神经网络解耦控制在某无人机组件测试系统的应用
2018-05-23,,
,,
(中国航天空气动力技术研究院 特种飞行器总体设计部,北京 100074 )
0 引言
本论文提到的无人机组件测试系统,主要用于对某型号无人机组件进行相关性能测试和试验验证。该无人机工作状态下的环境要求苛刻,在高海拔情况下,外界大气温度达到-70 ℃~-50 ℃,部分部件承压达到2 MPa。所进行的地面测试能够精确模拟不同的机上环境,得到不同机载设备的散热功耗等数据,从而保证无人机舱内飞控、测控、电气等电子设备在要求的使用温度范围内正常工作。
整个系统由气源系统、热路试验回路、冷路试验回路、低温试验回路、计算机测控系统和产品试验段系统组成。该系统主要完成对多条回路的温度、压力、流量的测量和控制,所进行的试验项目包括调压特性试验、温控特性试验、气流谐振试验、热冲击试验、压力和温度循环试验等。具体而言,控制对象是由电加热器、高压引气控制组件、预冷器调节控制组件、预冷器、压力调节/关断控制组件、引气单向控制装置以及系统试验件管路组成的一套气源分系统。
该航空产品测试系统是一个典型的多变量MIMO系统,有多个输入和输出,3个被控量温度、压力、流量之间存在强耦合,实施控制时往往“牵一发而动全身”,传统的控制方法难以取得良好的控制效果。
新世纪以来,以神经网络为代表的智能控制理论发展日新月异,为工业过程多变量解耦控制这个老问题提供了新的解决思路。
1 航空测试系统原理及结构
航空测试系统采用分布式控制系统架构,总体可分为:检测与执行级、下位直接控制级和上位管理监控级[1]。该系统以工业级计算机为核心,集成单元组合仪器及微处理器,集中管理、分散控制。图1为航空测试系统其中一路管道流程图。
系统试验段中共有76个测温点,其中热路最高温度值达到700 ℃, 温度传感器采用Ⅰ级热电偶;冷路和制冷路温度最高在300 ℃,选用PT100A级铂电阻。压力测量共24点,选用高精度等级为0.1级的压力传感变送器。流量测量点67点,选用E&H质量流量计。
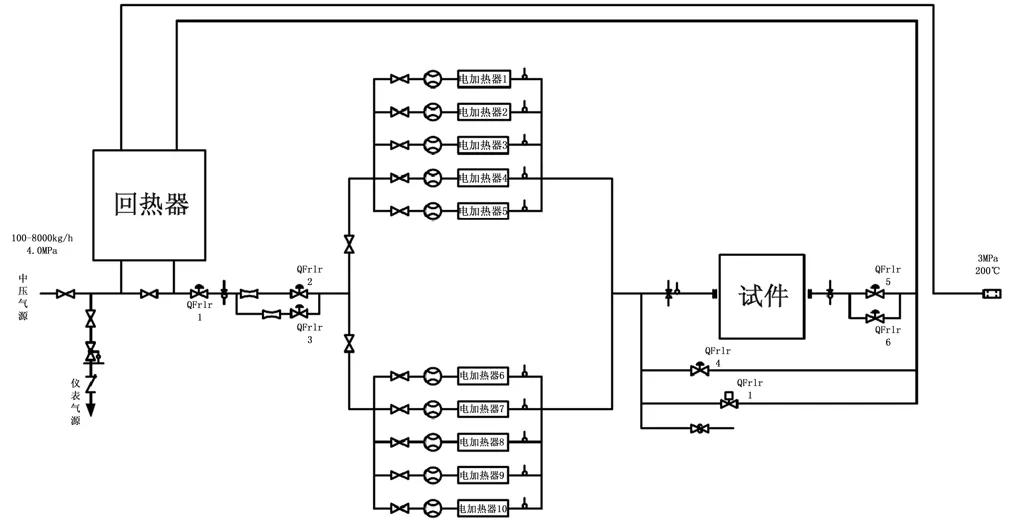
图1 热路试验流程图
计算机通过仪表来控制调节阀或调功器等设备工作,系统中各控制参数的控制算法均由计算机完成,控制执行机构包括气源压力调节阀、出/入口压力调节阀、超压保护调节阀、1~14号电加热器、气源流量调节阀、流量辅调阀等。系统主要被控参数指标如表1。

表1 主要被控参数指标
传统控制方法在进行多变量耦合系统的控制时,必须获得对象参数,再依次设计补偿器、解耦器和控制器[2]。然而多变量系统的参数一般不易获得,补偿器、解耦器和控制器的实现与一体化难以实现,故而采用传统控制方法不足以完成对强耦合多变量系统的有效控制[3]。
