反舰导弹同时临空控制策略研究
2018-06-28杨华东燕永敦
杨华东, 燕永敦, 杨 侃
(1.海军工程大学兵器学院, 湖北 武汉 430033; 2. 海军研究院, 北京 100161)
0 引 言
“饱和攻击”是反舰导弹作战的一般样式[1-2],即同时从多方向、多层次向目标发射多枚导弹,使敌反导能力处于饱和状态,以提高反舰导弹的突防概率[3-4]。“同时到达”是“饱和攻击”战术实施的必要条件,如何才能实现“同时到达”,主要有以下几种技术途径:
一是控制导弹的发射顺序和发射间隔时间。不同于无人飞行器、无人潜航器等低速、长航时航行器,可以通过调节飞行速度来控制飞行时间,以达到“同时到达”的目的[5-11]。反舰导弹的飞行速度一般不进行精确控制,全程的飞行时间通常以导弹平均速度计算。因此,可以通过控制导弹的发射顺序和发射间隔时间,使得不同航程的导弹近似同时到达目标。文献[12]基于这种思想研究了不同攻击角情况下,航路的飞行时间差。这种方法优点在于实现简单,但其缺陷在于:发射平台从进入攻击阵位发射第一枚导弹开始,需要一直保持阵位,直到同一攻击波次的导弹全部发射完毕才能撤离。
二是通过航路规划控制导弹的飞行航程。即在认为导弹平均速度为定值的前提下,通过航路规划技术调节各枚导弹的航程,使得导弹的飞行航路既能满足导弹的飞行约束和突防要求,又能保证同一攻击波次所有导弹的飞行航程相等,从而使得同一攻击波次的各枚导弹“同时到达”攻击目标。文献[13]利用“椭圆上任意一点到两个焦点距离之和相等”的几何特性,将攻击舰和目标舰视为椭圆的两个焦点,提出了只有一个航路点的情况下航程相等的规划方法。文献[14]基于类似思想,研究了航路点解空间的分布。但这种方法受导弹飞行限制条件和战场环境约束,应用场合十分受限。本文针对上述两种技术途径当前存在缺陷,进行了反舰导弹同时临空控制策略探索研究。
1 海洋环境因素对导弹飞行时间修正
导弹飞行速度受大气温度、风速风向的影响存在一定的波动,对导弹飞行时间预测误差较大,会影响打击目标时临空时间的协同[15]。本文通过获取导弹飞行航路上各航路点的温度、风速、风向等海洋环境参数,进行导弹预估速度修正,分段计算各航路的准确飞行时间,从而获得总的飞行时间,用于导弹临空时间的协同计算,通过发射时序控制,精确实现同一波次攻击的导弹同时临空。
首先,通过引入海洋环境参数,查阅各个航路点所在地理位置点对应的环境温度,按照温度修正式(1),计算同一条航路中各航路点导弹修正速度Vi(i=1,2,…,n),n为该条航路的航路点总数。
(1)
式中,K0为温度修正常数;V(δZf)阵风影响速度修正常数;Ki为航路第i个航路点所在地理位置点的环境温度。
然后,依次计算发射点至第i个(i=1,2,…,n)航路点各段航路的飞行时间为
(2)

最后,按式(3)计算每条航路导弹的飞行时间。
(3)
2 基于发射间隔控制实现同时到达的方法
基于临空时间协同实现同时到达的方法实现简单,适用于单艘舰艇和编队对海火力突击。
2.1 打击单舰目标发射间隔时间控制
