多段连续结构的外骨骼手指功能康复机器人
2018-06-21朱圣晨李敏徐光华谢俊何博赵晨光袁华
朱圣晨,李敏,2,徐光华,2,谢俊,2,何博,赵晨光,袁华
(1.西安交通大学机械工程学院,710049,西安; 2.西安交通大学机械制造系统工程国家重点实验室,710054,西安; 3.中国人民解放军空军军医大学(第四军医大学),710032,西安)
手功能健全是人能否独立生活的主要因素[1],丧失部分或全部手指运动能力将使人无法正常完成日常生活动作,降低患者的生活质量[2],中风后手指肌无力是手功能丧失的主要表现,导致手指无法伸展[3]。研究表明,对中风患者进行持续高强度的重复训练有助于手部运动功能的康复[4]。传统的中风康复治疗中,需要治疗师与患者进行一对一的手把手式康复治疗,这种方法不仅成本高、劳动量大,而且无法保证康复训练效果和强度,缺乏康复训练参数,导致无法对训练参数优化来获得最佳治疗方案[5]。近年来,机器人技术越来越多地应用于康复训练,人们期望机器人能够提供比人工治疗更好的训练和定量的评估恢复状态。研究表明,患者在机器人辅助下进行一定强度的重复康复训练可以显著改善手部运动功能[2]。康复机器人装置除了是一种康复治疗辅助手段,还可为永久性失去手功能或手功能减弱的这一部分中风患者提供帮助。
手功能康复机器人可以分为端点交互式和外骨骼式。端点交互式的装置通常位于手掌背侧,向指尖施力帮助手指运动[6]。然而,这种类型的设备无法使患者利用触觉信息自然地与感知对象接触[7]。外骨骼式手功能康复装置与患者手绑定,并且具有运动耦合的特点。由于手的多功能性和复杂性,开发用于康复和辅助手运动的手部外骨骼机器人具有一定的挑战性[1,8],如何设计出适应各种手大小的外骨骼装置是近年来面临的挑战之一。目前,手指康复外骨骼已经成为康复工程及机器人学科的一个研究热点方向[9]。
手的外骨骼装置主要使用线驱动、连杆驱动和液压-气动驱动机构[10],见图1。基于连杆的刚性机械设计广泛应用于手的外骨骼驱动装置[11-12],这一结构具有良好的鲁棒性与可靠性[8,10]。然而在运动过程中,连杆结构的旋转中心难以和人手指关节中心时刻保持对准,因此需加入位置补偿[10]。目前的补偿方式不可避免地增加了连杆机构的复杂性和冗余性[13]。另外,刚性机械设计也会引发患者的使用安全问题,使得设备的使用需要在专门的监管下进行[10]。此外,具有连杆机构的手部外骨骼驱动装置的尺寸、质量、机械复杂度等往往会导致操作难度加大[8]。上述缺点使得这种外骨骼驱动装置的实际应用困难重重。

