非均匀线阵的互耦自校正
2018-06-28张佳佳陆晓飞季正燕
张佳佳, 陆晓飞, 陈 辉, 季正燕
(空军预警学院一系, 湖北 武汉 430019)
0 引 言
一直以来,均匀线阵(uniform Linear array,ULA)以其阵列结构简单,阵列流型具有范德蒙德矩阵结构特点备受关注,各种高分辨算法都是基于ULA发展推广而来的。在阵元间距相等的约束条件下,只要阵元数目确定,阵列孔径就确定了,分辨力也就确定了。要想提高分辨力只能增加阵元数目,这无疑大大增加了成本,而且还会引起高分辨算法计量的增加,因此为解决这一难题非均匀线阵(non-ULA,NULA)[1-2]应运而生。经过精心设计的NULA能够满足在相同阵元数的前提下拥有更大的天线孔径,进而提高波达方向(direction of arrival, DOA)分辨率。同时,相较于ULA来说,NULA更便于实现,给天线排布方式带来很大的灵活性。
类似于传统的ULA,NULA也会受到各种阵列误差的影响,尤其是阵元间的互耦误差。几十年来,涌现出很多互耦误差自校正方法。例如,文献[3-4]都是基于子空间的原理,利用互耦矩阵的特殊性,使角度和互耦系数解耦合。此类方法不需要高维非线性搜索,计算量小,但对阵列结构有要求。文献[5-6]同时运用了阵列结构特点和互耦矩阵的带状对称Toeplitz特性,结合旋转不变子空间(estimation signal parameters via rotational invariance technique, ESPRIT)算法,将角度和互耦系数分离。此类方法无需先验知识,也不需要迭代搜索。文献[7]提出了归一化空间谱的方法去除部分耦合诱导的虚假峰值,成功提高分辨力,稳健估计信号来向。文献[8]利用源信号的统计特性,由盲源分离算法估计广义阵列的阵列流型,而后利用互耦矩阵特性将DOA估计问题转化为多个可分离的非线性最小二乘问题,此类算法无需高维搜索和迭代,对互耦自由度要求低,稳健性高。文献[9]针对混合信源DOA估计和互耦误差校正提出方法。首先根据互耦矩阵特点,粗略估计独立源的DOA,而后结合斜投影和前后平滑实现DOA估计,最后利用估计的DOA,提出非子空间类的校正方法。近年来,压缩感知的方法在DOA估计方面得到广泛应用,研究者们也开始将其运用到阵列误差的校正上来。文献[10]采用了贝叶斯的方法联合估计DOA和互耦系数,充分运用到了互耦矩阵稀疏特性,但过程中仍需要迭代运算,计算量大,估计时间久。然而NULA的互耦矩阵并不具备Toeplitz特性,给NULA互耦误差自校正带来了很大的困难。文献[11]针对NULA中的最小冗余阵,将低秩恢复的思想运用到阵列协方差重构中,解决DOA估计和互耦误差问题。此方法多次运用近似思想,必然会导致估计精度下降,中间的迭代过程也会使计算量增加。文献[12]比较3种不同的NULA,针对偶极天线和微带天线,提出解决互耦误差的方法。文献[13]在单快拍情况下针对L型NULA互耦校正提出解决方法。算法推导了不具有内插变换的无互耦协方差矩阵与互耦和内插变换的协方差矩阵之间的近似优化,形成了用于互耦校正和DOA估计的全局优化问题。此方法中需要交替的优化过程计算量大。文献[14]采用了辅助信源的方法,通过选择天线构造3个分时发射的校正源,得到3个方位校正数据,联合估计互耦和幅相误差。在低信噪比(signal-to-noise ratio,SNR)情况下占优势,但误差较大或天线旋转角度小时算法会失效。同样,针对NULA的互耦和幅相误差,文献[15]不需要校正源,而是利用更一般的线性几何方法来提高估计能力,方法还可推广到非均匀圆阵中。
本文主要针对关于中心原点对称的NULA,解决DOA估计和互耦误差自校正的问题。通过分析阵列结构,发现此类阵列互耦矩阵具有关于反对角线对称的特点,可将其分解成2个具有Toeplitz特点的矩阵之差的形式,从而方便实现角度和互耦系数的解耦合,而后结合子空间原理,同时估计信号的DOA和互耦系数。算法可以有效地避免高维搜索和迭代过程,简化计算量,同时具有精度高、分辨力强的特点,可以有效地解决关于中心阵元对称的NULA互耦问题。
1 数据模型的建立
1.1 理想情况下NULA的数据模型
一个N=5的NULA位于x轴上,阵元位置为xk(k=1,2,…,5),阵列布局如图1所示,呈现出根据中心阵元对称分布的形态,其中d=0.5λ表示距离单元,λ代表波长,将原点处作为参考点。为简化推导过程,仅考虑现实中方位角的应用情况,方位角为θ∈(-180°,180°)。

