声纳主动工况下拦截弹作战模型与能力研究
2018-06-13李文哲
任 磊,贾 跃,李文哲
(海军大连舰艇学院,辽宁 大连 116018)
0 引言
悬浮式拦截弹是水面舰艇防御来袭鱼雷的一型硬杀伤武器。由于硬杀伤相比软对抗作用范围有限,所以为了提高其作战能力,需进一步提高对目标鱼雷的定位精度[1]。这就需要依靠专用的鱼雷报警声纳对来袭鱼雷进行检测和定位。鱼雷报警声纳具有主、被动两种工况,其中被动工况下悬浮式拦截弹的作战模型已有较为深入的研究[2-3],但对于声纳主动工况下其作战模型的研究在国内公开发表的文献中还未见到。相比之下,鱼雷报警声纳在主动工况时的探测距离较近,但其能够测量目标鱼雷的方位和距离,这就为火控设备解算目标鱼雷的航向航速提供了条件。但是,鱼雷报警声纳主动工况所具备的特点也给悬浮式拦截弹的布阵带来了3个方面的问题:一是武器布放时机的确定问题。这里的武器布放时机主要考虑目标航向航速的解算时间,其中也包括了探测获取解算需要的目标位置点的时间。解算时间越长,解算精度越高;但是由于鱼雷报警声纳主动工况的探测距离较近,如果解算时间过长,目标与舰艇距离将更近,这就可能导致武器受到最小射程的限制而无法布放;二是拦截提前量的确定问题。为了确保对来袭鱼雷的有效拦截,悬浮式拦截弹入水时应位于鱼雷航路前方且与鱼雷相距足够的距离,即保证足够的拦截提前量[4]。但是,同样由于武器最小射程的限制使得拦截提前量也不能过大;三是武器布放间隔的优化问题。由于能够测量目标的距离,对目标的定位精度较高。这种情况下布放一定数量的悬浮式拦截弹已能覆盖来袭鱼雷的可能航向范围,这就需要确定适当的布放间隔,尽量避免由于落点误差使来袭鱼雷从相邻武器的间隙中突破。因此,武器的布放间隔需要进行优化。然而,布放时机、拦截提前量和布放间隔三者之间又存在相互联系,一般的解析方法难以解决以上问题。因此,这里通过建模和仿真,对鱼雷报警声纳主动工况下悬浮式拦截弹的作战能力问题展开研究。
1 武器作战模型
1.1 作战过程概述

图1 作战过程示意图
由于鱼雷报警声纳一般先由被动工况在较远距离检测到目标,然后再在其主动工况下对目标实施精确定位[5]。所以认为声纳可在主动工况的最远作用范围探测到目标,此时来袭鱼雷一般还未发现水面舰艇,仍处于直航搜索阶段。
如图1所示,假设水面舰艇于W0点通过鱼雷报警声纳主动工况发现目标鱼雷位于T0点,目标方位和距离分别为B0、D0。声纳按照一定的时间周期将目标的观测位置送给火控设备,火控设备通过滤波开始解算目标的航向CT和航速VT。当解算时间到达一定值t解算时,火控设备根据目标的航向航速解算得到武器的射击诸元,此时目标鱼雷航行至T1点,舰艇航行至W1点并发射悬浮式拦截弹。假设武器的最大射程为Smax,最小射程为Smin,发射数量为N。经过飞行时间tf后入水,其入水位置以目标鱼雷航向线上的P点为中心,按照一定方向和间隔对称分布。此时目标鱼雷航行至T2点。当悬浮式拦截弹检测到鱼雷经过时迅速引爆并毁伤鱼雷。这里将P点叫做武器的布放基准点。P点与武器入水时刻目标位置点T2之间的距离即“拦截提前量”,用Dtq表示。
1.2 目标运动参数解算模型
目标运动参数通常可采用最小二乘法滤波进行计算,具体步骤如下:1.2.1 计算中间变量a、b
其中,xi,yi为鱼雷报警声纳主动工况探测到的目标位置点的横、纵坐标。
1.2.2 计算目标航向
根据目标观测位置的纵坐标随时间增大或减小,判断目标航向按照式(2)或式(3)解算。

1.2.3 计算中间变量Tx、Ty
1.2.4 计算目标航速
将解算时间内鱼雷报警声纳探测的第一个和最后一个目标位置点的横、纵坐标分别x、y作为代入到式(4),分别得到 Tx',Ty'和 Tx',Ty'',则目标的航速可由式(5)得到[6]。
1.3 布阵参数解算模型
1.3.1 布放基准点
如图2所示,以武器发射时刻的舰艇位置W1为坐标原点,以舰艇航向CW为X轴正向建立直角坐标系。根据作战过程所述,鱼雷位于T1,其方位和距离分别为B1和D1,目标舷角为Qm1,射击提前角为φ。经过飞行时间tf后,鱼雷以航向CT、航速VT航行至T2,武器则以P点为基准布放入水。在△W1PT1中,可建立如式(6)所示的方程组。

