探空火箭箭头姿态控制系统物理仿真*
2018-05-19毛博年李艳丽邵飞翔卞春江
高 东 韩 鹏 毛博年 李艳丽 邵飞翔 卞春江
1.中国科学院国家空间科学中心,北京 100190 2.中国科学院大学天文与空间科学学院,北京 100049 3.凯迈(洛阳)气源有限公司,洛阳 471003
探空火箭是一种进行临近空间垂直探测、科学载荷空间试验、微重力实验的有效平台[1-2]。随着航天技术的发展,作为航天技术摇篮的探空火箭因其具有独特不可替代的作用,其试验活动也蓬勃发展,美国NASA指出,火箭探空计划在开拓新的学科领域和发展空间技术方面起到了关键性的作用,为发展新仪器、新实验、新观测技术和探索新领域提供了经济而有效的手段,应继续保持强有力的火箭探空计划。
我国于50年代开始研制探空火箭,但60年代后,探空火箭的研制进入了沉寂期,进入21世纪后,探空火箭又逐步走上了进行近地空间探测的舞台。中国科学院国家空间科学中心在子午工程、863计划支持下进行了一系列的火箭探测任务。随着探测任务的不断推进和探测效果的不断提高,在鲲鹏-1B探空火箭设计中,为箭头平台增加了姿态控制系统,协助探空火箭完成既定的探测目标。
探空火箭箭头是一种细长型的、可绕纵轴(火箭最小惯量轴)旋转的一种飞行器,箭头姿态控制系统在飞行任务中,需要完成箭头的消旋/消章控制、三轴稳定控制、姿态机动控制和轴向(纵轴)旋转控制等一系列控制动作,控制要求高,难度较大。在箭头姿态控制系统设计完成后,为了在地面进行姿态控制系统性能的仿真与测试,需要建立基于三自由度气浮转台的箭头姿态控制物理仿真系统。相比箭头姿态控制系统的数字仿真,物理仿真系统具有如下优势:
1)全物理仿真不必用数学模型代替控制系统和控制对象的动力学;控制系统的各环节实物直接参与控制气浮台,可有效发现控制系统设计和某些部件实际模型存在的问题[3];
