基于模糊神经网络的储运发箱吊装PID控制
2018-06-13曾令梦侯远龙蒋梦琴
曾令梦,高 强,侯远龙,蒋梦琴,黄 京
(南京理工大学机械工程学院,南京 210094)
0 引言
当前,火箭炮普遍情况下使用箱式发射,能有效提高发射的火力密度。而储运发箱的吊装作业主要通过人力完成,存在效率较低、人员的工作环境差的现象[1]。采用储运发箱的自动吊装技术,可减少移动储运发箱的时间,提高定位的精度。同时,储运发箱的自动吊装技术可以减短发射的预备周期,提高火箭炮的应急能力。但该自动吊装系统具有非线性,且吊装过程中容易受到扰动,传统PID难以达到要求[2-3]。
模糊控制是以模糊逻辑推理为基础的控制方法[4],具有较强的鲁棒性,但模糊规则的调节主要依靠经验,不够准确。神经网络具有较强的自学习功能,能够逼近任何一个复杂的非线性系统,还能学习和适应不确定系统的动态特性[5]。将这两者结合用于吊装系统定位的PID控制,可以发挥两种控制的优点,是解决该非线性系统的一种有效方法。
本文结合模糊控制和神经网络来实现自动吊装系统的PID控制,使系统在保持经典PID控制器优势的同时,也能继承模糊神经网络的自学习和自适应能力。采用模糊神经网络整定的PID控制器,可以改善系统的可靠性,提高吊装精度,缩短吊装时间。
1 储运发箱自动吊装系统
1.1 自动吊装的原理
1)选择正北为参考基准线。惯导安装在发射架上,可获取发射架的北向角以及发射架对大地的纵、横倾值。
2)装填车和发射车上安装激光测距仪,测量出发射车上的两个已知基准点到装填车上的两个已知基准点的距离值,由距离值计算出装填车与发射车的相对夹角θ,如图1所示。
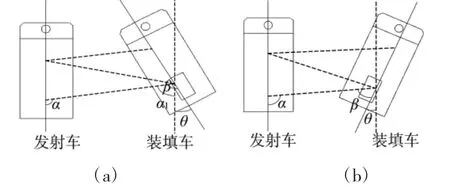
图1 装填车与发射车的相对夹角
3)根据装填车与发射车的相对夹角,再结合发射架的北向角,计算出将储运发箱调转到发射架上方时,装填车吊臂相对于装填车的高低角和方向角。
4)利用控制算法将吊臂调转至目标位置,以完成自动吊装。
1.2 电液伺服系统的组成
该吊装系统的结构主要由方位角伺服系统和高低角伺服系统组成,即回转机构和变幅机构。回转机构通过液压马达来控制吊臂方位角的变化。变幅机构控制吊臂高低角的变化,由吊臂架腹部的液压缸实现,用于改变吊臂架俯仰,实现高低角的控制[6]。电子伺服系统原理图如图2所示。
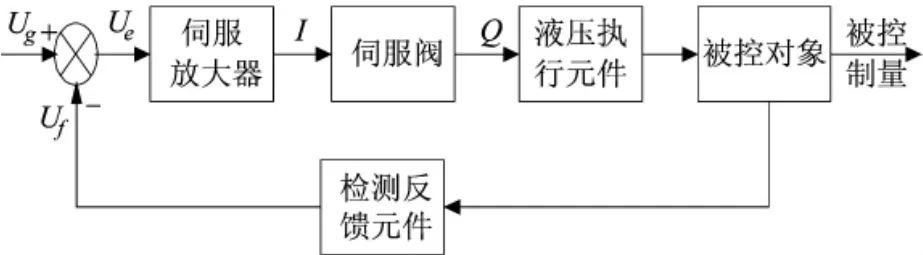
图2 电液伺服系统原理图
1.3 传递函数的推导
由于方位角和高低角伺服系统的控制原理相同,此处以高低角作为例子进行建模和仿真。
1.3.1 伺服放大器
由于其固有频率高,可将放大器看作比例环节。

式中,I(s)为输出电流,U(s)为误差电压,Ka为放大器的增益。
1.3.2 电液伺服阀
电液伺服阀作为关键部件,通过将电流控制信号转换为伺服阀阀芯的运动,产生节流口,从而输出流量与液压力,控制液压执行元件的速度、方向以及带负载的动力[7],从而达到连接液压元件和电气元件的作用。电液伺服阀的优劣指标将直接影响系统的响应速率和控制精度,从而影响可靠性。
电液伺服阀的传递函数如下:

由于在很多的电液系统中,液压缸的动态响应比伺服阀更低。为了让系统分析起来更简便,则简化了电液伺服阀的二阶传递函数:

式中,ωsv为伺服阀的固有频率,ξsv为阻尼比。
1.3.3 阀控液压缸
在不忽略各种影响因素的前提下,传递函数为:

K为液压缸的增益:

式中,Ap为液压缸的横截面积。
1.3.4 位移传感器
位移传感器的响应速度比电液伺服阀高很多,所以位移传感器可以当作比例环节。

式中,Y为传感器测量的实际位移,Xp为液压缸的位移。
1.3.5 高低角伺服系统传递函数
控制系统方块图如图3所示。

图3 吊装高低角控制的系统框图
则系统的开环传递函数为:

2 基于模糊神经网络的PID控制器
2.1 模糊神经网络PID控制器结构
由模糊神经网络参数调整器和PID控制器组成。该控制器是把误差、误差变化率和误差累积量作为输入,通过参数的自学习能力来调整模糊规则,以得到能够达到期望控制效果的PID控制器参数[8]。该控制方法精度高,不会出现超调量大、易振荡的现象。控制器的结构框图如图4所示:
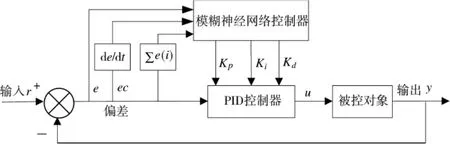
图4 控制器结构图
该控制系统主要由两部分组成:
1)PID控制器:该控制器直接控制被控对象。
2)模糊神经网络参数调整器:利用神经网络的自学习调节网络权系数,从而使得输出将会适用于某特定的控制函数中的PID控制器参数Kp、Ki、Kd。
本文采用传统增量式PID控制,PID算法如下:
式中:u(k)为控制器的输出,r(k)为理想输出,y(k)为实际输出,e(k)为两者的偏差信号。
2.2 模糊神经网络结构
本文设计的神经网络有4层,包括输入层、模糊层、模糊推理层和输出层,其结构如图5所示:

图5 模糊神经网络结构
1)第1层为输入层,该层中每个神经元代表一个输入量,并将输入值传递到下一层。神经网络将系统误差e、误差变化率ec和误差累积量作为输入量。激活函数为:

该层的输入为:。

2)第2层为模糊层。该层有7个神经元,分别将3个输入划分到7个模糊集,进行模糊化。这7个节点分别表示模糊集中的 {NL,NM,NS,Z,PS,PM,PL}[9];分别表示负大、负中、负小、零、正小、正中、正大。根据系统的特点,使用高斯函数作为激活函数,以此来计算模糊集中各输入变量的隶属度。该层的激活函数如下:

其中,i=1,2,3;j=1,2,3,4,5,6,7。mij是高斯函数中的第i个输入量的第j个模糊集隶属度函数的均差,σij为标准差。
3)第3层为模糊推理层。该层有7个神经元,各节点对应一个模糊规则,作用是通过把模糊化以后的输入量再进行两两相乘,可得到本层的输出值。因此,该层的激活函数输出为:

其中,。
4)第4层为输出层。该层的输出为PID控制器的3个参数Kp、Ki、Kd,与上一层连接有一个连接权矩阵ω。本层的输出为:
2.3 学习算法
由于电液伺服系统具有很强的非线性,需要即时对网络权系数进行整定,也就是调整模糊规则。取性能指标函数为:
其中,r(k)为理想输出,y(k)为实际输出。
按照梯度下降法调节神经网络权值,即按照E对权系数的负梯度方向搜索调整。同时,附加一个使搜索快速收敛的全局极小惯性项。△ωij(k)的学习算法为:

式中,η为学习速率,α为惯性系数。

由于未知,所以用近似的符号函数sign(),产生的误差可通过调节学习速率来补偿。
3 实验仿真
3.1 建立仿真模型
该电液伺服系统的位置环通过本文设计的伺服控制器完成。在simulink中搭建仿真模型如图6,其中,控制器和被控对象的部分写进s函数,用于描述复杂的动态系统[10]。