基于发射间隔时间控制,实现打击单舰目标协同方法,通俗地讲即为:同一攻击波次中航程大的导弹先发射,航程小的导弹后发射,技术原理如下:
设同一攻击波次中,攻击同一目标的最大航路数量为N条,设此N条航路的航程为Li,i=1,2,…,N。
按照第1节所述的方法,可求取考虑海洋环境参数化修正后的导弹飞行时间Tzi,i=1,2,…,N。
航路中飞行时间最大者为
Tmax=max(Tzi),i=1,2,…,N
(4)
于是,各航路发射间隔时间为
ΔTi=Tmax-Tzi,i=1,2,…,N
(5)
考虑到导弹最小发射间隔时间安全性约束,ΔTi取为
ΔTi=max{ΔTi,Tmin,Tc},i=1,2,…,N
(6)
Tmin为在保证武器发射安全性前提下,武器系统允许的导弹最小发射间隔时间,由武器系统战技性能决定。Tc为考虑多枚导弹连射时战术决策要求的最小发射间隔时间,由上级指挥控制系统效率决定。
设打击目标要求的临空时刻为T0,则首枚导弹的发射时刻为
(7)
同一攻击波次中,其他各枚导弹的发射时刻为
(8)
按式(8)计算的发射时刻控制导弹发射,即可保证同一攻击波次中各枚导弹同时到达目标。
现代舰艇超低空反导(硬抗击)和电子对抗(软抗击)手段日臻完善,反舰导弹突防难度很大,单一波次多弹同时到达攻击,可能也难以达成作战目的。因此,本文还考虑了多波次协同攻击的问题,各波次之间的攻击时间间隔ΔTbj(j=1,2,…,K)还应当满足以下条件:
ΔTbj=min{Tqh,Tzh,Tzt},j=1,2,…,K
(9)
式中,K为打击同一目标的最大攻击波次数量;Tqh为舰载防空导弹火力通道切换时间;Tzh为舰载末端反导火炮转火时间;Tzt为舰载电子战武器再装填时间。
2.2 打击编队目标同时临空时间控制
在临空时间协同方面,打击编队目标不同于打击单目标。针对舰艇编队目标,在实现多方向同时临空饱和攻击战术时,不能按照单舰目标的协同方法进行计算[16],而必须考虑外围舰艇与中心舰艇的协同存在距离差和临空时间差问题。如果采用按照单一目标的协同临空时间,则打击中心目标的导弹需提前发射,先穿过外围舰艇构成的火力防御体系,有可能被外围舰艇拦截,打击中心舰艇使用导弹的突防概率将下降,这不符合饱和攻击要求,也不符合对编队目标协同攻击的需求[17-18]。
如打击编队内部舰艇的导弹,为了避免被编队外围舰艇拦截,应根据不同打击目标设置不同的临空时间和临空时间差值。通常,打击编队中心目标和外围目标的临空时间要有时间差,打击近距目标和远距目标也要有时间差,最终实现对编队的同时临空协同攻击。
基于临空时间协同的打击编队目标实施方法,本文按照以下方法实现:
步骤1先计算出来的编队中心,以此中心点为参照系,计算编队各目标到中心点的距离,以此距离为突防临空的距离差值。
设编队中心点经纬度为(λ0、φ0),编队中心点取编队内各舰艇位置的经纬度(λi,φi)均值点具体计算公式为
(10)
(11)
步骤2将每个目标到编队中心的距离差值ΔLi(i=1,2,…,M)与攻击该目标的导弹航路航程Li(i=1,2,…,N)相加,获得各导弹航路到编队中心的航程值。
