动 态 云 模 型 编 码 的 图 像 增 强
2018-05-22姚成乾
陈 伟, 姚成乾
(永城职业学院 电子工程信息系, 河南 永城 476600)
0 引 言
图像在传输过程中,由于人为以及环境噪声因素的影响,导致了获得的图像暗淡或更加模糊,不能准确识别图像信息,严重地影响了图像质量,因此对图像增强十分必要[1-2]。滤波算法对图像增强是以图像分辩率的降低为代价[3],对信噪比较低的图像进行增强时效果较差;全局二值化算法计算简单,速度较快[4],但是若增强背景变得复杂,难于找到一个适用于整幅图像的统一阈值;游程编码算法特别适用于灰度等级少、灰度值变化小的图像[5],但是传输中若某个符号发生错误,影响整个编码序列;跳白块编码算法利用图像有大量白色区域这一特点而提出的编码[6],但是二值图像在其不同的地方像素的分布情况是不一样的,导致了编码效率低;方块编码算法把整个图像分成等大小的子块,根据块内像素出现概率编码,简单、易于实现[7],但是若方块尺寸过小时,以致信息集合的数量太大,以致编码难以应用;小波变换算法克服了增强窗口大小固定的缺点[8],但是小波基的选取太难,同时冗余度很大。
本文采用动态云模型编码算法,通过高斯云产生器产生云模型的云滴;确定云模型编码域以及编码规则,动态调整控制参数;对图像像素背景区域和目标区分编码,给出了增强过程。实验仿真显示本文算法对图像增强清晰,运行时间较少,性能指标较优。
1 动态云模型编码过程
1.1 基于高斯云的云滴产生器
1.1.1云模型
云模型是实现定性与定量之间相互转换的不确定性模型[9-10]。设U是一个用精确数值表示的定量论域,C是U上的定性概念,对于论域中的任意一个元素x,且x是C的一次随机实现,x对C的确定度μ(x)∈0,1,是有稳定倾向的随机数,则称
μ:U→0,1, ∀x∈U,x→μ(x)
(1)
式中:x在论域上的分布称为隶属云,简称云,云是从论域U到区间[0,1]的映射,其中每一个x称为每一个云滴。
基于高斯分布可以构成高斯云模型,它有3个数字特征,可表示为(Ex,En,He),Ex是论域空间中最具代表性的数值,即期望;熵En反映了论域中可被接受的数域范围,是标准差的期望;超熵He是标准差的标准差,在数域中代表数据的凝聚性,是定性概念的不确定性度量。
1.1.2产生云滴过程