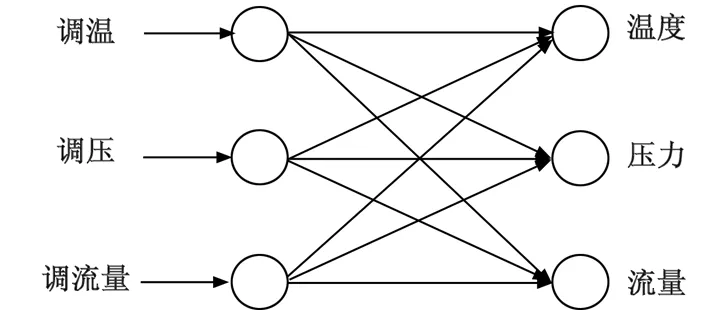
图2 系统控制量耦合关系
2 解耦控制方案设计
本文根据神经网络的相关知识,采用了一种新型的PID神经元网络,来尝试解决强耦合多变量系统的控制难题。所建立的PID神经元网络基于前向多层网络,是对其的一种拓展,其特殊之处在于隐含层输入输出函数依据PID控制规律选取,从而使得隐含层神经元具有比例、积分和微分处理功能[4]。
由相关理论可知,PID神经元网络有非常强的自主学习能力,可以实时地获得系统给定值和测量值,根据误差自动调整前向网络的权值。应用该种PID神经元网络控制器,不需要事先知道控制对象的结构和参数[5]。理论上可以并行完成系统解耦控制工作,获得理想的静态和动态特性。这种PID神经元网络对多变量系统的解耦控制方法最早由广州大学的舒怀林老师提出,笔者对该方法进行了改进,在连接权系数的学习过程中加入了改进的遗传算法,目的是克服多层前向神经网络学习速度慢,易陷入局部的最小值等缺陷。
2.1 PID神经元网络
多控制量PID神经元网络的结构,纵向上分为三层:输入层、隐含层和输出层,每层神经元的数目为2n:3n:n。横向上n个控制量的神经元网络可以看作n个平行的子网络,各子网络有相似的结构[6]。多控制量PID神经元网络拓扑结构如图3所示。

图3 多控制量神经元网络
图中,n个平行子网络包括三层:输入层,左边一列两个神经元,分别接收控制量的设定值和当前值,设定值为X11,X21,…,Xn1,当前值为X12,X22,…,Xn2;隐含层,中间一列3个神经元,由3个分别具有比例(P)、积分(I)和微分(D)处理功能的神经元构成;输出层,右边一列一个神经元,输出当前计算得到的控制量,即Y1,Y2,…,Yn。图中ωij和ωjk是网络连接权值。
2.1.1 前向算法
输入层包含2n个神经元,输出值xsi即输入值Xsi,公式如下:
xsi(k)=Xsi(k)
(1)
隐含层包含3n个神经元,这些神经元的输入值为xsi乘以网络连接权值ωij,公式如下:
(2)
隐含层具有比例、积分和微分处理功能的神经元各有n个,输出的计算公式如下:
比例神经元
us1(k)=kp*nets1(k)
(3)
积分神经元
Us2(k)=nets2(k)+Us2(k-1)
us2(k)=ki*Us2(k)
(4)
微分神经元
us3(k)=kd*[nets3(k)-nets3(k-1)]
(5)
输出层的输出为隐含层所有神经元输出与网络连接权值为ωjk的乘积之和。有n个神经元,构成n维输出向量,计算公式如下:
(6)
2.1.2 反传算法
在多控制量PID神经元网络控制的过程中,根据误差反向传播,修正网络连接权值,使得被控量逐渐趋近于设定值。
计算误差公式:
(7)
式中,n为输出结点个数,yh(k)为预测的输出,r(k)为控制目标。