图1 多段连续结构外骨骼手功能康复机器人
软体机器人作为机器人发展的新兴领域受到越来越多的关注[14]。软体手外骨骼多采用硅橡胶制造的液压-气压驱动装置协助手指进行屈曲或伸展运动,这样的驱动方式使设备的结构变得简单紧凑[10,15]。然而,气动-液压驱动需要气压源或液压源等装置,增加了整个系统的尺寸。此外,由于超弹性材料的非线性变形,使得控制器的设计变得异常困难[15],而且材料的膨胀问题可能会导致设备寿命周期缩短[15]。双向驱动的手指屈曲和伸展,对于手部功能康复装置至关重要[7,10,15],而大量现有装置仅提供手指屈曲运动辅助。
与连杆结构相比,线驱动机构模拟实际人类手指运动驱动,并且大大减小手部外骨骼装置的尺寸[16-17]。然而,线驱动只能单向传递力,如果要具有双向驱动的功能,结构可能会变得很复杂。为了能使线驱动机构具有双向驱动的功能,Borboni等人提出了使用双向驱动套索的手部外骨骼装置,其中套索内线在伸展运动期间可线驱动工作,并且在屈曲期间看作是固定在手套远端的弯曲柔性梁[17]。但是,线驱动机构会受到摩擦、线拉伸等问题的困扰[7-8],Arata等试图通过具有3层滑动弹簧机构的外骨骼手来解决这些问题[8]。
为了开发辅助患者进行手指功能康复的外骨骼机器人,本文提出了一种由单层弹簧片驱动的多段连续结构的新型外骨骼手功能康复机器人,旨在协助患者在接近正常人手指运动的范围内进行拉伸、屈曲运动,并且在手指尖产生足够的协助力。由于多段连续体结构的固有特点,外骨骼与人手指指尖无需联合对准,从而增强了设备的简单性和灵活性。此外,装置良好的柔顺性使人与手部外骨骼指尖的相互作用更加安全,可以将线性运动转化为手指关节的旋转运动。该手部外骨骼康复机器人的特征包括:低复杂性、紧凑性、双向制动、低成本、便携性以及安全的人机交互。
1 结构设计
1.1 设计需求
本设计的目标用户是无法自主进行屈曲、伸展手指运动但其他上肢关节包括手腕、肘部和肩关节功能完好的人。为了达到手部康复的目的,外骨骼应该使使用者在日常生活中获得最小的干扰,并且能够产生足够的力量,以协助使用者在手指正常或稍微小的运动范围内进行屈曲和伸展。该手功能康复外骨骼装置用于协助患手进行连续被动运动(CPM)康复训练。CPM理论是指在治疗师或康复机器人的帮助下,在规定的时间长度内按预定顺序被动地移动患者关节的一种康复训练方法。施加在患者关节的外力不应大于生理值,并且应严格遵守关节自身运动的自由度(DOF)[17]。CPM理论已被证明对神经受损的病人有效[18],同时CPM康复训练不要求高精度的运动轨迹[17]。
为了实现最小的运动干扰,外骨骼被限制在手指的背面,宽度不应超过手指宽度。在本设计中,手指背面的外骨骼的几何尺寸被约束至20 mm。目前,手功能康复外骨骼的质量普遍在3~5 kg[10]。手功能康复系统如果要在更广泛的中风人群中使用,减小系统的质量显得尤其重要[19],本文外骨骼的目标设计质量需低于1 kg。
手功能康复外骨骼必须具有3个弯曲自由度来锻炼手指的3个关节,即近指关节(PIPJ)、掌指关节(MCPJ)和远指关节(DIPJ)。对于一些康复应用,只需覆盖手指的运动范围,每根手指的MCPJ、PIPJ和DIPJ都不必具有独立的运动。大拇指、食指、中指的3指尖捏动作需要食指的MCPJ、PIPJ和DIPJ分别弯曲46°、48°和12°[16]。对于康复训练的手指运动速度,治疗师建议手指关节屈曲、伸展周期的时间低于20 s[17]。必须注意的是,应该始终避免所有这些关节的过度伸长。
手功能康复外骨骼对手指施加的力量应能够使其进行正常的康复训练,此外在患者指尖处产生的指尖力应达到患者操纵常用物体所需的抓握力,完成一些功能任务所需的指尖力通常低于20 N[20]。Polygerinos等人的研究表明,外骨骼在每根手指的指尖产生约7.3 N的力,可以实现握拳动作及拾取质量小于1.5 kg的物体[19]。现有的康复设备可以提供7~35 N的输出力[16-17,19]。
为了满足不同患者情况,本设计允许通过定制来适应不同的尺寸和不同的康复阶段。
1.2 设计概念
根据既定的设计要求,本文设计并制造组装了该手功能康复外骨骼。在设计中,每个手指由一个直线推杆电机驱动手指伸展和弯曲,从而使得整体结构变得紧凑。本文提出的一种具有弹簧片的多段连续结构具有良好的柔顺性,可以避免运动过程中手指关节中心和传统连杆结构中心存在偏差的问题。如图2所示,弹簧片由直线推杆电机提供的直线运动输入而滑动和弯曲,整体结构变形弯曲。当该外骨骼附着在手指背面时,可以协助手指进行屈曲、伸展运动,但是目前的结构并不适用于拇指内收和外展。
基于以上的机构设计,我们开发了一个手指外骨骼原型机,见图1。本设计采用魔术贴使手功能康复外骨骼的手指驱动器与手套结合,因此医师或者患者可以很方便地更换不同的驱动器。
多段连续结构由VisiJet Crystal材料制成,使用3D打印技术成型(3D打印机型号为3D Systems MJP3600)。电机装载台和固定装置使用3D打印机(D3020,Shenzhen Sundystar Technology Co.,Ltd,中国)打印,材料为ABS树脂。原型机整机包括手套质量为165.4 g,远低于设计质量(1 kg)。
本设计中使用了两种型号的直线推杆电机,参数如表1所示。弹簧片的厚度和长度分别为0.3 mm和80 mm,宽度略小于外骨骼宽度。多段连续结构的单个小块的尺寸为12 mm×10 mm×5 mm。

