绳索驱动的仿生关节设计与仿真分析
2018-05-23王从浩张春林佳裔朱春涛
王从浩, 张春, 林佳裔, 朱春涛
(合肥工业大学机械工程学院,合肥 230002)
0 引言
随着机器人技术的发展,机器人逐渐朝着类人化、智能化方向发展,这就使得仿生学逐步发展起来,仿生学是模仿生物体的结构和工作原理进行机械和控制设计[1-2]的方法。其中仿人行走机器人是仿照人体结构和运动原理设计的仿人形机器人,具有多学科交叉、技术含量高、研究和开发难度大的特点[3],正因如此,各国也将其作为国家技术发展水平的标志。
目前仿人机器人的外形和人类比较类似,但是由于传统的机器人将人体的肌肉肌腱驱动简化成电动机加减速器安装于关节进行驱动,这种设计的结果导致机器人关节的运动不能像人体关节运动一样灵活、自然,呈现机械化运动的特点[4]。对于这个问题,有不少学者提出仿照人体的驱动方式进行机器人的关节驱动,荷兰Delft大学的Wisse教授[5]于2003年研制出基于气动人工肌肉驱动的准被动双足步行机器人MIKE,采用驱动人工肌肉驱动关节能够很好地模拟人体肌肉的特性,但是由于气体的可压缩性会导致精确度降低。美国波士顿公司利用液压驱动研制成功引起轰动的军用机器人“Bigdog”后于2011年研发的Petman仿人机器人[6],具有负载大、速度快的特点,由于液压驱动会带来较大的质量,限制了在其他方面的应用,因此越来越多的学者开始研究利用绳索进行驱动[7],由于绳索与人体的肌腱类似,因此采用绳索驱动关节能使得机器人的关节运动能很好地表现出与人体运动相类似的特征。
本文主要是通过仿照人体关节肌肉肌腱驱动方式,设计一种绳索驱动的拮抗仿生关节,研究关节运动学、动力学,找出绳索长度、拉力与关节转角度的关系,在ADAMS中的Cable模块进行绳索驱动的仿真,以绳索的长度变化量作为驱动函数,比较测量值与给定值判断绳驱动结果的正确性。
1 拮抗仿生关节设计
1.1 关节拮抗原理与构型选择
由关节生物力学可知关节是人体运动的枢纽,是肌肉肌腱和骨组成的杠杆机构的支点,在肌肉和骨的协同作用下产生相应的运动[8]。关节的运动不单单是依靠一根肌肉完成驱动的,而是通过肌群来实现的,其中可以将驱动该关节的肌群分为两类:一是原动肌(起主要作用)、二是协同肌(起辅助作用)[9]。两者构成拮抗关系,这样在关节的运动中能够使得运动更加平稳自然。相对于传统的驱动方式,仿生的拮抗驱动方式无需中间的传动环节,结构更加简单,具有转动惯量小、关节运动灵活的特点。

图1 绳驱动关节构型
根据生物学仿生原理利用绳索代替肌肉肌腱为关节提供驱动力矩[10],绳索驱动的结构构型主要有以下几种:
其中图1(a)采用的是1根绳索与固定于支架处的定滑轮相连,绳索由1个独立电动机带动,依靠摩擦力带动定滑轮转动从而实现关节的转动,该驱动方式能够输出较大转矩,但是由于引入了摩擦力使得这种驱动方式存在不可靠因素。图1(b)采用2根绳索在两侧构成拮抗,关节与固定端铰接,绳索与关节构成杠杆关系,通过2个电动机带动2根绳索的伸缩配合从而实现关节的转动,该驱动方式利用绳索与关节固连不需要依赖摩擦力进行驱动,结构比较紧凑,缺点是转动范围较小、力臂较小,需要较大的驱动力。图1(c)关节与固定端铰接,2根绳索与距离关节旋转中心一定距离的杆件相连,此种驱动方式能够提供较大的工作空间,但是力臂较小需要的驱动力较大。图1(d)与图1(c)的驱动方式类似,只是绳索与杆件的连接位置不同,这种在垂直于杆件方向凸出一定长度的杆,目的是将绳索的驱动力臂放大,从而减小驱动力的大小。
1.2 关节模型的构建
综合考虑各种构型的优缺点,选用图1(d)中的构型,结合关节的运动范围空间以及驱动力臂的大小设计出如图2的绳驱动关节模型。
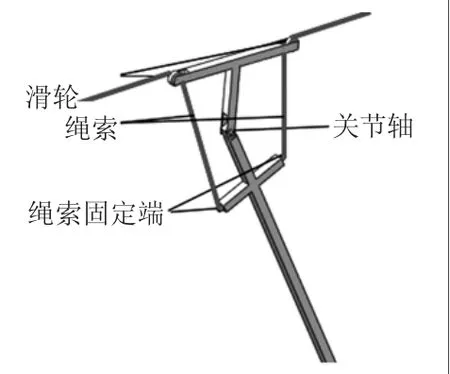
图2 绳驱动关节模型
将模型的上半部分固定,下半部分围绕关节轴转动,关节轴处于中间位置,用于改变力传递方向的滑轮安装于关节轴的上方两侧对称的位置,绳索固定端安装于关节轴下方两侧对称位置,两侧的电动机带动绳索牵引关节转动。通过改变滑轮和绳索固定端与关节轴的位置实现不同力臂和运动范围的关节设计。
2 关节运动学分析
关节简化模型如图3所示,以关节旋转中心为原点建立坐标系,关节转角逆时针方向为正方向。xoy为基坐标系,xmmmym为动坐标系,A、B点为动点,C、D、O为固定点。
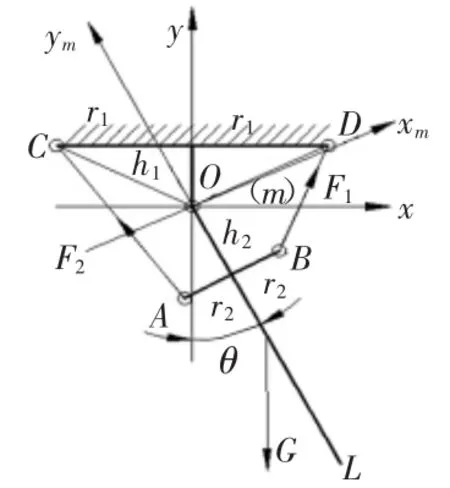
图3 关节简化模型
为精确给出关节转角与绳索伸缩量关系的表达式,摆杆处于竖直状态为初始姿态,在基坐标系中初始姿态下各点的坐标分别为A (-r2,-h2)、B (r2,-h2)、C(-r1,h1)、D(r1,h1),关节转角为θ,旋转后的各点在基坐标系的坐标利用坐标转换原理[11-13]计算得:
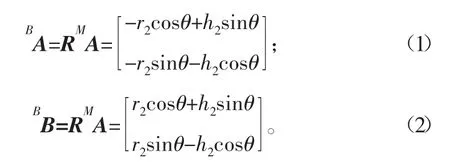
进而能够得到:

则可以得到两侧绳索长度与关节角度的关系:

式中:Lr表示关节右侧绳索长度;Ll表示关节左侧绳索长度。
3 基于ADAMS_cable模块的仿真分析
3.1 ADAMS_cable建模原理及模型仿真
Cable是ADAMS 2013版本以后才新添加的一个插件,目的是帮助用户快速建立绳索仿真模型,完成工程上的应用,和以往采用套筒建立模型相比,Cable模块具有Anchor(锚固)、Pully(滑轮)、Roller(卷筒)建模的功能,可快速进行参数化建模。
Cable模块把钢丝绳离散成若干个圆球,利用轴套力进行连接,利用广义力将其连接起来,可以定义刚度、阻尼。轴套力的计算方程如式:

式中:F为钢丝绳之间的受力矩阵;K、C分别为系统的刚度矩阵、阻尼矩阵;X分别为位移、速度矩阵;F0为初始受力矩阵[14]。建立的SolidWorks三维模型。模型的参数为r1=75 mm,r2=40 mm,h1=80 mm,h2=80 mm。将建立的三维模型另存为parasolid(x_t)格式的文件,打开ADAMS/view,点击File菜单下Import选项,file type选择parasolid类型,file to read中选择要导入的文件路径,在关节处设置转动副,设置重力方向为Y轴负方向,关节杆件材料设置为钢,模型的参数质量为8.76kg,转动惯量为Ixx=600.56kg·mm2,Iyy=596.64 kg·mm2,Izz=4.697 kg·mm2。之后是建立绳索模型进行仿真,首先要得到两侧绳索长度的变化量作为驱动函数,给定关节转角为人体下肢髋关节一个步态周期的角度变化[15],利用第2节的运动学分析求解出两侧绳索的长度变化作为驱动函数。建立绳索模型,设置滑轮和接触参数如表1。之后需要设置绳索的参数见表2。
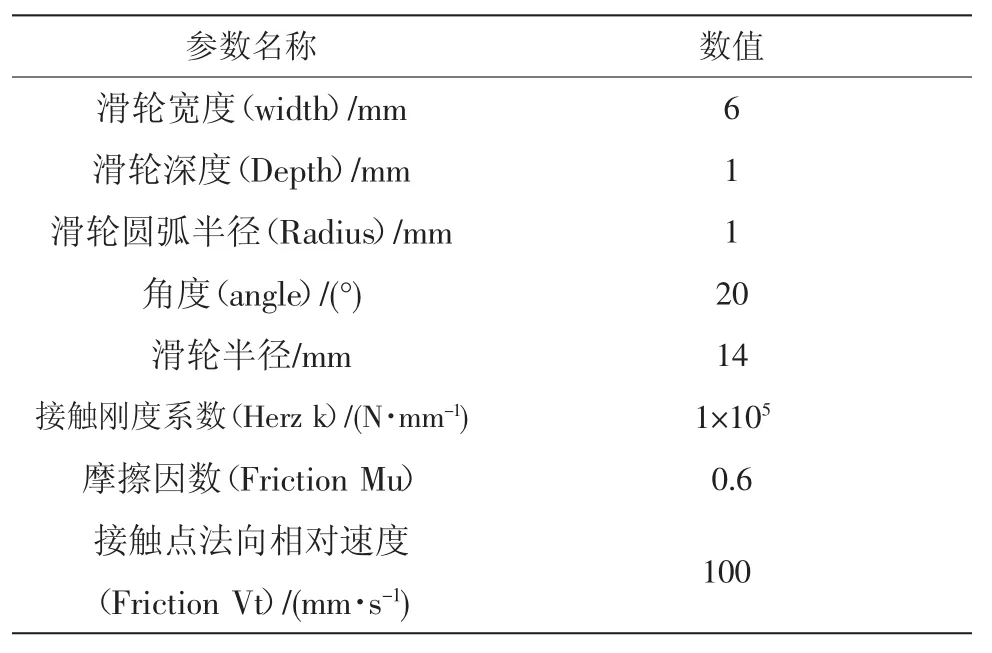
表1 滑轮几何与接触参数设置
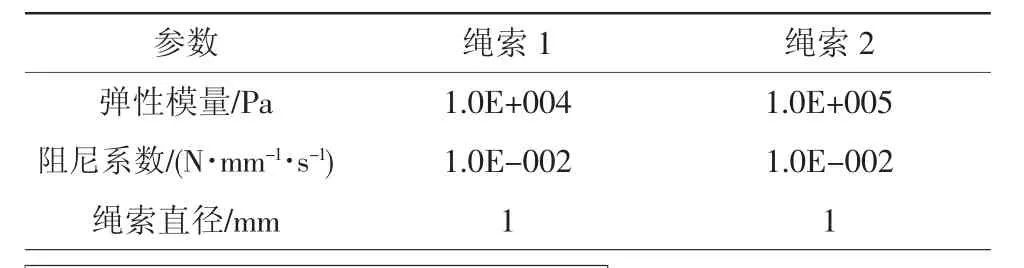
表2 绳索参数设置
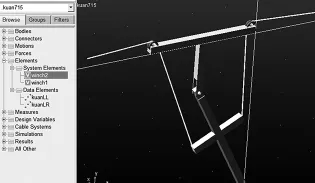
图4 绳索仿真模型
建立绳索模型如图5,图中右侧为绳索1,左侧为绳索2。将仿真时间设为10 s,步长设为500步,开始进行仿真。
3.2 ADAMS仿真结果分析
仿真结果如图5所示,其中θ为关节测量的关节角度变化,F1、F2分别为右侧和左侧绳索拉力的变化,在0~3.5 s和6.5~10 s时间段内,主要是F1起作用,F2拉力变化较小,0~3.5 s时间段内由于关节角度是正向逐渐减小的所以F1先是迅速增大到100 N之后是逐渐减小到0 N,6.5~10 s时间段内关节角度是正向逐渐增大的,所以F1是由0 N逐渐恢复到100 N,在3.5~6.5 s之间关节角度是反向增大的,这时F1不再提供拉力,F2则是呈现先增大后减小的变化形式。
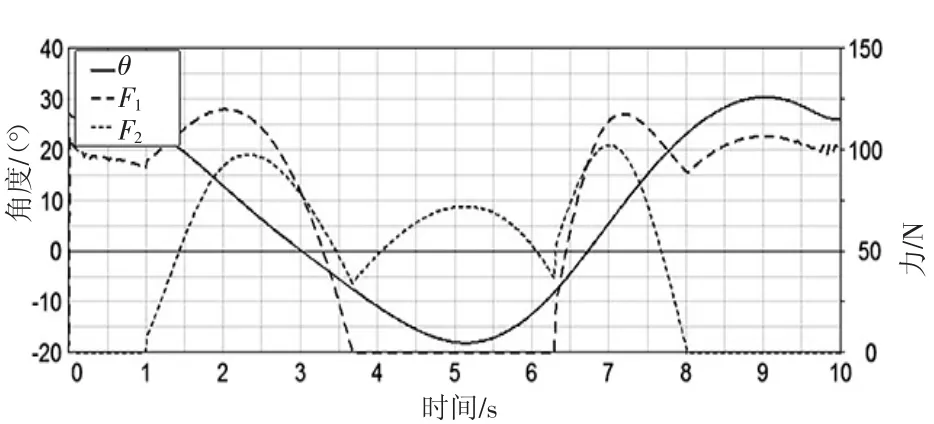
图5 测量结果
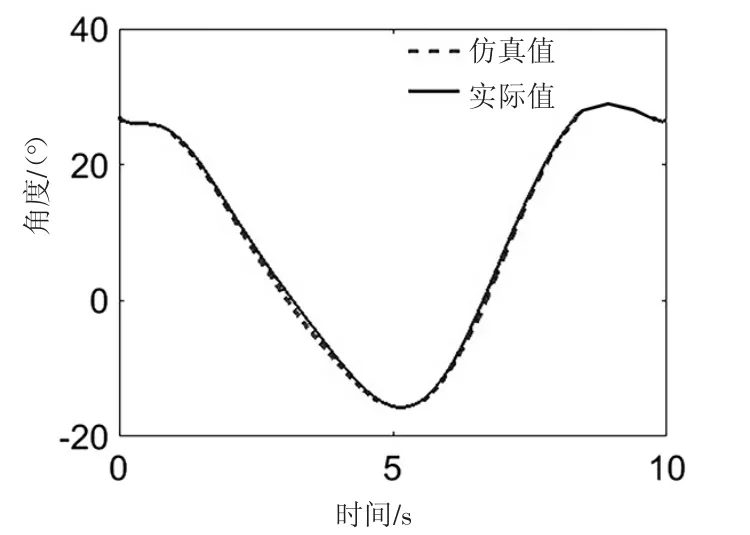
图6 结果对比
为检验绳驱动的正确性需要将仿真关节转角与给定实际关节转角进行对比,如图6所示,虚线表示仿真值,实线表示实际值。从图6中可以看出两者的相似度较高几乎完全重合。由仿真结果可知,绳索弹性模量越大,则绳索拉力越大,关节角的最低点位置会低于正常值。相反,绳索的弹性模量太小,则绳索的拉力较小,会导致关节角的最低点位置高于正常值,所以选择合适的弹性模量是绳索仿真成功的关键。
4 结论