多控制量PID神经元网络的权值修正一般采用梯度学习算法,可通过增加动量项提高学习效率[7],公式如下:
隐含层到输出层:
η1*[ωjk(k)-ωjk(k-1)]
(8)
输入层到隐含层:
η1*[ωij(k)-ωij(k-1)]
(9)
式中,η、η1为学习速率。在实际的应用中,该修正过程对初值的选择要求较高,寻优过程往往收敛于局部最优解。
2.2 遗传算法训练PID神经元网络参数
遗传算法是近十年来发展起来的一种最优化控制方法,可以在全局域内进行鲁棒搜索,适用范围广,可以有效地避免寻优过程收敛于局部最优解,而且没有BP算法对初值敏感的缺陷[8-9]。
采用遗传算法对神经网络的权值进行训练,关键部分是遗传算子的设计。一般包括选择、交叉和变异算子。
1)选择。
采用比例选择算子,个体i被选中的概率为
(10)
式中,M为种群规模,Fi为个体i的适应度。种群中的个体被选中的概率主要取决于其适应度大小[10]。
2)交叉。

(11)
针对算法的后期可能出现的早熟现象,设计了自适应的α参数:
(12)
式中,fmax为种群中的最大适应度值,f′为用于交叉的两个染色体中较大的适应度值,fav为种群平均适应度值。
3)变异。

(13)
(14)
由上可知,该算法既保证了适应度高的个体更容易将其特性遗传到下一代,同时赋予适应度低的个体较大的交叉变异概率。从而可以不损失种群的多样性,防止出现早熟现象,又能保证算法的收敛性。
PID神经元网络的学习算法步骤总结如下:
1) 算法参数初始化,随机生成初始种群即M组神经网络的连接权值;
2) 神经网络将本代各染色体作为网络权值,运行前向算法,得到目标函数;
3) 计算适应度值,若满足则输出参数,结束算法;否则,进行下一步;
4) 进行选择、交叉、变异算法操作,产生新一代种群;
5) 判断是否满足移民准则,是则把新移民代的染色体送到PID神经网络控制器,更新种群,转第2步,否则直接转第2步。
3 控制方案验证
3.1 MATLAB仿真
被控对象选取一个3输入3输出的复杂耦合系统,由以下方程描述:
(15)
多变量PID神经元网络和被控对象构成闭环系统,结构如图4。

图4 PID神经元网络闭环控制系统
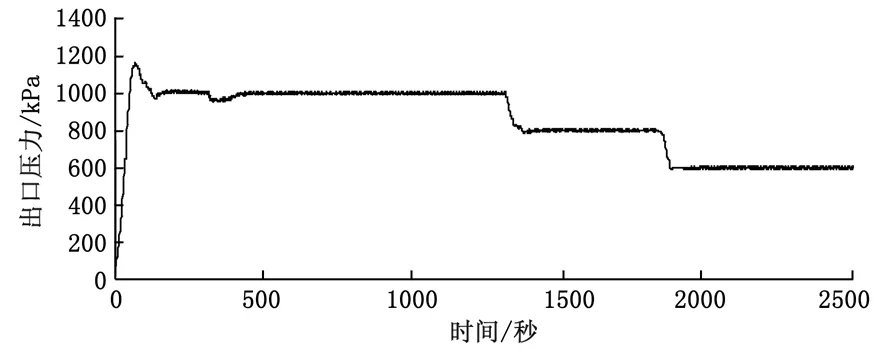
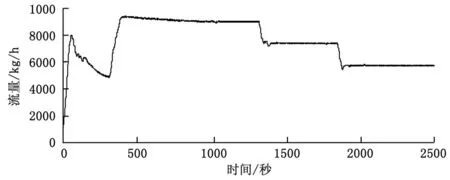