2)全物理仿真可以充分验证和测试系统各环节的耦合特性,而数学模型很难刻画各环节的耦合作用;
3)将全物理仿真的结果与数字仿真结果进行比较和分析,可以进一步促进姿态控制系统数学模型建立过程,提高数学模型的精度。
与卫星物理仿真系统相比,箭头姿态控制系统需要完成轴向自旋控制、大角度姿态机动等复杂的控制动作,所以其三自由度气浮转台需要具备两轴无限制转动特性,为此需要设计能够适应探空火箭箭头姿态运动特点的三自由度气浮转台。
本文介绍了鲲鹏1B探空火箭的姿态控制系统,对验证该姿控系统的地面物理仿真系统的设计进行了详细介绍,介绍了姿控系统的算法,最后对探空火箭任务的4种模式进行仿真测试。
1 箭头姿态控制系统的组成
箭头姿态控制系统由惯量姿态测量仪、姿态控制器、姿态驱动器和冷气推进器组成。见图 1所示。惯性姿态测量仪实时测量箭头的姿态信息,并将姿态信息发送至姿态控制器,姿态控制器计算出姿态控制指令,姿态控制指令由姿态驱动器转化为冷气推进器的开关信号,驱动冷气推进器产生控制力矩,控制箭头的姿态。
惯性姿态测量仪采用三架构的光纤陀螺和石英加速度计组成,实时测量箭头的姿态角和角速度的信息;姿态控制器采用FPGA+DSP的架构设计,集成了RS422接口电路和总线接口电路,解析姿态信息、进行飞行控制管理和控制指令计算;姿态驱动器基于TI公司的电磁阀专用工业级驱动芯片DRV102进行设计,接收控制器的控制指令,并输出冷气推进器的开关信号。
冷气推进器由高压气瓶、减压器、压力传感器、电磁阀和连接管路组成。冷气推进器布局在箭头的尾部,根据控制要求设计6个喷嘴,每个喷嘴由单独的电磁阀控制。6个喷嘴进行组合可以实现滚动、俯仰和偏航3个通道的姿态控制。
2 箭头姿态控制全物理仿真系统设计
箭头姿态控制全物理仿真系统由三自由度气浮转台、箭头姿态控制系统、电源模块、数据管理单元和数据遥测单元组成。三自由度气浮转台用来模拟箭头的姿态动力学,数据管理单元用来将姿态控制系统的遥测数据和监测数据进行集中管理,数据遥测单元把数据下传至地面计算机,进行实时监测,如图 2所示。