图2 多段连续体弯曲示意图

表1 直线推杆电机参数
2 原型机特性实验
本文测定了实验对象佩戴该原型机后的左手食指各个关节的运动范围及手指的指尖力,初步评估了该原型机的性能。
2.1 关节角度测试
本文实验对象为一位24岁的男性,测试手为左手,手指关节角度定义见图3a。为了得到进行屈曲、伸展运动时手指关节的运动范围,本文使用了VICON运动捕捉系统记录运动过程。该系统具有10个T40 MX摄像机,采样频率为500/s,将9 mm直径的红外标记球附着到健康的被试者的手指关节处,如图3b所示。在主动运动环节,被试者进行主动的手指弯曲和伸展运动,弯曲和伸展运动的起点和终点均为手指与掌背平行,得到被试者主动运动时关节运动的最大范围。在被动运动环节,被试者带上该外骨骼原型机进行手指的弯曲和伸展运动,图4为各关节上的红外标记点的运动轨迹。
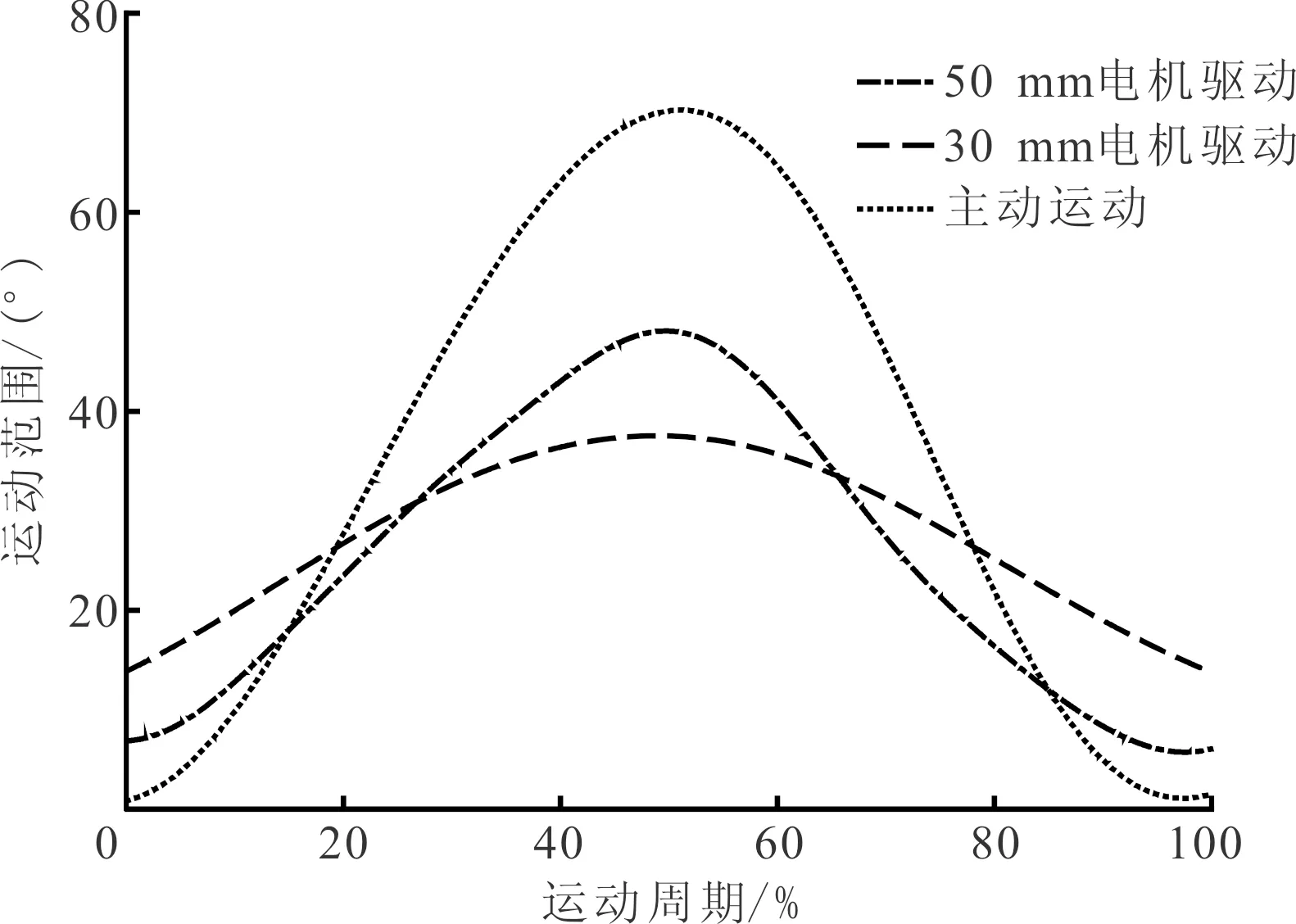
将单个关节的被动角度范围与主动运动的关节角度范围进行比较,结果如图4、图5以及表2所示。主动运动和被动运动实验均进行5组,每组实验包含10次食指屈曲、伸展运动循环。使用行程为30 mm的直线推杆电机(L12-30-100-12-I)时,远指关节可以达到主动运动时的最大运动范围的61.2%,近指关节可以达到最大运动范围的46.9%,掌指关节可以达到最大运动范围的45.5%。接着计算了被动运动达到关节最大角度时处于一个循环周期的时间位置。这3个关节的角度达到最大时分别位于一个循环周期的50.1%、48.8%和51.8%,基本处于一个循环周期的中间时刻,符合健康人手的运动规律。
使用行程为50 mm的直线推杆电机(L12-50-210-12-I)时,远指关节可以达到主动运动时的最大运动范围的78.1%,近指关节可以达到最大运动范围的66.9%,掌指关节可以达到最大运动范围的79.4%。计算发现,被动运动时这3个关节的角度达到最大时分别位于一个循环周期的51.6%、49.7%和50.1%,也基本符合健康人手的运动规律。

