典型跟驰模型的特征与性能分析*
2018-06-20闫冬梅郭建华
陈 征 闫冬梅 刘 钊 郭建华
(1.南京理工大学自动化学院 南京 210094; 2.东南大学智能运输系统研究中心 南京 210018)
车辆跟驰(Car Following,CF)模型主要研究前车行驶过程中状态改变所引起的后车相应的变化行为,通过车辆逐一跟驰的方式描述单一车道上的交通流特性,建立驾驶员微观行为与交通流宏观现象之间的联系。在过去60多年的发展过程中,学者们相继提出了许多不同形式的跟驰模型,取得了丰富的研究成果[1]。车辆跟驰模型在微观交通仿真、交通安全评价和通行能力分析等领域得到了广泛应用。因此,对跟驰模型进行充分研究,从而揭示交通流运行的内在机理,完善微观仿真系统,提高交通仿真的现实性,具有重要的理论价值和现实意义。本文首先阐述跟驰模型的发展背景,然后分析典型模型GM模型、Gipps模型和全速度差模型的基本形式、假设条件和基本特性。最后,通过实例研究,对比分析不同跟驰模型下车辆跟驰过程中的位置、速度和加速度等参数的变化,分析车辆行驶状态的变化。
1 跟驰模型的发展背景
跟驰模型的研究始于20世纪50年代。1953年,Pipes[2]提出车辆跟驰模型,但该模型忽视了车头间距对跟驰行为的作用。这时期的车辆跟驰理论适用于无超车的单车道密集交通状态。Chandler等[3]给出GM(general motors,GM)模型的原始模型,通过对实验结果的分析,发现加速度与车头时距不显著相关,而与相对速度显著相关。Gazis等[4]给出GM模型的常规表达式,并通过调整模型参数取值,得到不同的流量-密度关系表达式。
1959年,Kometani等[5]提出安全距离跟驰模型,该模型在前车与后车速度的基础上计算安全的跟驰距离。Gipps[6]考虑了车辆的安全距离和加速度约束,提出一个新的安全距离模型,该模型假设跟随车能在引导车突然制动后安全停下来。之后,Helbing和Tilch[7]提出类似于分子动力学的广义力(general force,GF)模型,该模型克服了Bando等[8]提出的优化速度模型(optimal velocity model,OVM)中的加速度过高、未考虑驾驶员反应延迟时间与车辆停止处易发生碰撞等问题,但当前车的速度与后车相比足够快时,虽然前后两车间的距离比安全间距小,后车驾驶员仍不会减速,GF模型不能对该现象进行解释。因此,何民等[9]建立考虑相对速度的车辆跟驰模型,并分析该模型的稳定性。在此之后,相关学者提出了考虑前后车辆间的速度差为正负时对车辆加速度影响的全速度差(full velocity difference,FVD)模型[10-12]。
随着元胞自动机(cellular automata,CA)理论的发展,Cremer等[13]将元胞自动机理论引入交通流模型构建中。Wolfram[14]基于元胞自动机理论,提出非常简单的184号模型。184号模型将路段分为等长度的格点,每个格点视为1个元胞,最多能容纳1辆车,若某一时刻格点无车,其左侧格点有车,则在下一时刻,左侧格点的车辆向前行驶占据该格点;若某一时刻格点有车,其右侧格点也有车,则该格点的车辆就会因为没有行驶空间而停止不动。在184号模型研究基础上,Nagel等[15]考虑最大速度和随机慢化率2个重要参数,建立著名的Nasch模型,首次将基于个体行为学习的CA模型应用于交通仿真过程。元胞自动机模型将交通流理论引领到新领域,拓展了车辆跟驰行为建模的研究范围。