步骤3以各航路到编队中心点的航程为计算条件,计算按照式(1)~式(3)计算考虑海洋环境参数化修正后的各航路对应的导弹飞行时间Tzi,i=1,2,…,N,按照第2.1节所述打击单舰目标协同方法,选取最长飞行时间Tmax对应的航路为首发导弹航路。以Tmax为基准,按式(5)~式(8),可依次计算同一攻击波次中其他导弹的发射时间间隔ΔTi,并进一步可获得每条航路对应的导弹发射时间Ti,形成多发导弹同时临空攻击编队目标的导弹发射时间和发射顺序。
3 基于航程相等实现同时到达的方法
同一攻击波次各枚导弹航程相等是实现导弹同时到达的有效手段。与发射间隔控制方法相比,其最大的优势在于:同一攻击波次的导弹可同时发射,导弹发射完毕后,发射平台可迅速撤离,有助于保证发射平台安全。特别地,对飞行中有操控要求的导弹而言,航程相等可保证齐射的多枚导弹同时抵达操控区,以满足操作手可同时操控多枚导弹的要求。
基于航程相等实现同时到达的航路规划计算实现方法有两种:一是规划的航路沿弹目连线严格对称,二是采用动态椭圆的几何方法。
3.1 航路对称法
如图1所示,考虑导弹航路有3个航路点的情况,A点和A′点为末段进入方向上的点,满足|OA|≥L0,|OA′|≥L0(L0为最后一个航路点到目标的最近距离约束),B点为2条航路共同航路点,OB连线为各个末段进入方向的中间方向,A点和A′点关于OB连线对称,G为A点和A′连线的中点。

图1 三航路点对称航路示意图Fig.1 Route symmetry diagram of three navigating points
算法实现步骤设计如下。
步骤1令2条航路的末段进入方向分别为α1和α2, 则中心对称线方位为
(12)
步骤2求取2个末段进入方向的夹角的半角为
(13)
步骤3求取∠ABG的最大允许角度为
(14)
式中,θmin为导弹航路最小转角,为常数。
步骤4AA′中点G到第一航路点B的最小距离为
(15)
于是,可求得第一航路点B。
步骤5判断条件|AB|>L1(L1为相邻两个航路点之间的最小距离约束,为常数)是否成立,若不成立则伸长B点,伸长步长为e1(常数),直到条件|AB|>L1满足或总航程S超出限制为止。
步骤6若步骤5计算成功且航路AB段或AB′段碰障碍,则伸长A点,伸长步长为e2(常数),重新进行上述步骤1~步骤6,直到碰障规避成功或总航程S超出限制为止。
若上述三航路点对称计算不成功,则进行4个航路点对称计算,如图2所示。

图2 四航路点对称航路示意图Fig.2 Route symmetry diagram of four navigating points
4个航路点算法是在3个航路点算法基础上的改进,即B点绕A点向偏离中心对称轴的方向转动得到新的航路点B点和B′点,然后再按第3.1节描述的算法计算2条航路的共同航路点C,算法设计如下:
步骤6.1判断A点位于中心对称轴的左侧还是右侧,若A点位于左侧,则顺时针转动B点,否则逆时针转动B′点。
