直流电机调速系统的MATLAB仿真研究
2018-06-11雷金莉
雷金莉
(宝鸡文理学院电子电气工程学院,陕西宝鸡721016)
直流电动机具有调速范围广、运行特性平滑、控制简单等特点,广泛的应用于生产生活的电力拖动系统中[1-2]。在直流调速系统的应用当中,多采用双闭环直流调压调速控制系统,该系统成功发挥了生产机械在启动过程中转速负反馈和电流负反馈的调节作用,从而有效抑制了负载扰动和电网电压扰动的干扰,使电动机获得较好的启动性,有利于转速平滑上升,增强系统的稳定性[3-4]。
双闭环直流调压调速控制系统设计的核心部分是电流调节器与转速调节器参数的设定,其直接关系到调速系统的调速性能。调节器参数通常采用工程设计法来确定[5],采用工程设计方法设计调速系统控制参数时,为了使理论分析与设计变得更加简便,双闭环直流调压调速系统在建模过程中进行了很多近似处理,因此,由工程设计法得到的参数只能基本满足控制要求,而且所设计的调速系统的动、静态性能并非最佳。本文在工程法计算出双闭环调速系统控制参数的基础上,通过不同工况的仿真实验,优化调节器参数,以改变调速系统性能,提高双闭环调速系统的动、静态性能。
1 直流调速系统调节器参数确定
双闭环直流调速系统中设置了两个调节器ASR(转速调节器)和ACR(电流调节器),分别用来调节转速和电流,同时分别引入转速和电流负反馈,转速和电流调节器之间实行嵌套联接,即用转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器[6-7]。双闭环调速系统的结构框图如图1所示。
双闭环直流调速系统具有非线性、大滞后的特性,采用工程法确定调节器参数时,为了计算简单,通常将电流环等效为一阶惯性环节,其传递函数为:

将转速环等效为二阶惯性环节,其传递函数为:

经计算得到的调节器PI参数需再经过超调量检验,以确保其在超调范围之内,满足控制指标要求。
2 调速系统仿真