图6 simulink仿真模型
3.2 结果分析
为了比较3种控制器的性能:PID控制器、RBF神经网络控制器和模糊RBF神经网络的PID控制器,在Simulink进行了仿真实验,用plot函数绘出阶跃响应信号仿真曲线,进行对比。PID控制器参数为 Kp=4,Ki=2,Kd=1.6。
在阶跃输入下,该系统采用模糊神经网络PID控制器的位置响应与其他两种控制器的对比曲线如图7所示。仿真结果表明,该系统在模糊神经网络PID控制器的作用下,超调量和调整时间明显得到了改善。
另外,在t=6 s时给系统一个扰动,在各控制器的作用下,阶跃响应曲线如图8所示。对比发现,当采用模糊RBF神经网络PID控制器时,受到负载干扰的影响较小,具有更好的性能。
4 结论
针对储运发箱自动吊装系统中存在的非线性,为克服PID控制器难以实现理想控制的缺点,设计了一种基于神经网络的模糊PID控制器。将模糊控制、神经网络与PID控制相结合,利用神经网络的自学习能力,实时调整网络的权值,即调整模糊规则,从而得到一组适用于自动吊装系统的Kp、Ki、Kd参数。该控制器能有效改善传统PID控制中参数的自适应能力差和鲁棒性差的缺陷,实现储运发箱自动吊装控制的自适应能力。仿真结果表明,采用RBF神经网络对模糊控制的规则进行优化,整定PID控制参数,可以提高该伺服系统的控制精度和抗干扰能力,体现出传统单一的方法不具备的优势。
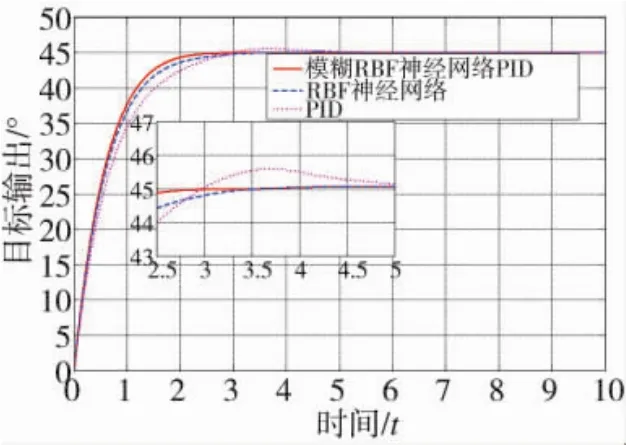
图7 目标输出角度为45°时的阶跃响应曲线
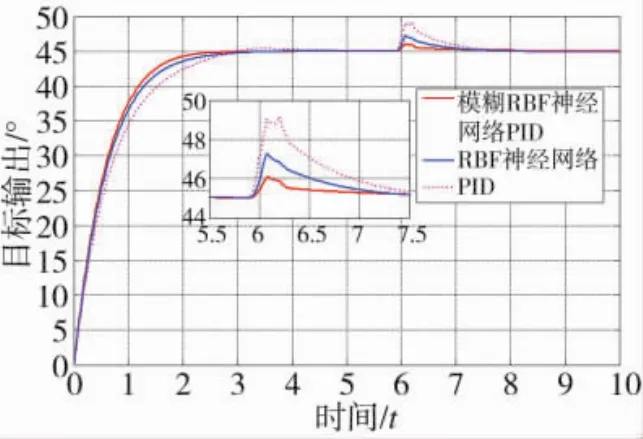
图8 发生扰动时的阶跃响应曲线
[1]何晓晖,王强,曾繁琦,等.基于无人化技术的军用工程机械吊装作业研究[J].装备制造技术,2016,44(1):195-198.
[2]朱玉川,李志刚,马大为,等.某箱式多管火箭炮自动装填装置设计[J].弹箭与制导学报,2006,26(1):97-99.
[3]鲁霄光,李军,张震,等.某储运发射箱满载吊装响应分析[J].火炮发射与控制学报,2014,36(1):53-57.
[4]CHEN S Y,Hung Y H,Gong S S.Speed control of vane-type air motor servo system using proportional-integral-derivative-based fuzzy neural network[J].International Journal of Fuzzy Systems,2016,18(6):1065-1079.
[5]王天辉,李阳,王峰.基于模糊神经网络的伺服系统PID控制[J].火力与指挥控制,2014,39(4):153-156.
[6]胡永攀,陈循,陶利民,等.主动式波浪补偿起重机液压伺服系统数学建模与优化[J].机床与液压,2010,38(9):80-84.
[7]李拓彬.电液伺服系统神经网络控制策略研究与应用[D].长沙:中南大学,2013.
[8]张金龙,徐慧,刘京南,等.基于模糊神经网络的精密角度定位 PID 控制[J].仪器仪表学报,2012,33(3):549-554.
[9] WU Y M,CUI G Z,ZHANG X C.Fuzzy RBF neural PID control to simulation turntable servo system [J].Communications in Computer and Information Science,2014,472(2014):478-482.
[10]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2016.