2 典型跟驰模型
2.1 刺激-反应模型
Gazis等认为车辆跟驰理论的中心思想是每个驾驶员对特定的刺激做出反应,并将其总结为关系式:反应=灵敏度×刺激,其中刺激可以是车辆位置和它们对时间的导数的函数,也可以是其他参数,反应取为车辆的加速度。GM模型是典型的刺激-反应模型,基本表达式为:
(1)

GM模型是大多数跟驰模型研究的基础,该模型结构简单,物理意义明确,清楚地反映出车辆跟驰行驶的制约性、延迟性和传递性。GM模型虽然属于微观模型,但它建立了微观驾驶行为与宏观交通流之间的联系。另外,GM模型也具有局限性,实际运行中跟驰行为受交通和流量等条件的影响,而模型中只考虑了前车刺激对后车反应的作用;模型依据的试验数据都是在低速条件下获取的,不能反映普遍的跟驰行为;跟随车对正负相对速度的反应程度相同,而实际观测表明相对速度正负不同时,跟随车的反应是不一致的。
2.2 安全距离模型
为了分析道路网络条件变化对交通流的影响,提出了安全距离类模型。Gipps模型属于安全距离类模型(collision avoidance model,CAM),即寻找一个特定的跟驰距离,当前车行为改变,前后车之间的距离小于该特定跟驰距离时,就有可能发生碰撞。Gipps[6]假设跟随车能在引导车突然制动后安全地停下来,考虑驾驶员和车辆的速度、加速度、位置限制:
(0.025+vn)(t)/Vn1/2
(2)
(3)

Gipps模型降低了模型参数标定时参数范围选择的难度,提高了模型参数标定的精度。此外,Gipps模型考虑了反应时间,避免仿真过程中反应时间与仿真不一致而引起的各种问题。然而,在车辆行驶过程中,Gipps模型要求所有车辆必须恰好行驶在当前车辆行驶状态决定的安全距离上,这与现实中车辆的行驶情况不符。
2.3 优化速度模型
考虑到行驶的车辆都有不同的行驶速度,而该速度又取决于与前车之间的距离,Bando等提出了优化速度(optimal velocity model,OVM)模型,该类模型能展现宏观交通流中时走时停、突发的交通阻塞和激波等现象。考虑前车车速大于后车车速的情况,提出了全速度差(full velocity difference model,FVD)模型,则:
(4)
式中:κ为灵敏度常数;λ为Δv的权系数随模型应用条件变化;V(s)为优化速度函数。
FVD模型同时考虑了速度差为正负时对跟驰车的影响,更符合实际的交通阻塞密度与车辆延误时间。FVD模型在车辆行驶过程中不会产生过高的加速度,此外,它能描述交通流的相变和交通拥堵的形成等实际的交通现象。但当前后车的速度相等或差别很小且车头时距也很小时,假设由于突发事故或交叉口红灯使前车突然制动,并产生较大制动加速度,在FVD模型中易发生前后车碰撞的情况。
3 实例分析
以GM模型、Gipps模型和FVD模型为实例,计算车辆跟驰中行驶状态的变化。在计算过程中,仅考虑由2辆车组成队列中的跟驰状态,并且假设车辆都以匀加速或匀减速状态行驶。
3.1 模型建立
对GM模型,主要根据Edie[16]的研究结果,选择假设条件中参数m和l的取值。对Gipps模型,主要是依据Gipps的研究成果。对FVD模型,选择了常用的优化速度函数。同时,由于GM模型、Gipps模型和FVD模型是根据不同的车辆跟驰原理而建立起来的,因此模型仿真的基本初始参数的选择也不尽相同。这3个模型的具体假设条件和初始参数的设置见表1。
