)算法,进一步减低了算法的计算时间,以便适合在轨实现。最后本文通过仿真验证了算法的校正效果,为高精度的姿态确定系统设计提供参考。
1 姿态估计模型
1.1 姿态运动学模型
采用陀螺和星敏感器进行组合定姿,需要根据姿态运动学建立系统方程,通过滤波算法进行姿态确定,得到卫星实时的姿态信息。陀螺是星体姿态基准,仅考虑常值漂移和测量噪声时,其角速度测量模型为
(1)

当卫星的姿态误差足够小且忽略二阶小量时,误差四元数矢量部分的运动学方程可写为
(2)

1.2 星敏感器测量模型
星敏感器可以通过测量视场内恒星相对于卫星本体坐标系的方位,确定星体相对于惯性坐标系的姿态。星敏感器的测量模型具有多种形式,分别具有不同的测量误差特性。本文根据星敏感器的光轴矢量形式,建立的测量模型为
li=AT(q)lb+vST
(3)

对地观测卫星绕地球旋转,受光照影响,其所在的空间热环境会呈现周期性的变化,如图1所示。而星敏感器的低频误差主要由空间热环境的变化引起,表现为周期与轨道周期相近的周期性信号。通过星敏感器的安装矩阵,星敏感器低频误差可从星敏感器测量坐标系下转换为卫星本体坐标系下,表现为欧拉角的周期性扰动信号。

图1 空间热环境变化示意图
(4)
式中:ω0=2π/T是轨道角速率;T是轨道周期;t为时间;αxj、βxj、αyj、βyj、αzj和βzj(j=1,…,M)是低频误差的傅立叶系数;M为低频误差傅立叶级数的阶数。实际的低频误差校正过程中,可根据低频误差轮廓拟和的精度要求,对M进行适当的调整。
式(4)可写为
p=Φ·δp
(5)
式中:Φ为傅里叶函数矩阵;δp为傅里叶系数矩阵。
(6)
(7)
式中:c1=cos (1×ω0t);s1=sin (1×ω0t)。
1.3 地标信息模型
地标是具有显著结构特征的地物,如海岸线、岛屿和湖泊等。通过对地遥感卫星上的有效载荷,可以得到包含地标信息的标准图像,在与地标模板图像进行匹配后,由地标的地理坐标数据和卫星质心的轨道数据可以计算得到卫星质心到地标的方向矢量在惯性坐标系下的表示ri。利用有效载荷的成像几何模型和安装矩阵,可以观测到卫星质心到地标的方向矢量在星体坐标系下的表示rb。具体如图2所示。

图2 地标几何模型
ri和rb均为单位向量,考虑测量误差的存在,地标信息可以建模为
(8)

2 低频误差在轨校正方法
2.1 在轨校正系统模型
传统的姿态确定系统模型选取卫星姿态和陀螺常值漂移作为状态量,利用高精度的星敏感测量值,对陀螺漂移进行校正。而这种姿态确定方法没有考虑星敏感器的低频误差,本文利用状态扩维的方法,将低频误差的傅里叶系数矩阵扩充为状态,同时对卫星姿态、陀螺常值漂移和低频误差的傅里叶系数进行估计,以削弱星敏感器低频误差的影响。借助有效载荷,引入地标信息作为测量值,加快低频误差系数的收敛,提高姿态确定的精度。

(9)
式中:F为线性系统状态转移矩阵,Γ为系统噪声驱动阵,wp为零均值高斯白噪声。
(10)
为了获得准确的姿态信息,根据双矢量定姿原理,通常选用两个或两个以上不平行的光轴矢量作为测量信息。本文所采用的星敏感器测量模型和地标信息模型具有一定的相似性,但只有星敏感器的测量信息受低频误差的影响。假设有两个星敏感器和两个地标,则观测方程可以写为
(11)
2.2 简化SRCKF算法
由于在轨校正的模型是非线性模型,为了提高数值的稳定性和精度,本文引入了SRCKF算法。SRCKF算法是一种采用贝叶斯理论描述后的非线性状态估计方法,直接用协方差矩阵的平方根形式,其在滤波过程中进行递推更新,可以降低计算复杂度,保证协方差矩阵的非负定性,提高滤波的收敛速度和数值稳定性[11]。
考虑如下离散非线性系统
(12)
式中:xk和zk分别为非线性动态系统在k时刻的n维状态向量和m维测量向量;f(·)和h(·)为非线性的状态函数和测量函数;wk-1和vk为互不相关零均值高斯白噪声,对应的协方差分别为Qk-1和Rk。
SRCKF算法的核心在于计算高斯加权的多维非线性函数积分,而通过容积准则,引入容积点和对应权值,可将笛卡尔坐标系下的积分计算转换为某个多维几何体的容积计算。
SRCKF算法主要可以分为时间更新和量测更新两个部分,其中时间更新的计算过程如下。
1)容积点
(13)

2)容积点传播
(14)
3)状态预测均值
(15)
式中:wu为基本容积点向量ξu对应的权值。
4)状态预测误差协方差矩阵的平方根矩阵
(16)