对于控制量目标值r1在0 仿真图中,纵坐标表示实际输出,横坐标为采样时刻。由图5可以看出,在r1的跳变时刻,输出y1能够迅速跟随,输出y2,y3受影响较小,仍能保持稳定,对r2,r3也是如此,解耦控制是成功的。 图5 仿真结果 进行热路两参数状态切换性能调试试验,检验系统温度、流量/压力控制性能。 给定气源压力1 500 kPa~2 500 kPa,控制热路出口温度和出口压力,测定热路出口流量。调试参数:排气反压开度20%,试验状态由(180 ℃、1 000 kPa)切换至(200 ℃、800 kPa)切换至(200 ℃、600 kPa),相应流量变化为9 300 kg/h→7 400 kg/h→5 700 kg/h。 试验结果如图6、图7、图8。 图6 状态切换测试温度控制曲线 图7 状态切换测试压力控制曲线 图8 状态切换测试流量控制曲线 经验证,该控制方法取得了较为满意的控制效果,在试验系统入口压力、温度、流量等参数的控制范围内,进行试验状态转换时,从一个试验状态的参数控制值转换到另一个试验状态的参数控制值,由计算机采用文章中的控制算法自动控制完成,转换过程平稳,试验状态转换的过渡过程较短,控制精度满足压力±0.5%FS、流量±1.0%、温度±2.0 ℃。 本文所设计的基于遗传算法的神经网络解耦控制方法是将现代智能控制理论应用于多变量测控系统的一次有益尝试,经试验验证该方法完全满足无人机组件测试系统的项目需求,有力地支持了相关型号无人机的研制工作。 参考文献: [1]尹禄高,刘旺开,沈为群. 基于组件与设计模式的测控系统[J]. 计算机测量与控制,2010,18(2):360-362. [2]吴宏岐,张军利,周妮娜. 基于神经网络的智能控制技术及应用[J]. 信息技术,2004(1):1-3. [3]平玉环,李宗耀,孙 剑. 模糊神经网络在解耦控制中的研究[J]. 控制工程,2009,16(4):461-463. [4]李佳颖. 一种微水仪/露点仪校验系统的设计[D].郑州:郑州大学,2016. [5]代冀阳,应 进,李华英,等. 基于PID网络的航空发动机多变量系统解耦控制[J]. 计算机仿真,2011,28(12):27-31. [6]俞凯耀,席东民. 人工鱼群算法优化的PID神经网络解耦控制[J]. 计算机仿真,2014,31(10):350-353. [7]应 进. 基于粒子群算法的航空发动机多变量控制研究[D].南昌:南昌航空大学,2011. [8]任 一,刘旺开,何 理. 遗传算法模糊PID测控系统在环控试验台中的应用[J]. 计算机测量与控制,2012,20(3):690-693. [9]马 杰. 基于神经网络的自适应噪声主动控制研究[D].杭州:浙江理工大学,2011. [10]胡云山,申 意,曾 光,等. 基于遗传策略的SHA-1差分路径搜索算法[J]. 信息工程大学学报,2016,17(04):390-395. [11]梁昔明,肖 伟,龙 文,等. 基于梯度信息指导交叉的遗传算法[J]. 计算机应用,2010,30(10):2582-2584.
3.2 航空测试系统实际应用效果

4 结论