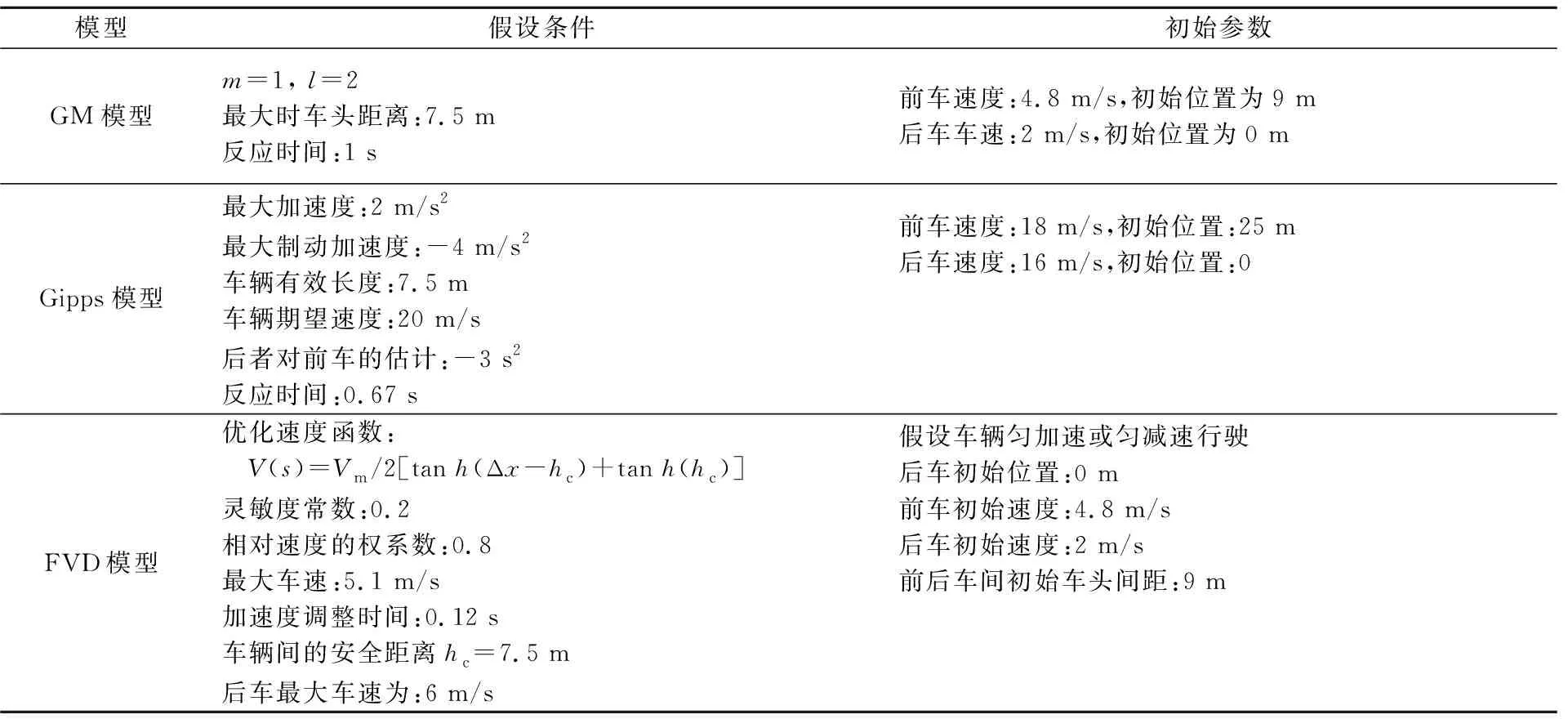
表1 模型主要假设条件及初始参数信息
3.2 结果比较
根据设置的模型假设条件和初始参数值,GM模型、Gippes模型和FVD模型的数值仿真结果见图1~3,包括车辆的速度变化和位置变化情况。
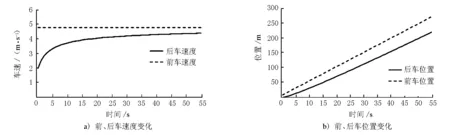
图1 GM模型计算结果
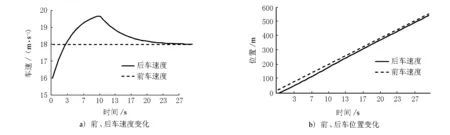
图2 Gipps模型计算结果

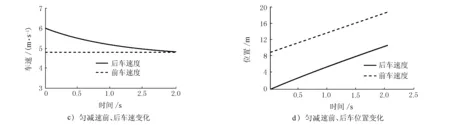
图3 FVD模型计算结果
由图1a)可见,GM模型的前后车速度变化情况为:当前后车速度差较大时,后车的加速度较大;当后车速度逐渐接近于前车速度时,后车的加速度逐渐减小为零,前车和后车的速度差保持稳定。在图1b)中,前后车跟驰过程中车间距离逐渐增大。由图2a)可见,在Gipps模型中,后车的速度迅速增加,在超过前车速度之后逐渐减少,最终与前车速度相同。这是由于在Gipps模型中,后车的速度在满足期望速度限制后受限于安全距离,因此后车的速度减少,并趋于稳定。此外,由图2b)可见,Gipps模型中,前后车之间的距离逐渐减小,逐渐接近车辆的有效长度。对于FVD模型而言,分为匀加速和匀减速2种情况。其中,图3a)和b)为匀加速情况,图3c)和d)为匀减速情况。由图3a)和b)可见,当后车的速度小于前车的速度时,后车的速度逐渐增加,并与前车速度一致,同时前后车之间的车距基本保持不变,这是因为后车根据前后车相对位置及最优速度改变其速度。而在图3c)和d)中,当前车的速度小于后车的速度时,后车的速度逐渐减小,与前车车速一致,同时前后车之间的车距基本保持不变。
总的来说,由图1~3可见,在保证前后车正常行驶的条件下,GM模型、Gipps模型和FVD模型展现出了不同的特性。GM模型是较早提出的微观跟驰模型,仅考虑驾驶员的刺激反应,其模型建模简单,只能反应理想条件下单一因素下车辆跟驰情况。在此基础之上,考虑车辆之间的距离因素,发展出了Gipps模型,该模型较能体现车辆跟驰过程中速度控制的影响。而FVD模型的发展更符合实际情况,能够较为准确地描述单一车辆加速或减速的行驶特性。
4 结语
本文通过具有代表性的跟驰模型,GM模型、Gipps模型和FVD模型,对比分析了刺激-反应类模型、安全距离类模型和优化速度类模型的特性。以具体的数值仿真为例,对比分析GM模型、Gipps模型和FVD模型中车辆速度和车辆位置变化的特点。结果表明,GM模型考虑的跟驰影响因素较为单一,只能适用于理想条件下的跟驰过程,Gipps模型能够较好地体现出行驶速度因素在跟驰过程中的影响,而相较于前2种模型,FVD模型则能够更好地适用于实际跟驰情况。
[1] 孙俊,商蕾,高孝洪.交通仿真模型及其应用研究[J].交通科技,2004(4):102-104.
[2] PIPES L A.An operational analysis of traffic dynamics[J].Journal of Applied Physics,1953,24(3):274-281.
[3] CHANDLER R E,HERMAN R,MONTROLL E W.Traffic dynamics: studies in car following[J].Operations Research,1958(2):165-184.