依据双闭环直流调速控制系统的动态结构图在仿真软件Matlab的SIMULINK工具箱中搭建直流调速系统仿真模型[8-11],如图2所示。其中转速环和电流环调节器均采用PI调节器。
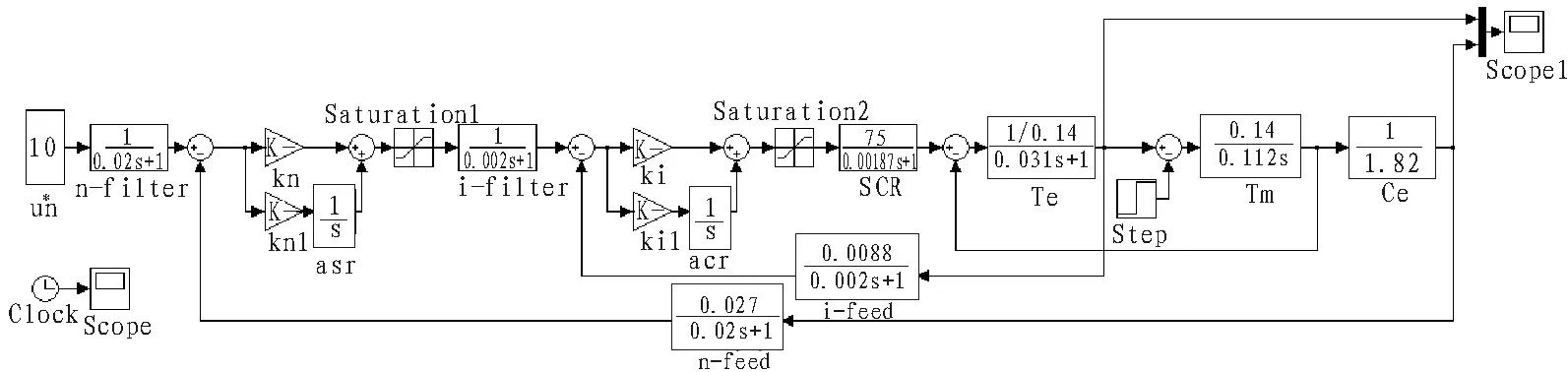
图2 双闭环直流调速控制系统仿真模型
3 调节器参数优化
本设计采用的仿真样机参数如下:主电路采用三相桥式整流电路。PN=500 kW,UN=750 V,IN=760 A,nN=375 r/min,电动势系数Ce=1.82 V∙min/r,电枢回路总电阻R=0.14 Ω,允许电流过载倍数λ=1.5,触发整流环节的放大倍数Ks=75,电磁时间常数Tl=0.031 s,机电时间常数Tm=0.112 s,电流反馈滤波时间常数Toi=0.002 s,转速反馈滤波时间常数Ton=0.02 s。设调节器输入输出电压Unm*=Uim*=Unm=10 V,调节器输入电阻R0=40 kΩ。
经工程设计法计算、校验后的调节器比例系数与积分系数为:
1)转速环比例系数Kp=10.4,积分系数Ki=1/0.013;
2)电流环比例系数Kp=0.896,积分系数Ki=1/0.035。
3.1 工程法确定的参数在不同工况下的仿真结果及分析
按照工程法确定的PI调节器参数设置仿真模型的参数,并模拟直流电机空载、满载和负载启动三种工况下的工作情况,仿真结果如图3所示。
从图3的仿真结果可以看出,直流电动机空载启动时,0.6 s左右稳定于给定转速375 r/min,转速超调量σ%=0,电流于0.8 s左右趋于稳定。直流电动机满载运行时,转速于1.4 s左右到达给定值375 r/min,转速超调量σ%=0,电流在1.5s左右稳定于760 A。电动机空载启动,在1.5 s突加1/2负载扰动(380 A)。转速在0.7 s左右稳定于375 r/min,转速超调量σ%≈9.3%,电流在1.8 s左右稳定于380 A。