图1 NULA的阵列结构Fig.1 Array structure of NULA
第k个阵元的相位差为
(1)
导向矢量可表示为
a(θ)=exp(-jβk)
(2)
整个阵列的流型矩阵为
A=[a(θ1),a(θ2),…,a(θM)]
(3)
式中,M表示信号源数。则阵列的接收数据可以表示为
X(t)=AS(t)+N(t)
(4)
式中,X(t)为数据矢量;A为理想无误差时的阵列流型矩阵;S(t)为信号矢量;N(t)为均值为0、方差为δ2的高斯白噪声(white Gaussian noise, WGN)矢量。
1.2 互耦误差存在情况下的数据模型
由文献[16]可知,互耦系数与阵元间距之间存在反比关系。当阵元间距较小时,阵元间的互耦效应强,互耦系数大;当阵元间距大到一定程度导致稀疏,阵元间的互耦效应就很小,互耦系数近似为0。根据文献[8,17],通常情况下对于线阵来说,存在互耦影响的2个阵元之间距离不会超过2.5λ。因此在本文中,假定当阵元间距大于2.5λ时,2个阵元之间的互耦为0。不同于ULA的等距分布,关于中心阵元对称的NULA的互耦矩阵不再具有Toeplitz特性,却具有以下特点:
(1) 由互易原理可知,阵元i对阵元j的互耦效应等于阵元j对阵元i的互耦效应,即
zi,j=zj,i
(5)
(2) 阵元对自身的互耦系数为1,即
zi,j=1,i=j
(6)
(3) 当2个阵元之间的距离大于存在互耦效应的最大距离p1时,互耦系数为0,即
zi,j=0,dij>p1
(7)
(4) 具有相同间距的阵元,互耦系数相同,即
zi,j=z(N+1-i),(N+1-j)
(8)
例如当互耦自由度分别为2和3时,互耦矩阵可以表示为
(9.2)
可以看出,互耦矩阵Z可以分解成两部分矩阵之差,即有
Z=D-B
(10)
式中,一部分是具有带状对称Toeplitz特性的矩阵D,可以由其第一行元素唯一表征;而另外一部分矩阵B则具有以下特性:
(1) 第1行和最后1行、第1列和最后1列均为0。
(2) 除掉特性(1)中为0的行和列,剩下的矩阵仍具有带状对称的Toeplitz特性。
因此,当互耦存在时,整个阵列的接收数据可表示为
X(t)=ZAS(t)+N(t)
(11)
在快拍数L有限的情况下,阵列协方差矩阵可表示为
(12)

2 互耦自校正算法
2.1 原理描述
设互耦自由度为p,则互耦系数矢量z=[g1,g2,…,gp]T,此时阵列流型矩阵为
[Za(θ1),Za(θ2),…,Za(θM)]
(13)
当互耦存在时,根据子空间原理,多重信号分类(multiple signal classification, MUSIC)算法的谱估计可表示为
(14)
若采用联合搜索来估计角度和互耦系数,搜索维数由无互耦时的一维变为(p+M-1)维,计算量很大,无法满足实时处理要求。根据式(10),Z可分解为两部分之差,则有

Da(θ)-Ba(θ)=T1[a(θ)]z-T2[a(θ)]z
(15)
式中,T1和T2分别代表矩阵D和B所对应的重构矩阵。因矩阵D具有带状对称的Toeplitz特点可知,T1可表示为
T1=Ta+Tb
(16)
(18)

当p=2时
(19)
(20)
(21)
当p=3时
(22)
(23)
(24)
当p=4时
(25)
(26)
(27)
随着p值的增大,重构矩阵T1和T2的表达式越来越复杂,但他们的表达式是唯一确定的。将得到的T1和T2代入式(15)整理可得
(28)
将式(28)代入式(14)可得
(29)

zHQ(θ)z=0
(30)
很显然,互耦误差的存在使得z≠0,那么式(30)成立的条件就是N×p维矩阵Q(θ)出现秩损。当且仅当方位角为真实信号来向时,满秩矩阵Q(θ)才会变成奇异阵。因此,对信号角度的估计便可由式(31)或式(32)来完成。
(31)

(32)
式中,λmin[·]和det[·]分别为求矩阵最小特征值和矩阵行列式的算子。而后利用角度估计值,结合式(33)进一步估计互耦系数。
(33)
式中,emin[·]表示求矩阵最小特征值对应的特征矢量。
2.2 算法步骤
NULA互耦自校正(self-calibration of mutual coupling for NULA, SCNL)算法的基本步骤如下:

步骤2通过式(16)~式(27)分别获得相应的重构矩阵T1和T2;
步骤3根据式(28)构造重构矩阵T,并求得Q(θ);