具有数字特征(Ex,En,He),N个云滴的生成过程如下[11]:① 生成以En为期望,He2为方差的一个正态随机熵
,He2)

③ 计算
具有确定度yi的xi成为论域U中的一个云滴。
④ 重复步骤①~③,直至产生N个云滴。
不同高斯云模型比较如图1所示。
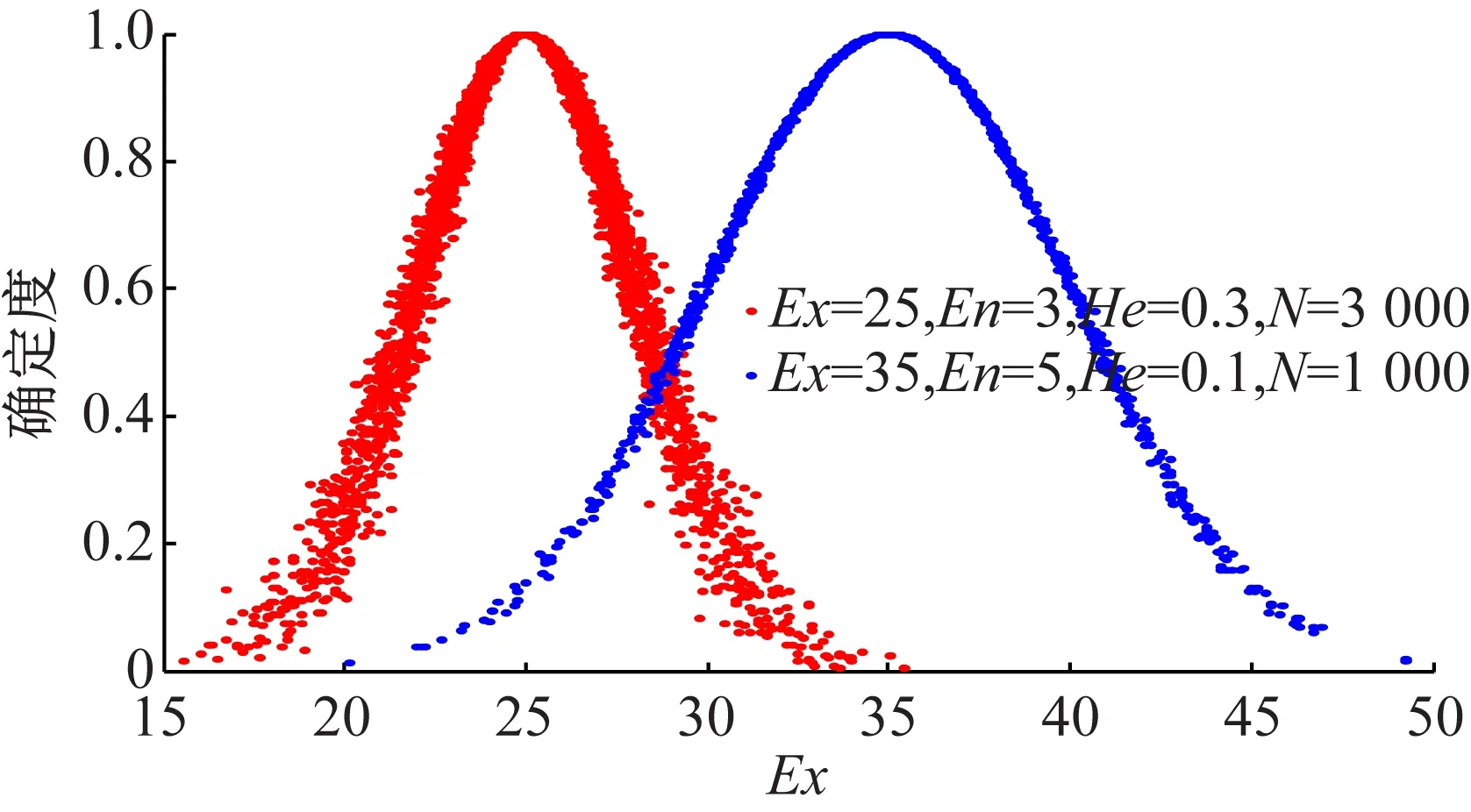
图1 不同高斯云模型比较图
从图1可以看出,云滴N的个数越多,越能反映该定性概念的整体特征;Ex在论域中的中心点;En反映定性概念的云滴离散程度,也反映了论域空间中可被概念接受的云滴的取值范围;He的大小间接地反映云的厚度,超熵越大,云的厚度越大。
1.1.3云模型编码域选择
若要对高斯云进行编码,由于其云滴所处的位置不同决定其对数据优化的贡献率,高斯云群中的云滴根据其对概念的贡献的不同可以划分成骨干域、基本域、外围域和弱外围域,如表1所示。
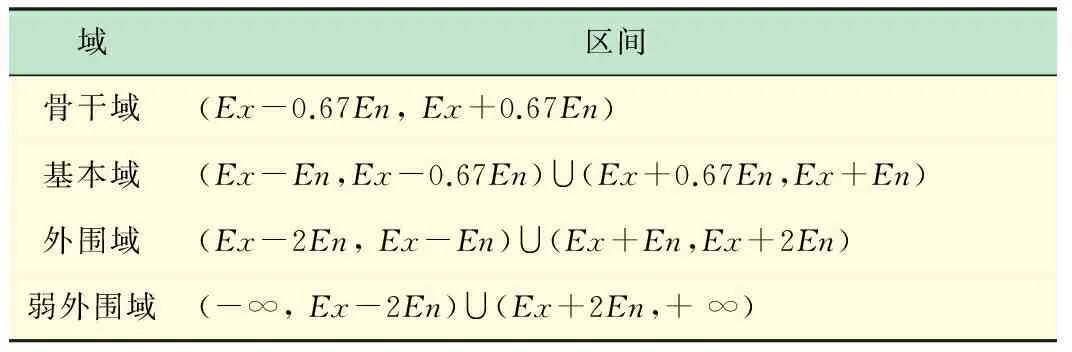
表1 云模型域划分
用偏离度θ来衡量某一状态下云重心与正理想状态下云重心的差异[12],θ值越小,表示此状态偏离正理想状态越小;θ值越大,则偏离正理想状态越大,把各云滴属性指标归一化后的重心向量值乘以相应权重值,再相加,即可得偏离度θ值,
(2)

1.2 编码规则
1.2.1编码过程
图像像素的灰度值作为云模型的云滴[13],云滴首位用二进制0、1值表示,其中0表示其像素的灰度值小于图像平均灰度值,1表示其像素的灰度值大于图像平均灰度值;中间位的位数最大为8位二进制,代表像素空间位置;末位代表决策变量。通过云滴的编码表示像素的位置和灰度特征,如xij:i为云中的第i个云滴;j为该云滴的第j个决策变量。决策变量用m个二进制位编码表示,长度为l=mD,D为云滴的维数。每个云滴末位有2个决策变量,每一个决策变量由5位二进制编码,第一个决策变量表示相似性属性,其值越大则越相似,相似性属性利于判断像素是目标还是背景,第二个决策变量表示权重性属性,值越大则权越大,利于判断像素在目标或者背景中的性质,同时也利于判断其周围像素属性,表2给出了xij的决策部分编码规则。
决策变量为编码图像划分了不同的区域。
1.2.2云编码个体的评价
设云编码个体Pi=x1,x2,…,xn,对变量xm对应的云进行采样的云为c1,c2,…,cn。设云滴数量为

表2 决策部分编码规则