其中,tf=f(DP)是根据武器射表拟合的飞行时间与射程之间的关系。由于式(6)是隐式方程组,需用迭代方法求解[7]。
计算出基准点P的距离DP和射击提前角φ后即可根据式(7)确定基准点P。

1.3.2 布放间隔
武器布放间隔Djg由其毁伤半径d毁伤,鱼雷航向CT,基准点P的方位BP及间隔系数k决定,如式(8)所示。

1.3.3 布放位置
确定基准点P和布放间隔Djg后,各枚武器以点P为中心,沿着P点方位BP的法线方向布放,具体位置可由式(9)计算得到。

其中,i=1,2,…,N。
2 作战能力仿真与分析
2.1 作战仿真模型
2.1.1 鱼雷运动观测模型
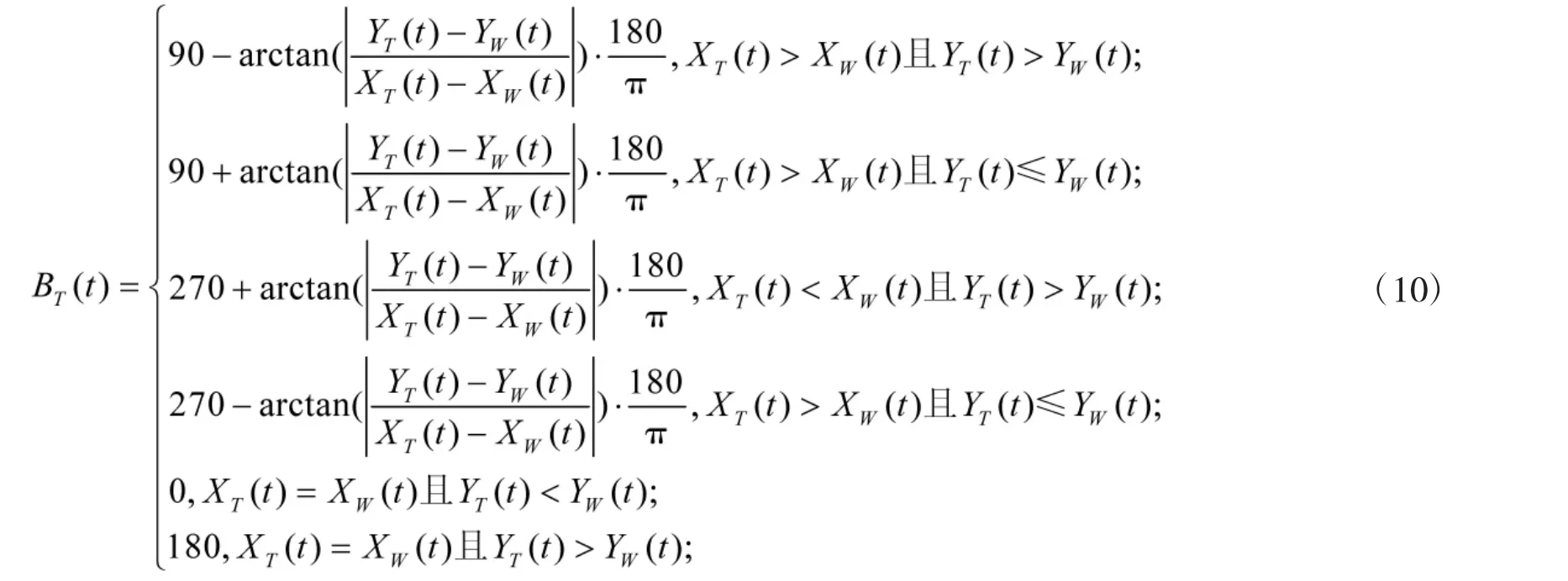
由于不考虑舰艇规避机动且鱼雷处于直航搜索阶段,两者均作匀速直线运动,故任意时刻t鱼雷相对舰艇的真实方位和距离可按式(10)[8]和式(11)计算。

假设鱼雷报警声纳主动工况探测和处理各个目标位置点的周期为t送数,则舰艇观测的鱼雷位置点的坐标由式(12)计算。
其中,n为声纳探测的目标位置点数;△qm和△dm分别为测向和测距的偏差量。
2.1.2 武器布放位置仿真模型
各枚武器的实际入水点的方位和落点距离由式(13)计算。

式中,△dHP(i)、dZP(i)分别为武器横向和纵向的散布误差。武器的布放位置由式(14)计算。

2.1.3 鱼雷拦截成功判断模型
任意t时刻各枚武器与鱼雷的距离由式(15)计算[9]。

当存在di(t)<d毁伤即可判断拦截成功。
2.1.4 拦截概率计算模型
仿真次数为5000次,假设其中拦截成功的次数为n成功,则拦截概率p拦截由式(16)计算得到。