3 仿真分析
一个5元NULA位于x轴上,阵元位置如图1所示,其中d=0.5λ,λ为波长,噪声为零均值WGN,在方位角度12°和16°的方位上存在2个非相干信号源。令整个阵列的互耦自由度为p=3,互耦系数矢量为z=[1;0.882 1+0.658 3j;-0.347 6+0.146 9j]。
实验1NULA互耦校正空间谱图
当快拍数为300,图2(a)和图2(b)分别表示在不同SNR情况下,互耦未知、互耦已知、经典自校正(简称WF)算法及本文提出的2种方法的空间谱曲线的比较。

图2 空间谱图Fig.2 Spatial spectrum
由仿真结果可以看出,当互耦误差存在时,普通的MUSIC算法完全失效。WF算法可以估计DOA,但是SNR较小的情况下测得的角度偏离实际值较远,精度相对较差。而本文提出的SCNLE和SCNLD算法与互耦已知时的MUSIC算法均可以在信号来向处形成一个尖锐的峰值,准确地估计信号的DOA。实验说明了本文算法的有效性,在SNR较低时,本文算法的性能要优于WF算法。
实验2角度估计性能分别与SNR和快拍数的关系
当快拍数为300,SNR从0 dB变化到30 dB,间隔2 dB,通过100次蒙特卡罗仿真实验,比较互耦已知、WF算法、SCNLD算法、SCNLE算法的角度估计性能随SNR变化的关系。这里限定算法能同时分辨出2个独立信源,并且估计偏差小于0.5°时视为成功。图3给出了4种算法成功概率的比较。

图3 成功概率与SNR的关系Fig.3 Relationship between success probability and SNR
图4则给出了4种算法均方根误差(root mean square error, RMSE)随SNR的变化关系。

图4 RMSE与SNR的关系Fig.4 Relationship between RMSE and SNR
同理,当SNR为10 dB不变情况下,快拍数从10变化到510,图5和图6分别给出了4种算法的成功概率和RMSE随快拍数变化的关系。
整体来说,SCNLD和SCNLE算法的估计性能相差不大。由图3和图5可知,当SNR较低时,本文算法的成功概率低于互耦已知的MUSIC 算法,但明显优于WF算法,当SNR大于10 dB以后或快拍数大于300,本文算法百分百成功。由图4和图6可知,SCNLD和SCNLE算法的RMSE均略大于互耦已知的MUSIC算法的,小于WF算法。

图5 成功概率与快拍数的关系Fig.5 Relationship between success probability and thenumber of snapshot
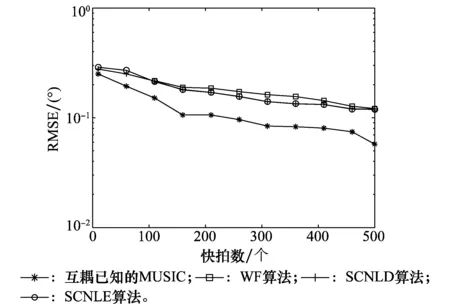
图6 RMSE与快拍数的关系Fig.6 Relationship between RMSE and the number of snapshot
实验3互耦系数的估计
本实验考察了SCNLE算法对互耦系数的估计性能。定义互耦系数矢量的相对校正误差为
(34)


图7 互耦系数的校正误差随SNR变化的关系Fig.7 Relationship between correction error of mutual coupling coefficients and SNR
图8则表示当SNR为10 dB,快拍数从10到510时,互耦系数的校正误差随快拍数的变化。

图8 互耦系数的校正误差随快拍数变化的关系Fig.8 Relationship between correction error of mutual coupling coefficients and the number of snapshot
通过100次蒙特卡罗实验,表1、表2显示了在快拍数为300时,不同SNR情况下得到的互耦系数的估计。

表1 互耦系数g2的估计(真值0.882 1+0.658 3j)