(a)关节角度定义示意

(b)红外标记点图3 关节角度定义及红外标记点示意图
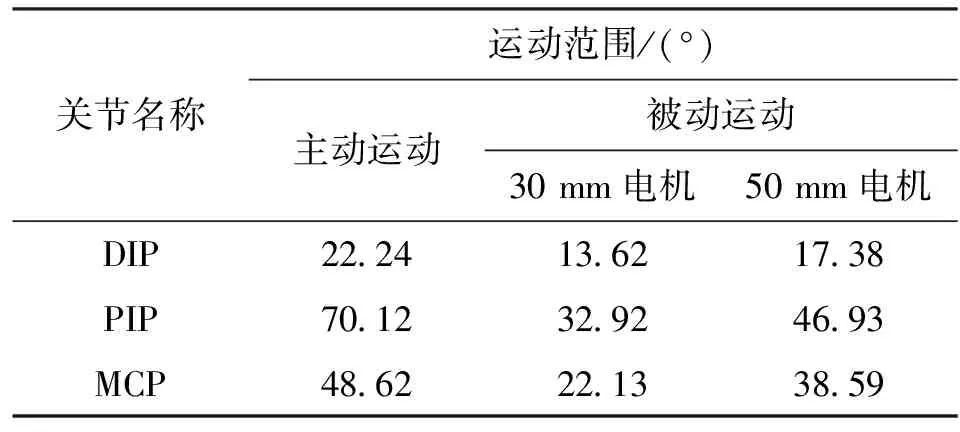
表2 实验测试关节运动范围