[4] GAZIS D C,HERMAN R,ROTHERY R W.N-onlinear follow-the-leader models of traffic flow[J].Operations Research,1961(4):545-567.
[5] KOMETANI E,SASAKI T.Dynamic behavior of traffic with a nonlinear spacing-speed relationship[C]// Elsevier. Proceeding of the Symposium on theory of Traffic Flow.New York:Elsevier,1959:105-119.
[6] GIPPS P G.A behavioural car-following model for computer simulation[J].Transportation Research Part B: Methodological,1981,15(2):105-111.
[7] HELBING D,TILCH B.Generalized force model of traffic dynamics[J].Physical Review E,1998,58(1):133.
[8] BANDO M,HASEBE K,NAKAYAMA A, SUGIYAMA Y.Dynamical model of traffic congestion and numerical simulation[J].Physical Review E,1995,51(2):1035-1042.
[9] 何民,荣建,任福田.判定跟驰状态的研究[J].公路交通科技,2001,18(4):74-78.
[10] 姜锐,吴清松.交通流复杂动态特性的微观和宏观模式研究[J].中国科学院研究生院学报,2006(6):848-854.
[11] 支梁,史忠科,刘通.一种交叉路口全速度差改进模型[J].交通运输系统工程与信息,2013,13(6):80-85.
[12] 王建都, 张俊乐.一种改进全速度差模型的稳定性分析与仿真[J].计算机工程与应用,2016,52(7):24-27.
[13] CREMER M,LUDWIG J.A fast simulation model for traffic flow on the basis of boolean operations[J].Mathematics & Computers in Simulation,1986,28(4):297-303.
[14] Wolfram S.A new kind of science[M].Champaign: Wolfram Media,2002.
[15] NAGEL K,SCHRECKENBERG M.A cellular automaton model for freeway traffic[J].Journal de physique I,1992,(12):2221-2229.
[16] EDIE L C.Car-following and steady-state theory for noncongested traffic[J].Operations Research,1961,9(1):66-76.