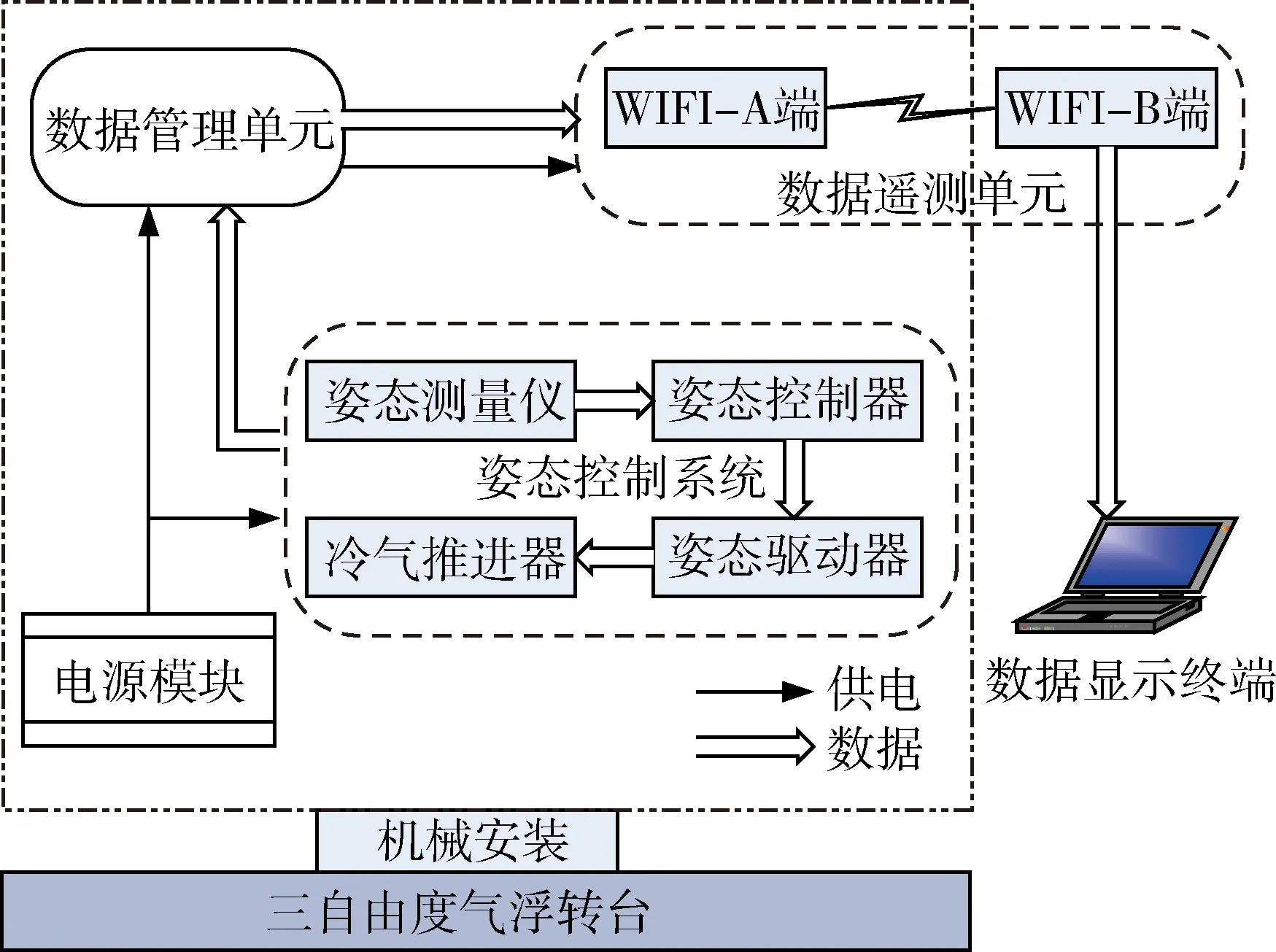
图2 箭头姿态控制系统物理仿真系统组成原理图
三自由度气浮转台是物理仿真的核心设备,气浮转台是依靠压缩空气在气浮轴承与轴承座之间形成的气膜,使转动的部分浮起,从而实现失重和无摩擦的相对运动条件[4-5],以模拟探空火箭箭头在实际飞行过程中的姿态运动。
为了满足探空火箭箭头可以绕纵轴旋转和大角度机动的姿态运动特性,三自由度气浮转台需要具备2轴无限制运动,以充分模拟箭头的姿态运动,满足箭头姿态控制系统的仿真与测试需求。为此参考文献[6]设计了适应鲲鹏1B箭头姿态控制系统的悬臂梁式三自由度气浮转台,来模拟箭头的姿态运动,见图 3所示。
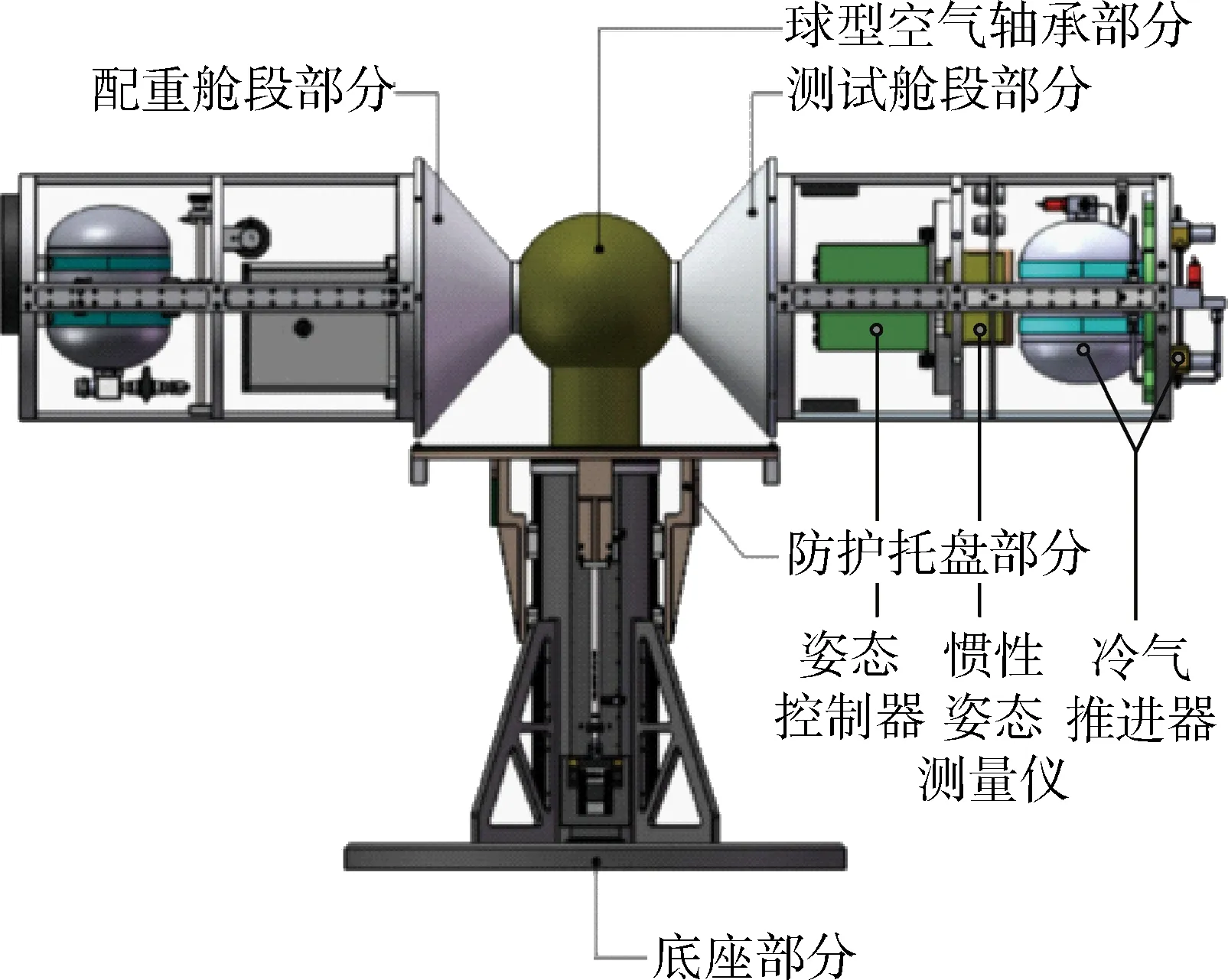
图3 悬臂梁式三自由度气浮转台
该悬臂梁式三自由度气浮转台可以在偏航和滚动两个通道进行360°无限制运动,其主要性能指标如下:
轴向可旋转角度为360°;偏航可旋转角度为360°;俯仰可旋转角度为±30°;气浮轴承摩擦力矩为<10-4Nm;转台可承载质量≥400kg。
探空火箭箭头姿态控制系统1∶1安装到气浮台转台悬臂的一端,另一端安装配重装置,以保持气浮转台的平衡。由于箭头姿态控制系统采用冷气推进器作为执行机构,在试验过程中,随着冷气推进器的工作,冷气推进器储气瓶的气体的减少会破坏气浮台的平衡状态,为此设计了双气瓶结构,2个气瓶分别安装到气浮转台悬臂两端,采用管路联通,这样冷气推进器在工作过程中,同时消耗2个气瓶中的气体,气浮台始终保持平衡,见图4所示。
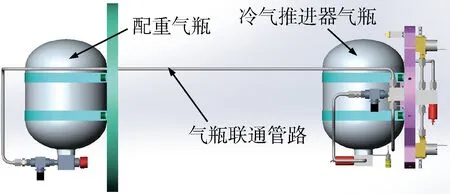
图4 三自由度气浮转台气瓶配平设计