(a)30 mm电机驱动

(b)50 mm电机驱动
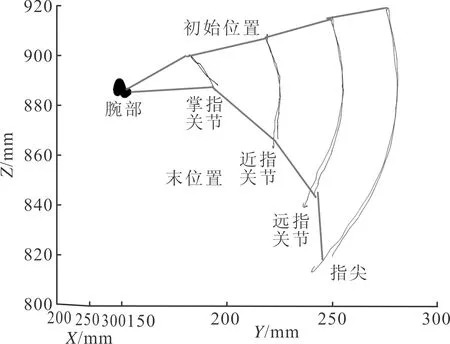
(c)主动运动图4 30 mm电机驱动、50 mm电机驱动及主动运动时手指关节运动轨迹
(a)近指关节

(b)掌指关节

(c)远指关节图5 不同手指关节的运动范围
虽然手指外骨骼原型机协助人手指实现的关节弯曲角度小于手指主动运动时的关节弯曲角度,但两者的运动过程及规律一致。康复训练必须在无痛的前提下进行,因此不必达到正常人手运动的全范围,所以可认为本文提出的原型机采用50 mm行程的电机足以用于辅助患者进行日常生活和手指功能恢复,30 mm行程产生运动范围辅助关节运动有些不足。

图6 测量指尖力的实验装置
2.2 输出指尖力测试
采用了手指TPS(Pressure Profile Systems,USA)系统测量手功能康复外骨骼在指尖处的输出力,该指尖力传感器厚度为2~3 mm,测量最大值为22.73 kg,分辨率为0.045 kg,采样频率为40 Hz。输出指尖力测试的实验装置如图6所示,指尖力测量结果如图7所示。图7结果表明,使用30 mm行程的电机所产生的最大指尖力为15.36 N,使用50 mm行程的电机所产生的最大指尖力为17.49 N。如前所述,在每根手指指尖施加约7.3 N的力,即可实现手指握拳,完成拾取小于1.5 kg的物体的动作。因此,可认为本文所提出的手功能康复外骨骼可以协助患者完成日常常用动作。