本文通过仿照人体拮抗肌肉设计一种基于绳索驱动的仿生关节,该关节具有工作空间大、力臂较大的特点,通过建立的运动学、动力学模型得到关节转角与两侧绳索长度和拉力的关系,利用ADAMS中的cable模块建立绳索的仿真模型,以绳索的长度变化为驱动进行仿真,仿真结果表明,绳索驱动能够准确驱动关节转角,同时能够测得两侧拉力所需要的拉力大小。本研究对于机器人的关节的设计与绳索驱动的研究具有一定的借鉴意义。
[参 考 文 献]
[1] 于海涛,郭伟.基于气动肌腱驱动的拮抗仿生关节设计与控制[J].机械工程学报,2012,48(17):1-9.
[2] 谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-973.
[3] 李允明.国内外仿人机器人发展概况[J].机器人,2005,27(6):561-569.
[4] 应申舜,秦现生,任振国,等.基于人工肌肉的机器人驱动关节设计与研究[J].机器人,2008,30(2):142-146.
[5] WISSE M,VAN FRANKENHUYZEN J.Design and construction of MIKE;a 2-Dautonomous biped based on passive dynamic walking [M]//Adaptive motion of animals and machines.Springer,2006:143-154.
[6] HUDYJAYA J,MIR-NASIRI N.Development of Minimalist Bipedal Walking Robot with Flexible Ankle and Split-mass Balancing Systems[J].International Journal of Automation and Computing,2013,10(5):425-437.
[7] 桑秀凤,陈笋.绳驱动并联机器人绳索拉力及工作空间求解[J].应用科技,2014,41(4):51-56.
[8] 姜海波.人体下肢关节系统的生物力学行为研究[D].徐州:中国矿业大学,2008.
[9] 马全超.基于拮抗原理的致动原件设计[D].上海:上海交通大学,2012.
[10]刘攀.绳索牵引机器人及虚拟重力系统研究[D].哈尔滨:哈尔滨工程大学,2010.
[11] 王斌锐,李璟.运动学建模与控制系统设计[M].北京:清华大学出版社,2014.
[12]张立勋,王克义.绳索牵引康复机器人控制及仿真研究[J].智能系统学报,2008,3(1):51-57.
[13]李冉.柔索驱动并联机器人的建模与控制[D].太原:太原科技大学,2015.
[14] 郭卫东,李守忠.ADAMS2013应用实例精解教程[M].北京:机械工业出版社,2015.
[15]陈洋.基于人体运动规律和足部特性的仿人机器人行走运动研究[D].合肥:合肥工业大学,2016.