N,高斯云发生器算法生成云对个体Pi进行采样[14]。采样后的个体Pi由解空间中的N个点组成,取N个点中的最优点即代表云编码个体Pi的适应度值。
1.3 动态控制过程
En反映了获取最优解的能力[15],控制参数En的动态调整如下:
(3)
式中:k1为编程可搜索范围1/3;k2为编程可搜索范围1/6;fmax、favg分别为云中适应度的最大值和平均值;f′为迭代操作中个体中较大的适应度;α=9.906 541 6。
2 图像增强
2.1 云模型编码划分图像
云编码是对图像像素进行背景区域和目标区分[16],对于任意像素(i,j),把包含该像素在内的其周围4个像素集合称为像素(i,j)的邻域,如图2所示4-邻域结构。
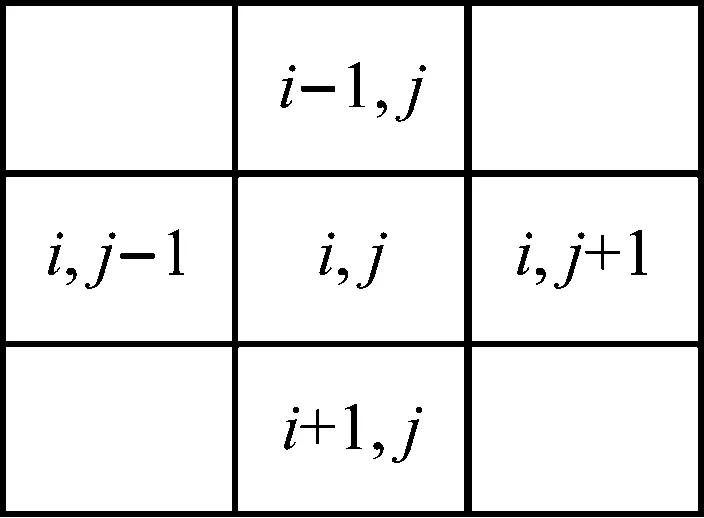
图2 4-邻域结构
若(i,j)编码为:1000111111110010101, (i+1,j+1)为1111111111110010101,只有码头和决策部分一致条件下,才能够判断(i+1,j+1)与(i,j)属性相同。从像素(i,j)到像素(in,jn)的路径是指一个像素序列(i,j),(i1,j1),…,(in,jn),其中像素(ik,jk)是像素ik+1,jk+1的近邻像素,0≤k≤n-1.如果近邻关系是4-连通的,则路径是4-路径,如图3所示。
图3 4-路径示意图
通过棋盘距离:
dChess=max(|i1-i2|,|j1-j2|)
(4)
找到一幅图像中2个连通成分之间的距离,这样可避免误增强的发生,因为只有2个连通成分的码头才为一致。
2.2 双量子算法增强过程
输入图像f中m,n处像素的双量子比特态为|ψ〉mn,m∈1,2,…,M,n∈1,2,…,N,第1个量子比特态反映以m,n为中心区域的灰度中值;第2个量子比特态反映以m,n的灰度值[17]。双量子比特态的4个基态为|00〉,|01〉,|10〉和|11〉,双量子比特态处于这4个基态的叠加态:
|f′(l,k)〉=cosf(l,k)·π/2|00〉+
sinf(l,k)·π/2|01〉+cosf(l,k)·π/2|10〉+sinf(l,k)·π/2|11〉
(5)


(6)
E(l,k)为增强后图像,灰度值范围[0,255],其中fi为归一化数值。设图像质量测量函数(Quality Measurement Function,QMF)为:
(7)

算法过程:① 输入图像,通过动态云模型进行编码;② 对比像素之间的编码,找出编码之间的差异;③ 对差异编码的像素进行双量子比特态测量,获得双量子比特最佳概率;④ 对图像增强,满足图像质量测量函数,转至步骤⑤;否则转至步骤②;⑤ 输出图像。
3 实验仿真
3.1 增强视觉分析
实验PC配置为CPU3.0 GHz、内存4 GB、IntelH61主板,集成显卡,Matlab编程实现仿真,原始模糊Lena图像如图4(a)所示,各种算法的增强如图4(b)~(h)所示。图4(h)为本文算法增强结果,图4 (b)为滤波算法增强结果,图4(c)为全局二值化算法增强结果,图4 (d )为游程编码算法增强结果,图4(e)为跳白块编码算法增强结果,图4(f)为方块编码算法增强结果,图4(g)为小波变换算法增强结果。从增强结果中可以看出,本文算法能够对模糊的图像进行增强,增强结果清晰,同时背景净化,使得人像和背景更加区分,其他算法增强结果虽然比原始灰度图像有所改善,但是依然无法清晰度需求,达不到增强图像的目的。这是因为本文算法以图像影像中的像素灰度值为观测值,在云发生器中得到该像素隶属度,云模型中云滴的选择域也具有多样性和重要性,使得两个连通的像素域能够进行正确增强。
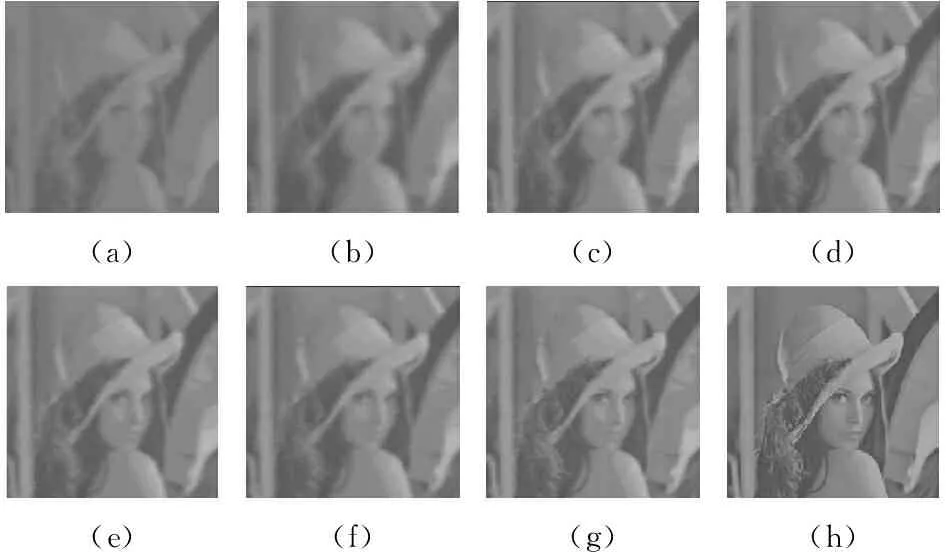
(a)(b)(c)(d)(e)(f)(g)(h)
图4 增强对比结果
3.2 算法性能分析
峰值信噪比(Peak Signal to Noise Ratio,PSNR)是图像灰度的峰值与噪声方差之比,单位是dB,其评价相对客观,
(8)
式中:f(x,y)为增强后图像;g(x,y)为增强前图像;M、N为图像宽和高。PSNR值越大,表明增强质量越好。
偏差指数(Difference Index,DI)用来比较增强图像和标准图像偏离的程度,定义增强图像的偏差指数的表达式为:
(9)

对图4(a)各种算法完成增强所需要的时间、PSNR值和DI值的仿真结果分别如图5~7所示。
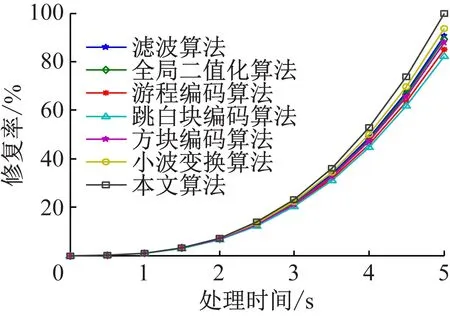
图5 各种算法完成所需要的时间
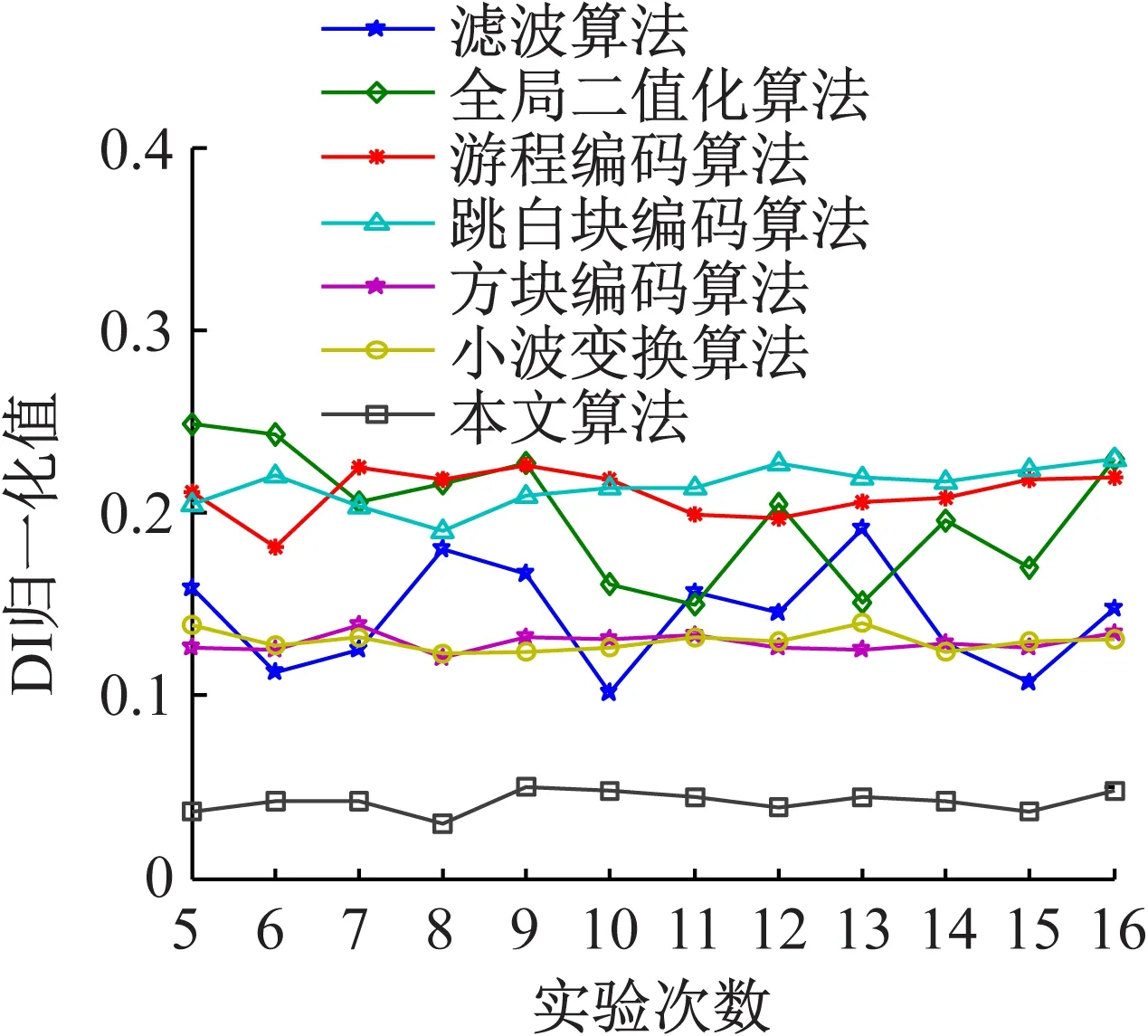
图7 各种算法的DI仿真结果