供电模块负责为箭头姿态控制系统、数据管理单元和遥测单元进行供电。为了实现低成本设计,供电模块采用普通的锂电池,并经过适当设计,实现可控上、断电功能。
数据管理单元将箭头姿态控制系统物理仿真过程中的滚动角、俯仰角和偏航角数据和系统的监测数据进行统一管理后发送至数据遥测单元的WIFI-A端口处,如图2所示。
数据遥测单元利用无线WIFI设备实现地面仿真工控机与气浮转台上的箭头姿态控制系统进行数据通讯。遥测数据通过WIFI-A端口发送,WIFI-B端口进行接收,并通过有线方式传送至地面数据显示终端。
三自由度气浮转台受到台体的限制,其俯仰通道的活动控制只有30°,不能充分模拟箭头在飞行时的姿态运动(箭头在实际飞行时需要进行俯仰60°→-60°的姿态机动),为此,利用气浮转台的偏航运动通道模拟箭头的俯仰运动,这样可以充分对姿态机动控制环节进行有效仿真。
3 全物理仿真
3.1 控制算法
为了适应冷气推进器的开关特性和高精度指向控制要求,控制器应具有开关特性输出,并具有一定的阻尼特性,为此,控制器采用伪速率控制[7]。控制器结构见图5所示。

图5 伪速率控制器
伪速率控制器具有很好的稳定精度,且具有相位超前特性,可以为系统提供一定的阻尼特性。控制回路中,根据冷气推进器的最小控制脉冲宽度和控制精度等因素综合设计Km和Tm的值。伪速率控制器的最小控制脉冲宽度与其它参数的关系为
上式中,Ton为最小指令喷气时间;h为迟滞系数;ϑD为极限环宽度(极限环可以表征角度或者角速度)。
在控制律设计中,虽然伪速率控制器可以给系统带来一定的阻尼特性,但是阻尼较小,达不到设计要求,为此我们提出了一种改进的伪速率控制器[8],即在原伪速率控制器的前端增加一个PD形式的前馈网络,这样可以进一步增加系统阻尼,有效防止控制超调。改进的伪速率控制器如图6所示。
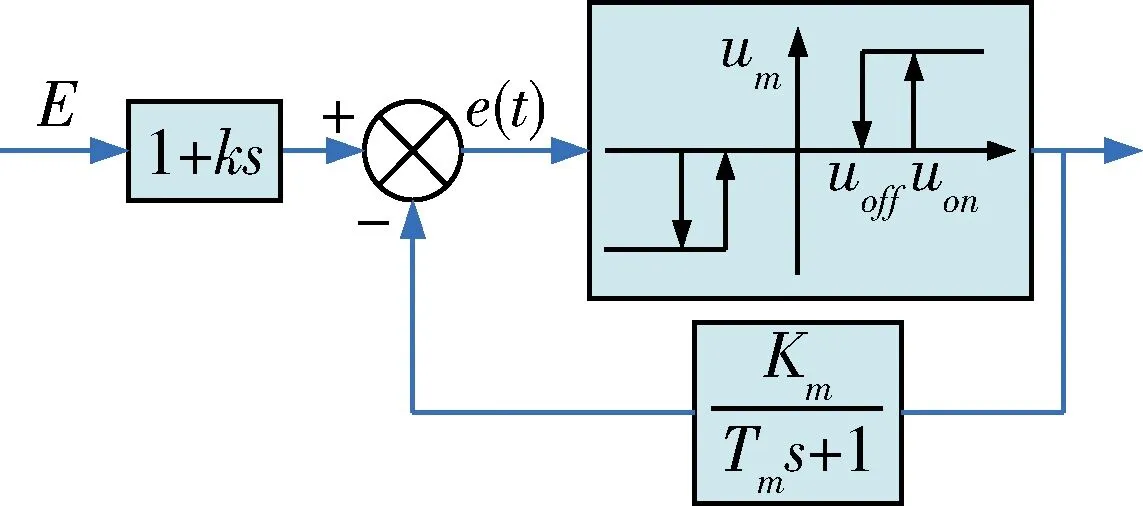
图6 一种改进的伪速率控制器
3.2 仿真测试