3.2 优化调节器参数
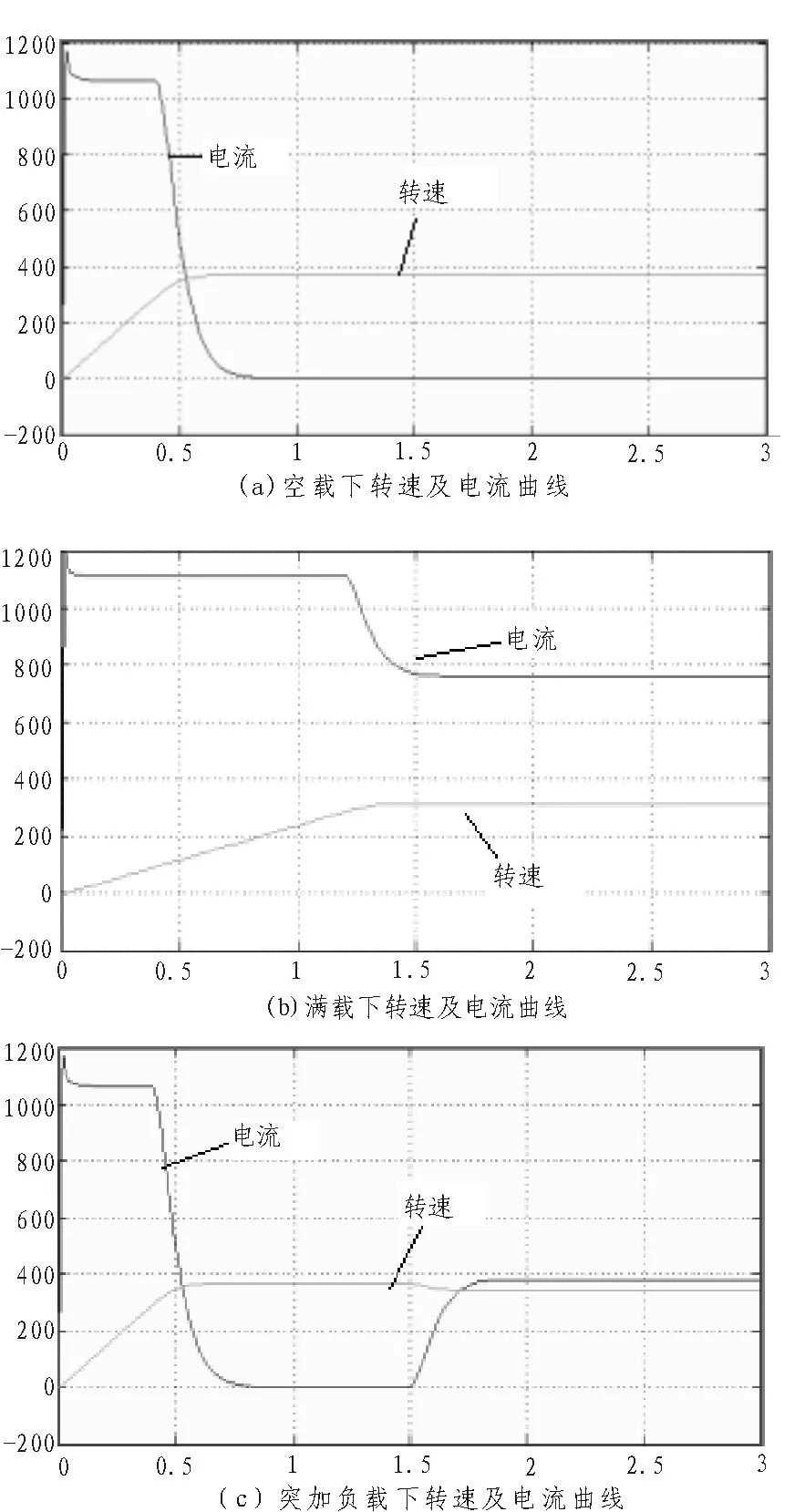
图3 不同工况下的仿真结果
双闭环直流调速系统中转速调节器是主导调节器,对负载的变化起抗扰作用,当到达稳态时可以减小转速误差,电流调节器是使电流紧跟其给定电压变化,并对电网电压的波动起及时抗扰的作用[12-15]。另外,在转速动态调节的过程中,电流调节器能够保证电动机获得允许的最大电流,从而加速动态过程[16-19]。通过分析图3的仿真结果,结合调速系统的性能要求,分别修改电流环和转速环的比例和积分系数,并各自在直流电动机空载、满载和负载扰动的工况下启动得到不同的仿真响应曲线,如图4所示。
分析图4的仿真结果,直流电动机空载启动时,转速调节时间ts=0.6 s,转速超调量σ%=0,与未优化的结果相比,转速变化趋于平滑,峰值电流减小。直流电动机满载起动时,优化后转速的调节时间和超调量没有明显变化,但转速变化平稳,峰值电流减小。电动机在1.5 s突加1/2负载扰动(380 A)时,优化后转速波动较小,峰值电流减小。
4 结论

图4 参数优化后不同工况下的仿真结果
本设计应用工程设计方法计算并校验了双闭环直流调速控制系统电流环和转速环参数,使其满足控制指标要求。在MATLAB中建立了双闭环直流电机调速系统的仿真模型,并进行了电动机空载、满载和负载扰动3种工况下的仿真实验。采用工程设计方法设计调速系统时为了使理论分析与设计变得更加简便,就需要对双闭环直流调压调速控制系统做简化处理,因此,仿真结果显示,工程法确定的调节器参数并非系统的最优参数。本设计通过分析研究仿真结果,对电流和转速调节器比例系数与积分系数进行优化,通过一系列的优化仿真实验得出以下结论:通常情况下,增大转速环与电流环的比例系数,系统的响应时间会变短,系统的超调量增大,稳定性减弱;而增大转速环与电流环的积分系数,系统的稳态误差减小,超调量减小,但响应时间变长。