步骤6.2按无障碍物情况规划出初始航路OAB,计算B点相对A点和A′点的方位AngAB和AngA′B,此两方位即分别为B点和B′点偏离中心对称轴转动的初始方位。
步骤6.3进入B点转动循环,转动B点和B′点,转动步长ε1(常数)。
设转动后B点和B′点的中点为G,则G点经纬度坐标按如下式计算,即
(16)


步骤6.4当B点和B′点分别转过OA和OA′连线方向时,进入B点伸长循环,按B点和B′点转动后的方位伸长B点和B′点,伸长步长为e1。然后重新进入步骤6.1—B点转动循环。B点伸长循环中,如果BC段航路或B′C′段航路碰障碍,则说明B点伸长后碰障,伸长也无意义,则退出B点伸长级循环,进入B点转动级循环。
步骤6.5若步骤6.3或步骤6.4任意一步中规划的航路规避障碍物成功,则退出B点伸长和转动循环,并输出航路规划结果,规划计算结束。

3.2 动态椭圆法
航路严格对称方法实现简单,但规避障碍物能力有限,当作战海域地理环境较复杂或需要规避的障碍物较多时,航路对称法难以规划成功[19-20]。因此,本文还提出了基于动态椭圆的几何计算方法,并可保证在规避复杂障碍物条件下,航路的航程精确相等。 动态椭圆几何方法描述如下:
椭圆的几何特性:椭圆上的点到其两个焦点的距离之和相等。如图3所示,若视发射点和目标点为椭圆的两个焦点,则当导弹航路只有一个航路点且位于由发射点和目标点确定的椭圆轨迹上时,则任意两条航路的航程严格相等。

图3 椭圆几何法示意图Fig.3 Ellipse geometric method diagram
但考虑到导弹实际性能约束条件,纯椭圆几何方法的工程应用价值有限:受导弹发射扇面、导弹机动性能以及末段搜捕目标性能约束等因素影响,当航路只有1个航路点时,该航路点到目标的距离(P1B或P2B)、航路点到发射点的距离(P1A或P2A)以及航路的转弯角(∠AP1B或∠AP2B),在设计上均有严格的约束,那么椭圆上航路点P1、P2的选择空间就极其有限。尤其当航路的攻击进入角度(∠P1BA、∠P2BA)有特定要求且航路上有地理障碍物时,基于纯椭圆几何的航路规划方法则完全失效。
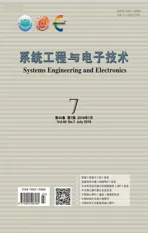
针对上述椭圆几何方法的缺陷,提出了动态椭圆航路规划算法,如图4所示。考虑飞机平台协同对海突击的情况,F点为飞机起飞位置,A点和A′点为末段进入方向上的点,B点、B′点和C点均为航路点。
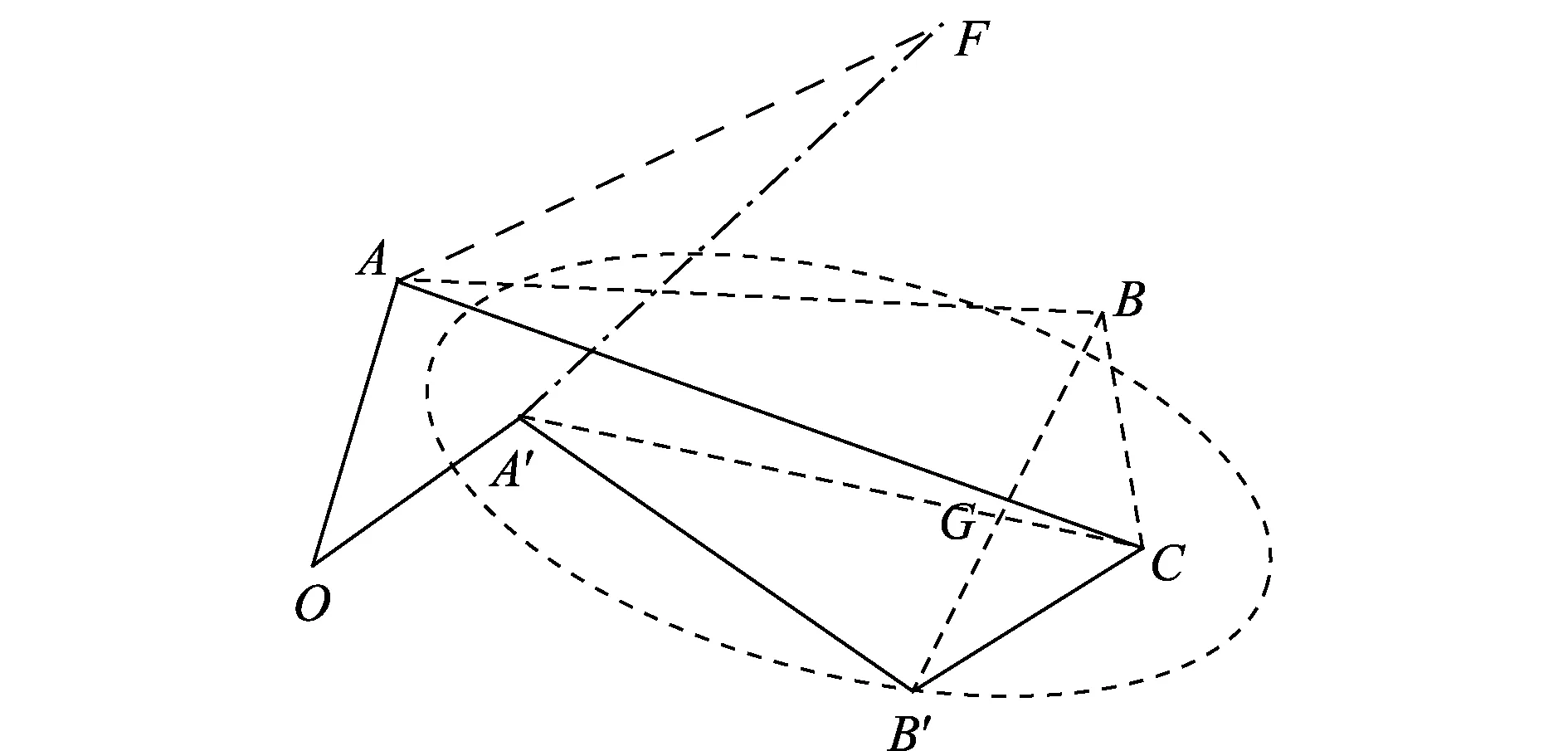
图4 动态椭圆法规划航路示意图Fig.4 Dynamic ellipse method diagram
算法实现步骤设计如下:
步骤1求解F点相对于2个末段进入点A点和A′点的方位,分别记为α1和α2。
步骤2进入B点和B′点伸长循环。求解F点—末段进入点A—目标点O构成的夹角∠FAO,并确定B点和B′点转动的初始方位β1和β2,顺时针转动时,β1和β2值为正。
(18)
然后,按B点和B′点转动的初始方位β1和β2,及|AB|=|AB′|=L1的条件计算得到新的B点和B′点,再按第3.1节中给出的算法计算得到B点和B′点的中点G点。