利用箭头姿态控制系统物理仿真转台对消旋、三轴稳定、姿态机动和轴向旋转4个控制模式进行测试,4个模式依次在一次物理仿真过程中实现,物理仿真系统的性能参数为:
姿态测量精度为0.6°;角速度测量精度为0.05(°)/s;测量频率为200Hz;控制频率为≤50Hz;控制精度为≤3°;
仿真的初始条件和控制目标为:
系统起控时间为41s;
4种控制模式时间分别为:
a)消旋控制模式:41s~61s;
b)三轴稳定控制模式:62s~270s;
c)姿态机动控制模式:271s~291s;
d)轴向(纵轴)旋转控制模式:>291s;
初始姿态参数:滚动角速度320(°)/s,偏航角50°;
三轴稳定控制目标:俯仰和滚动0°,偏航60°;
姿态机动开始时间为271s;
姿态机动通道及角度:偏航轴机动120°;
旋转通道及角速度:将滚动轴起旋至180(°)/s。
在物理仿真过程中,会在三轴分别施加一定的人工干扰,即在气浮台运行过程中,人为触碰气浮台旋臂,使箭头姿态快速偏离控制目标,以验证箭头姿态控制系统的抗干扰能力,箭头姿态控制系统物理仿真的控制效果如图7~12所示。
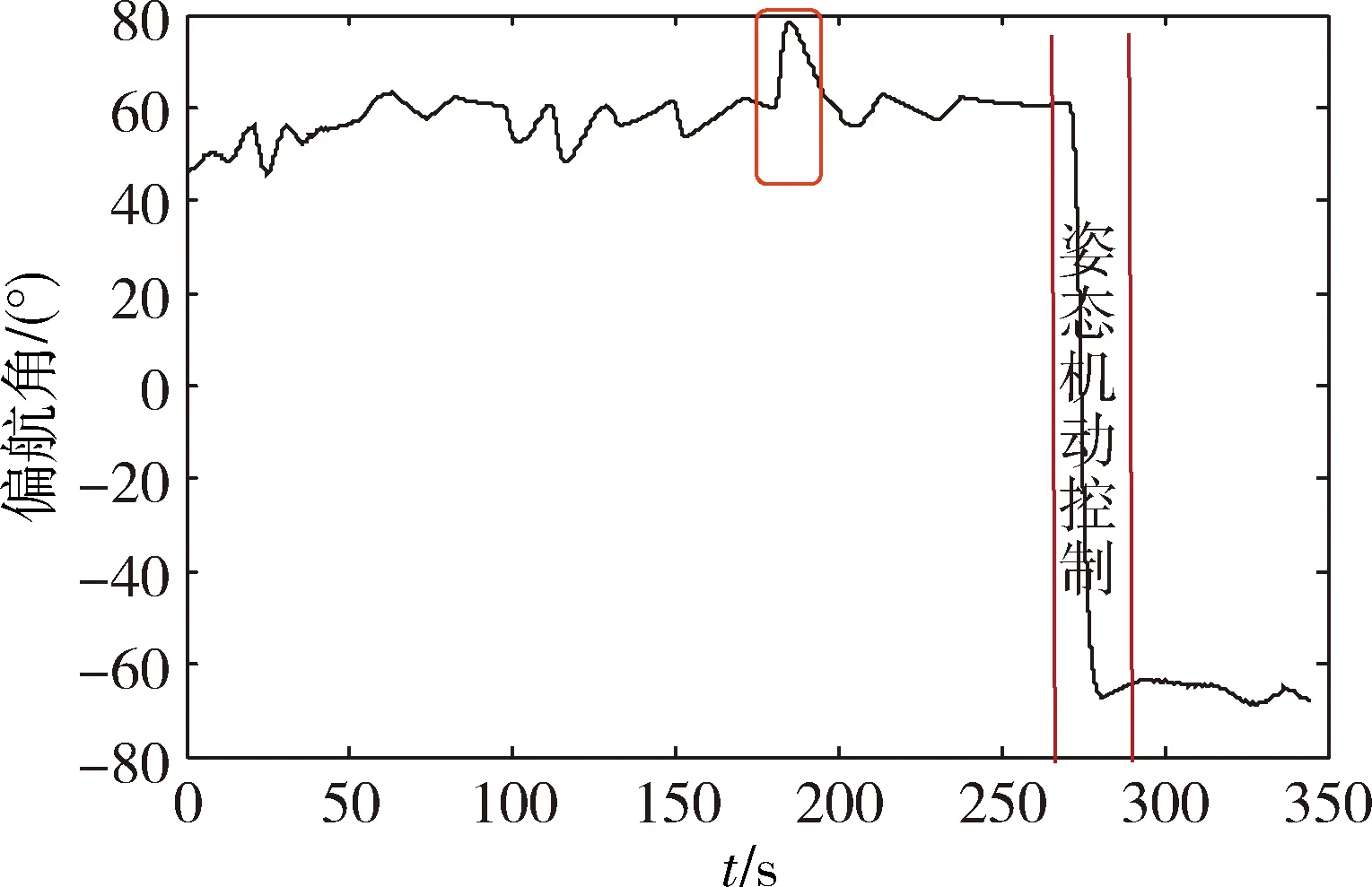
图7 偏航角控制响应
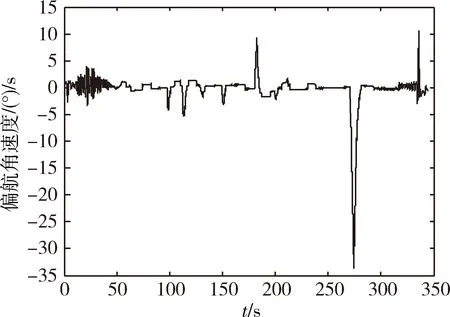
图8 偏航角速度控制响应

图9 俯仰角控制响应
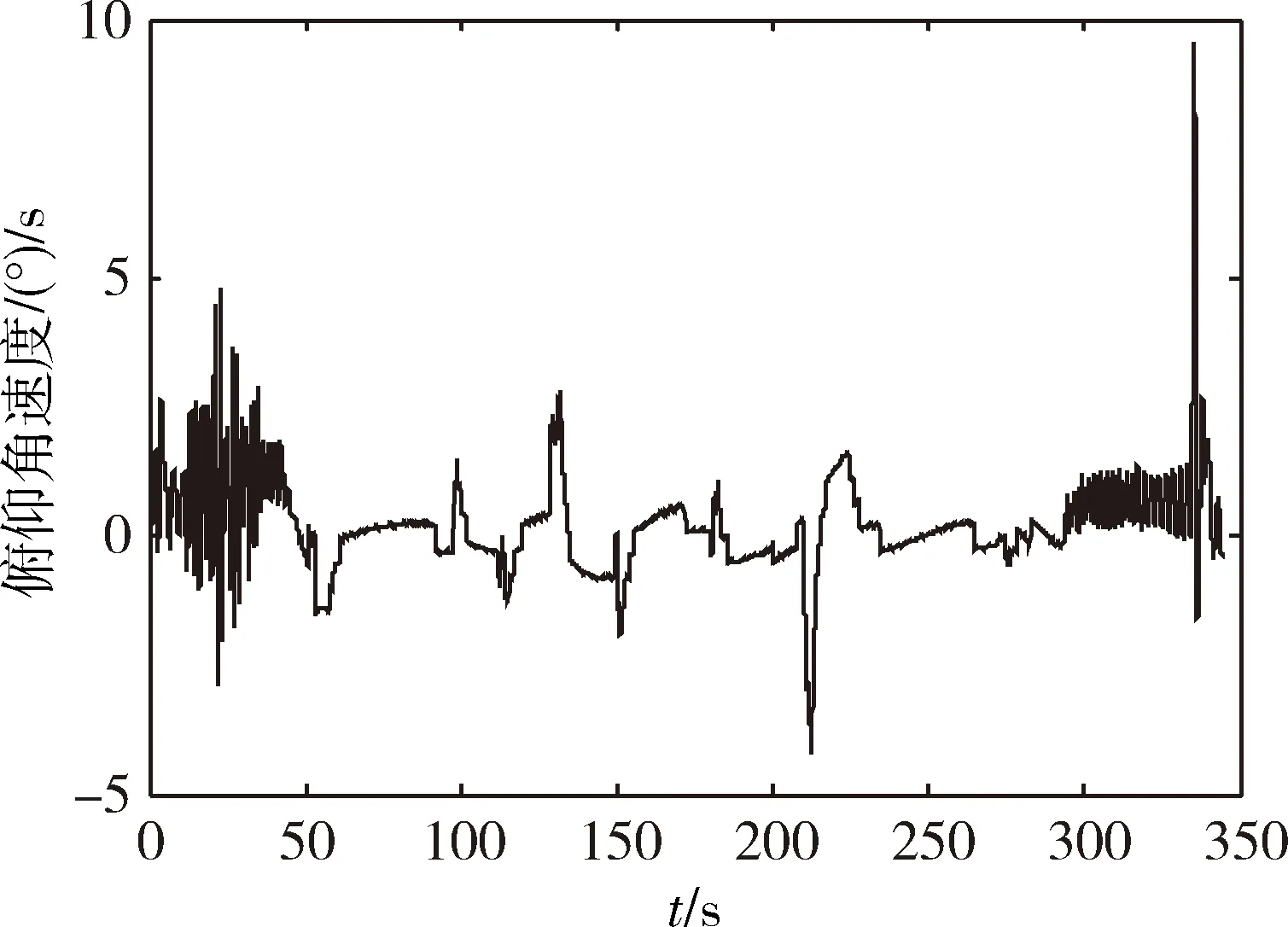
图10 俯仰角速度控制响应
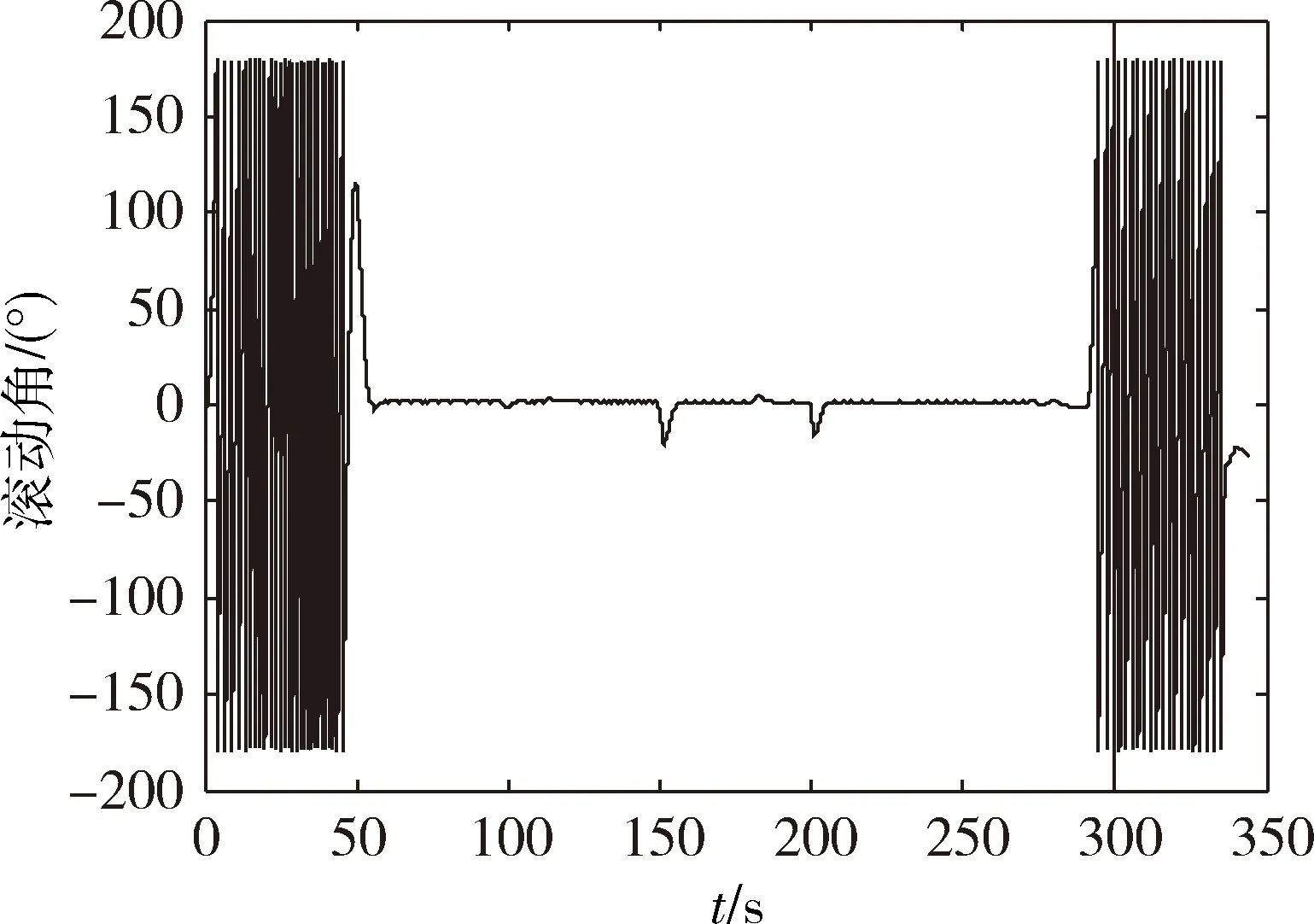
图11 滚动角控制响应
图12 滚动角速度控制响应
图7~12中,方框标记处为在三轴稳定控制模式中施加的人工干扰,从物理仿真曲线可以看出,在改进的伪速率控制作用下,姿态很快收敛到三轴稳定控制目标附近,说明箭头姿态控制系统具有一定的抗干扰能力。此外,从仿真曲线还可以看出,在4个控制模式顺序物理仿真过程中,模式切换灵活,每个控制模式控制稳定,箭头姿态均收敛到控制目标附近。