2.2 仿真条件
鱼雷报警声纳对目标方位、距离的测量误差均方差分别为σB,σD。火控设备对目标方位、距离的解算误差均方差分别为 σB',σD'。
舰艇航速为20kn。目标鱼雷类型为线导+声自导鱼雷,初始距离为3000 m,航速为50kn。武器落点纵、横向误差均方差 σZ、σH均为其射程的 1/130[10-11]。
2.3 仿真结果及分析
2.3.1 目标位置解算误差
表1~表3分别为不同目标初始舷角Qm0和不同解算时间的目标位置解算精度。

表1 解算时间为10 s时的目标位置解算精度

表2 解算时间为25 s时的目标位置解算精度

表3 解算时间为40 s时的目标位置解算精度
2.3.2 目标运动参数解算精度
表4为不同解算时间的目标航向航速解算精度。

表4 目标运动参数解算精度
2.3.2 拦截概率计算
由表1和表4可知,解算时间为10 s时的目标位置和运动参数解算误差很大,所以这里只考虑解算时间为25 s、40 s的情况,并将目标初始距离的声纳测距误差和武器落点误差的综合误差σ的不同倍数作为拦截提前量的取值。
1)解算时间为25 s时的拦截概率

图3 解算时间为25 s时的拦截概率
2)解算时间为40 s时的拦截概率

图4 解算时间为40 s的拦截概率
2.3.3 仿真结果分析
从图3、图4可以看到:
1)目标运动参数解算时间从25 s增加到40 s,其拦截概率增加了15%~20%。
2)拦截提前量从1σ增加到3σ,解算时间为25 s时其拦截概率增加了18%~20%;解算时间为40 s,其拦截概率增加幅度较小,在目标初始舷角小于50°时,其拦截概率还有所减小。
3)间隔系数从0.2增加到1.0,其拦截概率先增大后减小。当解算时间为25 s时,若目标初始舷角小于150°,间隔系数最优取0.6,否则取0.8;当解算时间为40 s时,若目标初始舷角小于150°,间隔系数最优取0.4,否则取0.6。
综上所述,若声纳能够在3000 m左右的距离检测并跟踪目标鱼雷,则目标运动参数解算时间为40 s最佳。此时,针对舷角大于50°的目标,拦截提前量取3σ,布放间隔系数取0.4;否则拦截提前量取为2σ,布放间隔系数取0.6。
3 结论
鱼雷报警声纳主动工况下悬浮式拦截弹的作战模型及能力仿真研究建立了目标运动参数和武器射击参数的解算模型,并采用蒙特卡洛法仿真计算了其作战能力。结果表明以上模型正确可行,解决了布阵参数的确定问题,为指挥决策提供了理论依据。由于仿真中包括舰艇航速在内的其他因素对仿真结果亦存在影响,但主要考虑了布阵参数和目标初始舷角,所得结论亦未对所有情况进行全面验证,这是下一步要研究的方向。
[1]张宝华,杜选民.水面舰艇鱼雷防御系统综述[J].船舶工程,2003,25(4):17-19.
[2]姚奉亮,贾跃,丁贝.悬浮式深弹拦截不确定型鱼雷作战模型研究[J].鱼雷技术,2011,19(1):63-67.
[3]胡伟文,赵峰,姜礼平,等.悬浮式深弹拦截鱼雷作战仿真及效能分析[J].海军工程大学学报,2013,25(4):6-10.
[4]徐梁,谢国新,赵志军.悬浮式深弹拦截鱼雷方法研究[J].水雷战与舰船防护,2010,18(4):46-49.
[5]肖昌美,李恒,彭佩.国外水面舰艇鱼雷防御系统发展现状及趋势[J].鱼雷技术,2014,22(2):150-156.
[6]李启华,吉海鹏.最小二乘法在测定目标运动要素中的应用研究[J]. 广州航海高等专科学校学报,2008,16(1):5-7.
[7]杨福渠.火箭深弹射击效率[M].北京:国防工业出版社,1992.
[8]贾跃,姚奉亮,丁贝.火箭助飞式声干扰器和悬浮式深弹协同对抗线导鱼雷建模与仿真[J].鱼雷技术,2011,19(14):307-311.
[9]林贤杰,贾跃,赵学涛.舰艇使用悬浮式深弹对抗声自导鱼雷规避策略分析[J].鱼雷技术,2008,16(4):51-53.
[10]姚奉亮,贾跃,丁贝.悬浮式深弹拦截线导+声自导鱼雷作战模型研究 [J]. 指挥控制与仿真,2010,32(5):24-27.
[11]任磊,贾跃,李文哲.飞航式助飞鱼雷指令修正时机仿真[J].火力与指挥控制,2016,41(6):28-32.