设两航路共同点为C。求出B点相对于G的方位为AngGC,则C点相对于G点的方位满足:
(19)
取|GC=nL1|,n为L1倍数,为常数,则可求得C点经纬度。
接着,判断C点相对于G点方位的合法性。分别求取C点到B点的距离|CB|、C点到A点距离|CA|,如果|BA|≥|CA|成立,则C点相对于G点的方位初值不合法,需要重新计算C点,即
(20)
再按|GC=n*L1|,重新计算C点经纬度,重新计算的C点必是合法的,如图4所示。

步骤4进行动态椭圆二次优化:取两条航路中航程大的那条,剔除其航路点B或B′,为保持两条航路航程相等,以A′点和C点为椭圆焦点,建立动态椭圆,B/B′点即为椭圆上的点,满足:
|A′B′|+|B′C′|=|AC|
(21)

步骤5如果航路不碰障碍且航路二次优化成功,输出航路规划结果,规划计算结束。
步骤6当以下条件任意一个满足时,退出B点伸长循环:
①航路计算成功;
②航路碰障;
③航路总航程S超出限制。
步骤7满足下列条件之一时,进入B点转动循环:
①航路碰障碍;
②航路二次优化不成功。
B点转动循环角度步长ε2,B点转动后的方位为
(22)
(23)
步骤8B点转动后,若规划成功,则说明航路二次优化规划成功,规划计算结束。
若下列条件之一被满足,说明航路二次优化规划不成功,则无解:
②航路总航程S超出限制。
动态椭圆法适用性强,当地理障碍比较复杂、禁飞区数量比较多时,航路对称算法可能无法规划,动态椭圆航路规划算法由于其灵活性强,在复杂障碍物情况下,仍可以规划出经二次优化后的导弹可飞的航路并可保证攻击同一目标的任意2条航路的航程精确相等。
3.3 航程精确计算方法
精确计算航路的航程是实现各条航路航程相等的基础,本文采用几何解析方法计算多航路点航路的航程,计算方法描述如下。
考虑多个航路点情况,如图5所示。
图5 航程计算示意图Fig.5 Schematic diagram of voyage calculation
N1、N2、N3、N4为规划的航路点,M为目标点,O1、O2、O3为航路转弯圆心,R为航路转弯半径,θ1、θ2、θ3为航路转弯圆心角。
则图5所示的4航路点航程L4满足:
(24)
由图5可导出4个航路点巡航段航程L4计算公式为
L4=|N1N2|+|N2N3|+|N3N4|+|N4M|+
(25)
进一步,可推广到n个航路点航程Ln精确计算公式为
Ln=|N1N2|+|N2N3|+|Nn-2Nn-1|+…+|Nn-1M|+
(26)
4 仿真验证
首先,在50~550 km范围内,考察了海洋环境因素对导弹飞行时间修正的效果,数据统计结果如表1所示。

表1 飞行时间误差数据统计
表中,Di表示飞行距离;ΔTw表示无修正预估飞行时间与理论飞行时间偏差;ΔTy表示有修正预估飞行时间与理论飞行时间偏差。飞行时间统计分析表明:在考虑海洋环境因素对导弹飞行时间修正条件下,按导弹飞行时间修正式(3)计算得到的导弹飞行时间计算值与导弹飞行时间的平均偏差下降到11 s,较无海洋环境因素修正的44 s平均误差有了大幅度的提高,平均临空时间差值减小了75%,按照对海洋环境参数化修正后的导弹飞行时间控制精度得到了大幅提高,有效地提高了多弹同时临空的协同攻击效果。