从图5~7的仿真结果可以看出,本文算法处理时间少,PSNR值最大,DI指标最小,这些指标所具有的优势使得增强效果更加实用。
4 结 语
采用动态云模型编码算法,通过高斯云产生器产生云模型的云滴;确定云模型编码域以及编码规则,动态调整控制参数;对图像像素背景区域和目标区分编码,给出了增强过程,实验仿真显示本文算法对图像增强清晰,运行时间较少,性能指标较优。为图像增强提供一种新思路。
参考文献(References):
[1] 李 尊,吴 谨,刘 劲,等.FA-Criminisi快速图像增强[J].液晶与显示, 2015,30(2):353-358.
[2] 曹 伟,王华彬,石 军,等.基于边缘检测加权引导滤波的指静脉图像增强算法[J].激光与光电子学进展,2017,54(2):0210071-0210076.
[3] Mahfoud Hamidia,Abderrahmane Amrouche.Improved variable step-size NLMS adaptive filtering algorithm for acoustic echo cancellation[J].Digital Signal Processing,2016,49(2):44-55.
[4] Ehsan Ahmadi,Zohreh Azimifar,Maryam Shams.etal.Document image binarization using a discriminative structural classifier[J].Pattern Recognition Letters,2015,63(1):36-42.
[6] 吴慧琳,周激流,龚小刚.基于多子带可逆细胞自动机的二值图像压缩算法[J].计算机应用研究,2013,30(5):1547-1550.
[7] Jayamol Mathews,Madhu S.NairAdaptive block truncation coding technique using edge-based quantization approach[J].Computers & Electrical Engineering,2015,43(4):169-179.