图7 指尖力测量结果
2.3 讨论
通过以上实验数据及分析可知,本文提出的多段连续结构的外骨骼手功能康复机基本实现了预期功能,能够协助患者进行一定角度范围内的CPM康复训练,并且可在指尖产生足够的指尖力来协助患者完成日常动作,可以改善手功能障碍患者康复训练效果。与文献[8]中具有3层滑动弹簧机构的手功能康复外骨骼设计相比,本文提出的设计复杂度较低,同时能够产生更大的指尖力。与文献[17]中提出的手功能康复外骨骼设计相比,本文的设计可以避免空气压缩机等增大整体尺寸,基本完成了研究目标,将来需要实际应用到手指功能障碍患者的康复训练中来进一步验证该外骨骼康复机的性能。
3 结 论
本文提出了一种新型的使用多段连续结构的手功能康复外骨骼机,帮助患者进行手指伸展和屈曲的辅助治疗和康复训练。该原型机质量轻,易于穿戴,适用于一定范围内不同尺寸的手,可实现定制化。实验结果表明,协助患者运动的关节角度和产生的指尖力均满足康复患者训练和日常生活所需,具有实际的应用可能。
在未来的研究中,我们将对所有手指开发外骨骼机并实验验证,对该驱动器进行运动学建模,进一步优化多段连续结构,实现人手指关节运动的仿生轨迹规划。将患者的运动意图与感觉运动的反馈相关联,促进中风患者的康复,因此后续还需将脑电信号作为未来研究手功能康复外骨骼控制的输入指令,加入脑电控制,更好地帮助患者进行神经康复治疗。
参考文献:
[1] HEO P,GU G M,LEE S J,et al. Current hand exoskeleton technologies for rehabilitation and assistive engineering [J]. International Journal of Precision Engineering & Manufacturing,2012,13(5): 807-824.
[2] TAKAHASHI C D,DERYEGHIAIAN L,LE V,et al. Robot-based hand motor therapy after stroke [J]. Brain: A Journal of Neurology,2008,131(2): 425-437.
[3] KAMPER D G,FISCHER H C,CRUZ E G,et al. Weakness is the primary contributor to finger impairment in chronic stroke [J]. Archives of Physical Medicine & Rehabilitation,2006,87(9): 1262-1269.
[4] 陈学斌,高海鹏,刘文勇,等. 手外骨骼康复技术研究进展 [J]. 中国医疗设备,2016,31(2): 86-91.
CHEN Xuebin,GAO Haipeng,LIU Wenyong,et al. Research on the development of hand exoskeleton as a rehabilitation technology [J]. China Medical Equipment,2016,31(2): 86-91.
[5] 郭晓辉,王晶,杨扬,等. 基于虚拟现实的下肢主被动康复训练系统研究 [J]. 西安交通大学学报,2016,50(2): 124-131.
GUO Xiaohui,WANG Jing,YANG Yang,et al. Active and passive training system of lower limb rehabilitation based on virtual reality [J]. Journal of Xi’an Jiaotong University,2016,50(2): 124-131.
[6] MERIANS A S,JACK D,BOIAN R,et al. Virtual reality-augmented rehabilitation for patients following stroke [J]. Physical Therapy,2002,82(9): 898-915.
[7] IQBAL J,KHAN H,TSAGARAKIS N G,et al. A novel exoskeleton robotic system for hand rehabilitation: conceptualization to prototyping [J]. Biocybernetics & Biomedical Engineering,2014,34(2): 79-89.
[8] ARATA J,OHMOTO K,GASSERT R,et al. A new hand exoskeleton device for rehabilitation using a three-layered sliding spring mechanism [C]//IEEE International Conference on Robotics and Automation. Piscataway,NJ,USA: IEEE,2013: 3902-3907.
[9] 胡鑫,张颖,李继才,等. 一种外骨骼式手功能康复训练器的研究 [J]. 生物医学工程学杂志,2016(1): 23-30.
HU Xin,ZHANG Yin,LI Jicai,et al. Study on an exoskeleton hand function training device [J]. Journal of Biomedical Engineering,2016(1): 23-30.
[10] POLYGERINOS P,WANG Z,GALLOWAY K C,et al. Soft robotic glove for combined assistance and at-home rehabilitation [J]. Robotics & Autonomous Systems,2015,73(C): 135-143.
[11] TONG K Y,HO S K,PANG P M K,et al. An intention driven hand functions task training robotic system [C]//2010 Annual International Conference of the IEEE Engineering in Medicine & Biology Society. Piscataway,NJ,USA: IEEE,2010: 3406-3409.
[12] CUI L,PHAN A,ALLISON G. Design and fabrication of a three dimensional printable non-assembly articulated hand exoskeleton for rehabilitation [C]//Proceedings of the Annual International Conference of the IEEE Engineering in Medicine & Biology Society. Piscataway,NJ,USA: IEEE,2015: 4627-4630.
[13] HO N S,TONG K Y,HU X L,et al. An EMG-driven exoskeleton hand robotic training device on chronic stroke subjects: task training system for stroke rehabilitation [C]//IEEE International Conference on Rehabilitation Robotics. Piscataway,NJ,USA: IEEE,2011: 5975340.
[14] RUS D,TOLLEY M T. Design,fabrication and control of soft robots [J]. Nature,2015,521(7553): 467-475.
[15] HONG K Y,LIM J H,NASRALLAH F,et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness [C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway,NJ,USA: IEEE,2015: 4967-4972.
[16] IN H,KANG B B,SIN M K,et al. Exo-glove: a
wearable robot for the hand with a soft tendon routing system [J]. IEEE Robotics & Automation Magazine,2015,22(1): 97-105.
[17] BORBONI A,MOR M,FAGLIA R. Gloreha-hand robotic rehabilitation: design,mechanical model and experiments [J]. Journal of Dynamic Systems Measurement & Control,2016,138(11): 111003.
[18] HU X L,TONG K Y,SONG R,et al. A comparison between electromyography-driven robot and passive motion device on wrist rehabilitation for chronic stroke [J]. Neurorehabilitation & Neural Repair,2009,23(8): 837-846.
[19] POLYGERINOS P,GALLOWAY K C,SAVAGE E,et al. Soft robotic glove for hand rehabilitation and task specific training [C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway,NJ,USA: IEEE,2015: 2913-2919.
[20] SMABY N,JOHANSON M E,BAKER B,et al. Identification of key pinch forces required to complete functional tasks [J]. Journal of Rehabilitation Research & Development,2004,41(2): 215-224.