表2 互耦系数g3的估计(真值-0.347 6+0.146 9j)
实验结果表明,随着SNR的增加,ε值会越来越小。当SNR大于15 dB时,互耦校正误差趋近0值。同样,ε也会随着拍数的增大而逐渐变小,最终趋近0值,说明估计出的互耦系数值十分接近真值。
4 结 论
本文针对关于中心阵元对称的五元NULA,提出互耦自校正算法。通过对NULA整体结构的分析,发现其互耦矩阵具有关于反对角线对称的特点,并且可将其分解成2个矩阵之差的形式。其中的一个是具有带状对称Toeplitz特性的矩阵,而另外一个矩阵除掉边框为0的行和列,也具有Toeplitz矩阵的特性,这样一来就可以方便地构造出合适的重构矩阵,实现角度和互耦系数的解耦合,而后根据子空间原理,就可实现DOA的估计和互耦系数的求解。本文所提算法不需要额外的辅助阵元和辅助信源,同时可以有效降低搜索的维数,减少运算量,在角度相隔较近的情况下仍然具有较高的估计精度,很好地解决了NULA的互耦问题,具有较大的实际意义。
参考文献:
[1] KWIZERA E, MWANGI E, KONDITI D B. Direction of arrival estimation based on MUSIC algorithm using uniform and non-uniform linear arrays[J]. Journal of Engineering Research and Application, 2017, 7(3): 51-58.
[2] 张阳,王新民.基于非均匀线性阵列双远场信源DOA估计的最小分辨率极限[J].系统工程与科学技术,2017,39(3):465-470.
ZHANG Y, WANG X M. Minimum resolution limit of dual far-field sources DOA estimation with a non-uniform linear array[J]. Systems Engineering and Electronics, 2017, 39(3): 465-470.
[3] LIU K H, ZHENG Z, YANG H F, et al. An approach to robust beamforming in the presence of mutual coupling for uniform linear arrays[C]∥Proc.of the 2nd IEEE International Conference on Computer & Communications, 2017: 1870-1874.
[4] DAI J S, XU B, NAN H, et al. A recursive RARE algorithm for DOA estimation with unknown mutual coupling[J]. IEEE Antennas and Wireless Propagation Letters,2014,13(5):1593-1596.
[5] LI H B, GUO Y D, GONG J, et al. Mutual coupling self-calibration algorithm for uniform linear array based on ESPRIT[C]∥Proc.of the International Conference on Consumer Electronics, 2012: 3323-3326.
[6] LIU S, YANG L S, YANG S Z, et al. Blind direction-of-arrival estimation with uniform circular array in presence of mutual coupling[J]. International Journal of Antennas and Propagation, 2016, 2016(8): 1-7.
[7] CAI S. A normalized spatial spectrum for DOA estimation with uniform linear arrays in the presence of unknown mutual coupling[C]∥Proc.of the International Conference on Acoustics, Speech and Signal Processing, 2016: 3086-3090.
[8] 胡增辉,朱炬波,何峰,等.互耦条件下均匀线阵DOA盲估计[J].电子与信息学报,2012, 34(2): 382-387.
HU Z H, ZHU J B, HE F, et al. Blind DOA estimation in the presence of mutual coupling using uniform linear array[J]. Journal of Electronics & Information Technology, 2012, 34(2): 382-387.
[9] 景小荣,杨洋,张祖凡,等.均匀线阵混合信源DOA估计与互耦误差自校正[J].系统工程与电子技术,2014,36(9):1696-1701.
JING X R, YANG Y, ZHANG Z F, et al. DOA estimation for mixed signals and mutual coupling self-calibration for uniform linear array[J].Systems Engineering and Electronics,2014,36(9):1696-1701.
[10] WANG Q, DOU T D, CHEN H, et al. Effective block sparse representation algorithm for DOA estimation with unknown mutual coupling[J].IEEE Communications Letters,2017,21(12): 2622-2625.
[11] 曹圣红. 存在阵列误差条件下波达方向估计算法研究[D]. 合肥: 中国科学技术大学, 2014.
CAO S H. Direction of arrival estimation algorithms in the presence of array error[D]. Hefei: University of Science and Technology of China, 2014.
[12] BOUDAHER E, AHMAD F, AMIN M G, et al. Mutual coupling effect and compensation in non-uniform arrays for direction-of-arrival estimation[J]. Digital signal processing, 2017, 61(c):3-14.
[13] HOU Y G, ZHANG T Y, WU S C. An optimization estimation for mutual coupling correction of L-shaped nonuniform array with single snapshot[J]. Mathematical Problems in Engineering, 2015, 2015(3): 1-11.
[14] LI W X, LIN J Z, ZHANG Y, et al. Joint calibration algorithm for gain-phase and mutual coupling errors in uniform linear array[J]. Chinese Journal of Aeronautics, 2016, 29(4): 1065-1073.
[15] DAI J S, ZHAO D, YE Z F. DOA estimation and self-calibration algorithm for nonuniform linear array[C]∥Proc.of the International Symposium on Intelligent Signal Processing and Communication Systems, 2010: 1-4.
[16] 王永良,陈辉,彭应宁,等.空间谱估计理论与算法[M].北京:清华大学出版社,2004:392-406.
WANG Y L, CHEN H, PENG Y N, et al. Theory and algorithm of spatial spectrum estimation[M]. Beijing: Tsinghua University Press, 2004:392-406.
[17] DAI J S, XU W C, ZHAO D A. Real-valued DOA estimation for uniform linear array with unknown mutual coupling[J]. Signal Processing, 2012, 92(9): 2056-2065.