[8] Isa Ebtehaj,Hossein Bonakdari,Shahaboddin Shamshirband,etal.A combined support vector machine-wavelet transform model for prediction of sediment transport in sewer[J].Flow Measurement and Instrumentation,2016,47(3):19-27.
[9] 王 斌,胡辽林,薛瑞洋.基于退化转换及可分离全变差模型的图像增强[J].光学学报,2014,34(10):1011002-1011007.
[10] Deng Wei hui,Wang Guo yin,Zhang Xue rui.A novel hybrid water quality time series prediction method based on cloud model and fuzzy forecasting[J].Chemometrics and Intelligent Laboratory Systems,2015,49(15):39-49.
[11] 刘玉超.一种自适应的多粒度概念提取方法——高斯云变换[J].计算机工程与应用,2015,51(9):1-8.
[12] 刘延华,陈国龙,吴瑞芬.基于改进云模型的网络信息系统可生存性预测[J].福州大学学报(自然科学版),2014,42(4):524-530.
[13] 李 丹,王洪涛.基于云模型编码算法的图像消噪研究[J].图学学报,2014,35(4):643-647.
[14] 阎高伟,石 兵.一种结合云模型思想的粒编码遗传算法[J].计算机应用与软件,2014,31(11):269-274.
[15] 黄 茜,王少龙,徐道磊,等.云的自适应阈值检测方法[J].中国图象图形学报,2012,17(8):960-965.
[16] Mehmet Sahinoglu,Sharmila Ashokan,Preethi Vasudev.Cost-Efficient Risk Management with Reserve repair Crew Planning in CLOUD Computing[J].Procedia Computer Science,2015,62(10):335-342.
[17] 文 桦,熊 娟.基于量子算法的图像增强研究[J].量子光学学报,2015,21(4):321-328.