然后,计算了同一平台发射的多枚导弹分别沿不同的航路攻击同一目标的发射时间间隔。如表2所示。

表2 发射间隔时间计算结果

由表2统计结果可见,对拥有较大动力航程的亚声速反舰导弹(如航程大于150 km),同一攻击波次中首枚导弹发射到末枚导弹发射之间的间隔可长达数分钟,这段时间内,被攻击舰艇有充分的时间进行反导抗击准备,逐一抗击来袭导弹。若控制发射间隔时间,使得导弹同时到达目标,则有助于实现饱和攻击,提高突防效果。
最后,在考虑障碍物规避条件下(障碍物以多边形描述),按三航路点对称算法、四航路点对称算法和动态椭圆法分别计算了导弹突防航路,其中任意2条航路航程近似相等(误差小于10 m),以实现导弹同时临空,计算结果如表3所示。采用航路对称法和动态椭圆法,均具有较高的计算精度,任意2条航路的总航程差小于10 m。此外,由于本文所提出的航程相等的航路规划方法,均是基于解析几何的数学方法,有唯一解,且无迭代计算,具有支持快速计算的特点,非常适于各类平台火控实时航迹解算,也可适用于弹载或机载综控机飞行中在线航迹规划计算。

表3 航程相等实现同时临空计算结果
5 结 论
反舰导弹饱和攻击,同时到达是必要条件。本文基于导弹的发射顺序和发射间隔时间控制和通过航路规划实现导弹的航程相等两种思路,在考虑海洋环境因素对导弹飞行时间影响条件下,提出了反舰导弹“同时到达”打击单舰和编队目标的临空时间协同方法和航路规划方法,可为指挥员组织实施反舰导弹协同饱和攻击提供决策参考,提高导弹攻击和兵力行动的效率。
参考文献:
[1] 张金春, 张晶, 张书宇. 反舰导弹对海目标饱和攻击辅助决策系统研究[J]. 战术导弹技术, 2014 (2): 21-27.
ZHANG J C, ZHANG J, ZHANG S Y, et.al. Research on assistant decision-making syetem about saturation attacks of anti-ship missile to sea targets[J].Tactical Missile Technology,2014(2):21-27.
[2] 刘树衍,刘畅平,王航宇,等.伪人工势场在多弹饱和攻击航路规划中的应用研究[J].海军工程大学学报,2015,27(5):108-112.
LIU S K, LIU C P, WANG H Y, et al. Coordinative route planning of anti-ship missile saturation attack based on pseudo artificial potential field[J]. Journal of Naval University of Engineering, 2015, 27(5): 108-112.
