基于自适应滑模观测器的风机齿轮箱故障估计
2018-05-16文传博
章 敏, 文传博
(上海电机学院 电气学院, 上海 201306)
随着风电技术的提高以及世界各国对风力发电采取的一系列鼓励政策,使得世界范围内的风电装机容量逐年增大[1]。但是随着风机的不断运行,它的故障率也逐渐增加[2-3]。齿轮箱作为风电机组传动系统的执行元件,其发生故障会导致传动系统不能稳定工作,从而影响风机的正常运行。故障估计不仅能够检测出部件是否发生故障,并且还能够诊断出产生故障的形式,便于故障维修。
目前,基于滑模观测器的故障估计研究内容较多且较丰富。文献[4]中针对一类Lipschitz非线性系统的执行器故障估计问题,提出了一种基于二阶滑模观测器的故障估计方法。文献[5]中针对一类不确定非线性系统的传感器故障估计问题,将传感器故障相量转化为仅存在执行器故障和未知输入的增广广义系统,针对所构造的奇异系统,设计了一种鲁棒滑模观测器来估计原系统的传感器故障。文献[6]中针对一类线性不确定时变时滞系统,设计了一种新的滑模观测器,并在此基础上,提出了一种鲁棒执行器故障估计方法。文献[7]中针对系统存在多故障的情况,利用自适应滑模观测器实现故障估计。文献[8]中提出了一种广义滑模观测器,并利用等效注入的方法实现故障估计。文献[9]中则分析了将滑模观测器应用到风力发电系统的执行器的故障估计问题。Tan等[10]针对系统的执行器存在缓变故障的问题,提出了一种故障估计方法,但并没有充分考虑到系统存在未知干扰的情况。由于滑模变结构对扰动具有很强的鲁棒性[11],故本文将滑模观测器与文献[10]中提出的自适应估计算法相结合构成自适应滑模观测器,用于实现传动系统的齿轮箱故障估计。最后,通过仿真表明利用该方法实现齿轮箱的故障估计的鲁棒性更好。
1 风电机组传动系统的建模
1.1 叶轮模型
根据贝兹理论,得叶轮所吸收的风能功率[12]为
(1)
式中:ρ为空气密度;V为实际风速曲线;R为叶轮半径;Cp(λ,β)为叶轮的功率系数,表示叶轮捕获风能的特性,它与桨距角β和叶尖速比λ有关。
风轮机的叶尖速比λ与叶轮转子角速度ω以及风速有关,其表达式为
λ=Rω/V
(2)
由式(1)和式(2)得叶轮的气动转矩为
(3)
由气动转矩表达式可知,传动系统的输入转矩Tr随外界风速而变化,而外界风速极不稳定,因此Tr具有很强的不确定性。
1.2 传动系统轴系模型
传动系统轴系模型一般分为刚性轴模型和柔性轴模型[13],本文选用最常用的刚性轴模型为研究对象,刚性轴模型认为由低速轴向高速轴传递的过程,是按照齿轮箱的传动比传动。刚性轴模型的受力如图1所示,将低速轴和高速轴看成为两个质量块,且它们与齿轮箱之间的转动惯量忽略不计。

图1 刚性轴模型的受力示意图
传动系统实际上可看成输入为叶轮的气动转矩Tr,输出为发电机电磁转矩Te。根据图1模型,可建立动力学方程
Tr-NTe=(Jr+NJg)(ωg/N)
(4)
式中:N为齿轮箱传动比;Jr为叶轮转子转动惯量;ωg为电机转速;Jg为高速轴转动惯量。
1.3 发电机模型
发电机模型是建立传动系统模型的重要一环,发电机的动态方程反映的是转矩与转速之间的关系,通过它们的关系方程再与传动轴方程联立求解即可得出传动系统的数学模型。本文研究的风机为恒速风力发电机,其特点是叶轮转速保持恒定,具有维护少、直接并网等特点。恒速风力机选用的发电机一般为恒速感应式发电机,该发电机的电磁转矩不仅与转速有关,还与转速的变化率有关,它们之间的关系可以表示为
(5)
式中:De为发电机Te与ωg曲线图的斜率;τ为发电机的时间常数;ω0为同步转速。
1.4 传动系统的状态空间模型
对式(5)进行二次求导后代入式(4),再经Laplace变换后,可得传动系统的传递函数为