从物理仿真的过程看,双通道360°旋转空间的三自由度气浮转台能够充分仿真探空火箭的姿态运动与控制过程,有效支撑了探空火箭姿态控制系统的设计与实现。
4 结论
本文阐述了利用双通道360°旋转空间、悬臂梁式三自由度气浮转台构建探空火箭箭头姿态控制系统物理仿真系统,该系统可以逼真模拟箭头在飞行过程中的实际飞行动作,有效支撑了箭头姿态控制系统在地面的功能验证与性能测试,有效促进了探空火箭姿态控制技术的发展。
双通道360°旋转空间、悬臂梁式三自由度气浮转台可以为细长型、绕纵轴旋转类飞行器姿态控制系统提供很好的地面物理仿真环境,本文的研究成果对从事此类飞行器姿态控制技术研究、物理仿真研究有借鉴和应用价值。
参 考 文 献
[1] 姜秀杰,刘波,于世强等. 探空火箭的发展现状及趋势[J]. 科技导报, 2009, 27(23):101-110.(Jiang Xiujie, Liu Bo, Yu Shiqiang, et al. Development Status and Trend of Sounding Rocket [J]. Science & Technology Review, 2009, 27(23): 101-110.)
[2] 卞春江、刘成、高东等. “鲲鹏1B”探空火箭箭头平台系统[C]. 第二十九届全国空间探测学术研讨会,拉萨,中国,2016.(Bian Chunjiang, Liu Cheng, Gao Dong, et al. The Payload Servicesystem of Kunpeng-1B Sounding Rocket[C]//29rd National Symposium on Space Exploration, Lhasa, China, 2016.)