SRCKF算法适用于如式(12)所示的非线性系统,本文所提的星敏感器低频误差在轨校正系统模型由式(9)和式(11)组成,其中状态方程为线性形式,测量方程为非线性形式。为了使SRCKF算法更适应在轨校正系统模型,可以利用线性的处理方法对时间更新过程进行改进。
根据式(9),将式(13)和式(14)带入到式(15)中,有
(17)

(18)

(19)
用式(17)和式(19)代替SRCKF算法中的时间更新部分,即可得到基于线性-非线性系统模型的简化SRCKF算法。

tSR=(4n3+2n2+2n)t1+(4n3+
4n2+2n)t2+9n2t3
(20)
tSSR=(n3+n2)t1+(n3+n2)t2+4n2t3
(21)
对比式(20)和式(21)可以发现,简化SRCKF算法明显降低了时间更新过程的计算时间,有利于算法的实时运行。对于线性的状态方程,简化SRCKF算法与SRCKF算法具有相同的数值理论估计精度,并且因为降低了QR分解中矩阵的维数,使得简化SRCKF算法具有更高的数值稳定性。
2.3 在轨校正方法实施

采用地标信息对星敏感低频误差进行校正时,需要将地面典型地标库存储为模板图像,后续与卫星载荷拍摄的图像进行识别和处理均通过星上计算机来完成。如果星上计算机的计算能力有限,也可以将遥测数据传往地面站,在地面处理得到星敏感低频误差的信息,再上传到卫星上进行校正。但由于非在轨实时校正,校正精度会有所下降。

图3 在轨校正方法Fig.3 On-orbit calibration method
3 仿真分析
以三轴稳定对地观测卫星作为算例进行仿真,假定卫星运行在轨道周期为100 min的近圆轨道上。陀螺的常值漂移设为[1.0 1.2 -0.8]T(°)/h,陀螺的角度随机游走系数和角速率随机游走系数分别是1.5×10-4(°)/h1/2和6.5×10-2(°)/h3/2。星敏感器的测量噪声由光轴方向的随机噪声和低频误差组成,其中随机噪声的标准差为1″,低频误差的轮廓基于在轨遥测数据建立,可采用典型的误差参数进行拟合,如表1所示[7]。有效载荷的采样周期为15 min,每次观测两个地标点,获得两个地标信息,两个地标点之间的角距为6°,每个地标信息的测量误差标准差为1″。令陀螺和星敏感器的采样周期为1 s,地标点的采样周期为15 min,滤波周期为1 s,仿真时长为5个轨道周期。在轨校正方法中,状态量里包含三个周期的所有低频误差系数。

表1 典型低频误差系数
首先,不对星敏感器的低频误差进行校正,观察星敏感器低频误差对姿态精度的影响。即采用传统的卡尔曼滤波方法,直接利用陀螺的输出数据和含有低频误差的星敏感器输出数据进行姿态确定,获得的卫星姿态误差如图4所示。从图4中可以看出,三轴都存在明显的周期信号,且周期与星敏感器低频误差的周期相似,说明传统的姿态确定方法无法消除星敏感器低频误差的影响。
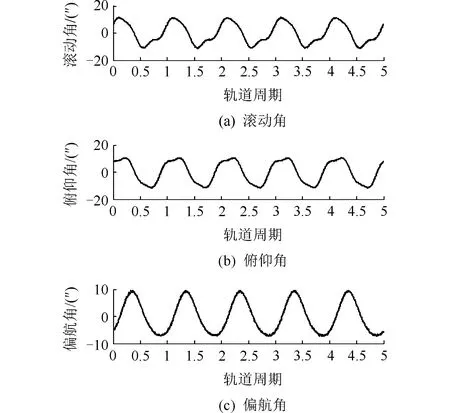
图4 无星敏感器低频误差补偿的卫星姿态误差Fig.4 Satellite attitude errors without star sensor LFE compensation
其次,验证在轨校正方法的有效性。本文提出的简化SRCKF方法,结合有效载荷提供的地标信息,对星敏感器的低频误差进行在轨校正。为了验证校正方法中加入地标信息的有效性,采用观测量中无地标信息的在轨校正方法进行对比,获得的三轴姿态误差如图5~7所示。
通过图5~7可以看出,分别采用两种方法得到的卫星姿态误差在稳定后都已无明显的周期项,且姿态确定的精度具有显著提升。其中采用无地标信息校正方法得到的姿态误差约在2个轨道周期后达到稳定,采用有地标信息校正方法下得到的姿态误差约在1.3个轨道周期后达到稳定。相比于未加地标信息得到的姿态误差,加入地标信息后得到的姿态误差在滚动轴和俯仰轴上波动较小、稳定度较高,但其在偏航轴上姿态误差反而增大。这是由于多个类似光轴形式的地标信息之间无法具有足够的角距,来对偏航方向的姿态误差进行有效的几何约束,才导致偏航轴的姿态误差较大。为了更准确的描述星敏感器低频误差补偿后姿态确定的精度,表2中给出了几种仿真情况下,卫星三轴姿态误差的均方根。可以看出,采用有地标信息的在轨校正方法会将姿态估计误差降低40%以上。
最后,分析当地标信息的测量误差标准差增大时,对在轨校正方法的影响。令地标信息的测量误差标准差由1″增加到2″,三轴姿态误差均方根也随之明显增大,见表2,可以看出,采用地标信息时,地标信息的测量误差标准差应当小于等于星敏感器随机误差的标准差。