[3] 曾家有, 王国卫, 钟建林, 等. 多平台舰舰导弹饱和攻击几个协同问题与模型[J]. 兵工学报, 2014, 35(2):256-261.
ZENG J Y, WANG G W, ZHONG J L, et al. Research on cooperative saturation attack problems and models of ship-to-ship missiles from multi-ship platforms[J]. Acta ArmamentarⅡ, 2014, 35(2):256-261.
[4] WANG G H, SUN X F, ZHANG L P, et al. Saturation attack based route planning and threat avoidance algorithm for cruise missiles[J]. Journal of Systems Engineering and Electronics, 2011, 22(6):948-953.
[5] YAO P, WANG H L, SU Z K. Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment[J]. Aerospace Scienceand Technology, 2015, 47(4):269-279.
[6] BABEL L. Flight path planning for unmanned aerial vehicles with landmark-based visual navigation[J]. Robotics and Autonomous Systems, 2014,62(2):142-150.
[7] XU C F, DUAN H B, LIU F. Chaotic artificial bee colony approach to uninhabited combat air vehicle (UCAV) path planning[J]. Aerospace Science & Technology, 2010,14(8):535-541.
[8] ZHANG X Y, DUAN H B. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning[J]. Applied Soft Computing, 2015,26(C):270-284.
[9] LUA W C, LEE M T, WANG M W. Route planning for light-sport aircraft in constrained airspace[C]∥Proc.of the 7th Asian-Pacific Conference on Aerospace Technology and Science,2013:140-146.
[10] ZHANG M, SU C, LIU Y, et al. Unmanned aerial vehicle route planning in the presence of a threat envoronment based on a virtual globe platform[J]. ISPRS International Journal of GEO-Infomation, 2016, 184(5): 1-30.
[11] 袁利平, 陈宗基, 周锐, 等. 多无人机同时到达的分散化控制方法[J]. 航空学报, 2010, 31(4): 797-805.
YUAN L P, CHEN Z J, ZHOU R, et al. Decentralized control for simultaneous arrival of multiple uavs[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(4): 797-805.
[12] 曾家有, 宋友凯, 车志宇. 基于航路规划的反舰导弹发射顺序和间隔研究[J]. 航天控制, 2009, 27(2):22-25.
ZENG J Y, SONG Y K, CHE Z Y. Research on launch sequence and interval onf anti-ship missile based on route planning[J]. Aerospace Control, 2009, 27(2):22-25.
[13] 王建国, 徐晓刚, 高军亮, 等. 航路规划技术在反舰导弹远程打击中的应用[J]. 飞航导弹, 2006 (9): 23-25.
WANG J G, XU X G, GAO J L, et al. The application of route planning technology in long range attack of anti-ship missile[J]. Aerodynamic Missile Journal, 2006(9):23-25.
[14] LIU G, LAO S Y, HOU L L, at el. OARPER-MAFO algorithm for anti-ship missile path planning[J]. Aerospace Science and Technology, 2015,47:135-145.
[15] LI F, HAO B, ZHAO J H, et al. Cruise missile multiple route planning based on hybrid particl swarm optimization[J].Journal of Beijing Institute onf Technology,2013,22(3):354-360.
[16] LIU G, LAO S Y, HOU L L, et al. A simulation system of anti-ship missile path planning oriented ship formation[J]. Advanced Materials Research, 2012, 532(6): 645-649.
[17] DESARAJU V R, HOW J P. Decentralized path planning for multi-agent teams with complex constraints[J]. Autonomous Robots, 2012, 32(4): 385-403.
[18] TAM C K, BUCKNALL R. Cooperative path planning algorithm for marine surface vessels[J]. Ocean Engineering, 2013, 57(2): 25-33.
[19] WANG Q J, PENG J, NI B H, et al. Route planning for military aircrafts based on waypoint searching method[J]. Computer Engineering, 2014, 40(2):280-283.
[20] LIU Y.Design and implementation of obstacle assessment in flight route[J].Command and Information System and Technology,2012,3(6):25-29.