[3] 高华宇,董云峰. 基于气浮台的小卫星姿态控制全物理仿真实验系统[J]. 计算机测量与控制,2009,17(6):1153-1156.(Gao Huayu, Dong Yunfeng. Full- Physical Simulation Experiment System of Moonlet Attitude Control Based on Air Bearing Test-bed[J]. Computer Measurement & Control, 2009,17(6):1153-1156.)
[4] 李季苏,牟小刚,等. 气浮台在卫星控制系统仿真中的应用[J]. 航天控制,2008,26(5):64-68.(Li Jisu, Mu Xiaogang, et.al. Application of Air Bearing Table in Satellite Control System Simulation[J]. Aerospace Control, 2008,26(5):64-68.)
[5] 李季苏,牟小刚,张锦江. 卫星控制系统全物理仿真[J]. 航天控制,2004,22(2):37-45.(Li Jisu, Mu Xiaogang, Zhang Jinjiang. Physical Simulation for Satellite Control Systems[J]. Aerospace Control, 2004,22(2):37-45.)
[6] Agrawal B N, Rasmussen R E. Air-bearing-based Satellite Attitude Dynamics Simulator for Control Software Research and Development[C]. Aerospace/Defense Sensing, Simulation, and Control. International Society for Optics and Photonics, 2001:204-214.
[7] 屠善澄. 卫星姿态动力学与控制[M]. 宇航出版社,1998.
[8] Han Peng, Gao Dong, Li Yanli, Mao Bonian. ‘Kunpeng-1B’ Sounding Rocket’s Attitude Control Algorithm Using An Improved Pseudo Rate Modulator[J]. Journal of Beijing Institute of Technology (English Edition), 2016,25(4):21-25.
[9] 鲁兴举. 空间飞行器姿态控制仿真试验平台系统研究与设计[D].国防科学技术大学研究生院,2005,11.(Lu Xingju. Research and Design of a Spacecraft Altitude Control Simulator System[D]. Graduate School of National University of Defense Technology,2005,11.)
[10] 张世杰,曹喜滨,王峰. 微小卫星姿态控制系统半物理仿真设计及验证[J]. 中国空间科学技术,2005,25(6):43-50.(Zhang Shijie, Cao Xibin, Wang Feng. Design of Semi-physical System for Micro-satellite Attitude Control[J]. Chinese Space Science and Technology, 2005,25(6):43-50.)