图5 滚动姿态误差比较Fig.5 Comparison of roll attitude error

图6 俯仰姿态误差比较Fig.6 Comparison of pitch attitude error

图7 偏航姿态误差比较Fig.7 Comparison of yaw attitude error

类型姿态误差均方根/(″)滚动角俯仰角偏航角无低频误差校正3.694.002.87无地标在轨校正0.320.270.30有地标在轨校正0.130.162.12有地标在轨校正(地标测量误差标准差增大)0.370.271.75
通过几次仿真对比可以发现,本文所提基于地标的低频误差在轨校正方法在滚动轴和俯仰轴上具有最高的姿态确定精度。虽然该方法的姿态确定精度在偏航轴上有所下降,但仍优于未进行低频误差校正方法的姿态确定精度。校正过程中,每一次地标信息的引入,都会降低姿态误差的大小,因此当无法持续获得地标信息时,也可以采用本文所提方法对星敏感器低频误差进行在轨校正。另外,该方法的姿态确定精度受地标的测量精度影响,当地标的测量误差增大时,姿态确定的精度会相应地降低。
4 结束语
为了削弱星敏感器低频误差对卫星姿态确定精度的影响,将有效载荷观测到的地标信息引入到对低频误差的在轨校正方法中。基于在轨校正的系统模型,推导了简化的SRCKF算法,以保证算法的实时运行。仿真表明,与无地标信息的在轨校正方法相比,引入地标信息的在轨校正方法令姿态估计误差的稳定时间减少了35%,均方根降低40%以上,其改善效果与地标信息的测量精度有关。
参考文献(References)
[1] 李果, 孔祥皓, 刘凤晶, 等. “高分四号”卫星遥感技术创新[J]. 航天返回与遥感, 2016, 37(4): 7-15
Li Guo, Kong Xianghao, Liu Fengjing, et al. GF-4 satellite remote sensing technology innovation[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(4): 7-15 (in Chinese)
[2] Jorgensena J L, Denvera T, Bettoa M, et al. The PROBA satellite star tracker performance[J]. Acta Astronautica, 2005, 56(1): 153-159
[3] Iwata T. Precision geolocation determination and pointing managment for the Advanced Land Observing Satellite (ALOS)[C]// Geoscience and Remote Sensing Symposium, 2003 IGARSS. New York: IEEE, 2003: 1845-1848
[4] 王任享, 王建荣. 无地面控制点卫星摄影测量探讨[J]. 测绘科学, 2016, 40(2): 3-12
Wang Renxiang, Wang Jianrong. Discussion on satellite photogrammetry without ground control point[J]. Science of Surveying and Mapping, 2016, 40(2): 3-12 (in Chinese)
[5] Winkler S, Wiedermann G, Gockel W. High-accuracy on-board attitude estimation for the GMES Sentinel-2 satellite: concept, design, and first results[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Washington D.C.: 2008
[6] Xiong K, Zhang C Q, Liu L D. Identification of star sensor low-frequency error parameters[J]. IET Control Theory and Applications, 2012, 6(3): 384-393
[7] Xiong K, Zong H. Performance evaluation of star sensor low frequency error calibration[J]. Acta Astronautica, 2014, 98: 24-36
[8] Yuwang L, Junhong L, Yonghe D, et al. Precession-nutation correction for star tracker attitude measurement of STECE satellite[J]. Chinese Journal of Aeronautics, 2014, 27(1): 117-123
[9] 赵琳, 谢瑞达, 刘源, 等. 星敏感器低频误差与陀螺漂移离线校正方法[J]. 航空学报, 2017, 38(5): 197-210
Zhao Lin, Xie Ruida, Liu Yuan, et al. Offline calibration of star sensor’s low frequency error and gyroscope drift error[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(5): 197-210
[10] 熊凯, 汤亮, 刘一武. 基于地标信息的星敏感器低频误差标定方法[J]. 空间控制技术与应用, 2012, 38(3): 11-15
Xiong Kai, Tang Liang, Liu Yiwu. Calibration of star sensor’s low frequency error based on landmark information[J]. Aerospace Control and Application, 2012, 38(3): 11-15 (in Chinese)
[11] 李志军, 侯黎强. 一种用于实时轨道确定的NPF-SRCKF滤波算法[J]. 宇航学报, 2014, 35(7): 811-817
Li Zijun, Hou Liqiang. An improved NPF-SRCKF based algorithm for spacecraft orbit determination[J]. Journal of Astronautics, 2014, 35(7): 811-817 (in Chinese)