(6)
将式(6)转化成状态空间模型时应考虑建模误差及未知输入的影响,因此,传动系统的状态空间模型为:
(7)

2 齿轮箱的故障估计
齿轮箱作为传动系统的内部部件,当齿轮箱产生故障时,传动系统的状态空间模型变为
(8)
式中:fa(t)为齿轮箱故障信号;E为故障分布矩阵。
针对传动系统式(8),现作如下假设:
假设1系统是可观的,则存在反馈矩阵L∈R2×1,使得A0=A-LC的特征根均具有负实部。

假设3存在矩阵F,使得PD=CTFT。


基于假设1~5,设计自适应滑模观测器如下:
(9)

(10)
式中:β为正常数;F满足假设3;δ是标量非常小的常数,设计δ的目的是为了避免系统发生抖振现象[14]。
滑模控制律用来抑制扰动的影响,使得残差只包含故障的信息,根据残差信号可设计故障估计自适应律算法,其表达式为[10]
(11)
式中:E0为待设计的适维矩阵,满足假设5。
(12)

证明选取Lyapunov函数


因此,通过以上滑模观测器的设计以及故障估计算法可以有效地实现齿轮箱的故障估计。传动系统齿轮箱的故障估计设计如图2所示。

图2 齿轮箱故障估计的设计框图
3 仿真分析
某300 kW风力发电机的各项参数[15]见表1。

表1 300 kW风力发电机仿真参数
将上述参数代入传动系统方程得系数矩阵:

由矩阵A和C知系统是可观的,故将观测器的两个极点都配置在-10。通过计算得反馈矩阵
针对齿轮箱齿面磨损引起的漂移故障,分别设计自适应观测器和自适应滑模观测器进行故障估计,验证后者的估计效果更好,设计故障表达式为:
(13)
自适应观测器与自适应滑模观测器相比,少了滑模控制律函数,针对传动系统,设计自适应观测器如下:
(14)

设计实验的各项参数为:

基于自适应观测器的齿轮箱漂移故障估计及估计误差分别如图3和图4所示。基于自适应滑模观测器的漂移故障估计及估计误差分别如图5和图6所示。

图3 基于自适应观测器的齿轮箱漂移故障估计
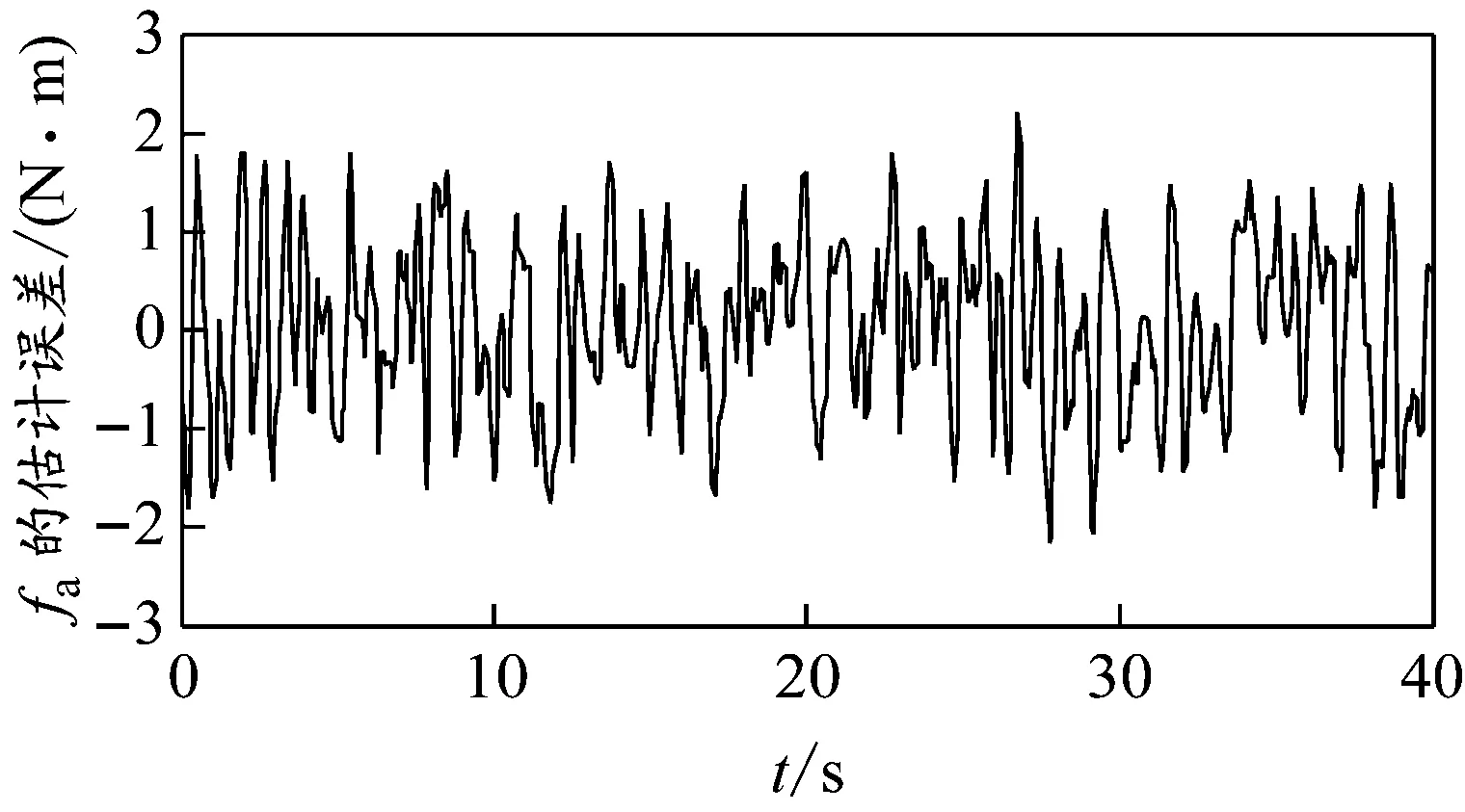
图4 基于自适应观测器的齿轮箱漂移故障估计误差
通过仿真图3和图5可以看出,两者均能大致地估计出故障的状态,从而说明所设计的故障估计算法的有效性。从图4和图6可以看出,基于自适应滑模观测器的故障估计精度要高,说明针对存在扰动和齿轮箱故障的传动系统,利用自适应滑模观测器实现齿轮箱故障估计的鲁棒性更好。

图5 基于自适应滑模观测器的齿轮箱漂移故障估计

图6 基于自适应滑模观测器的齿轮箱漂移故障估计误差
4 结 语
本文针对有扰动和齿轮箱故障的风电机组传动系统,提出了一种基于自适应滑模观测器的故障估计方法。首先建立了传动系统的数学模型,由于建模误差及未知输入的影响,因此系统受到未知输入扰动的干扰。然后针对含有扰动和齿轮箱故障的系统模型,设计一类自适应滑模观测器用来实现齿轮箱的故障估计,利用李雅普诺夫稳定性原理证明了故障估计方法的正确性。最后分别对基于自适应观测器和自适应滑模观测器的两种故障估计方法进行仿真,仿真结果表明,针对有扰动的传动系统,本文提出的故障估计方法的鲁棒性更好。
参考文献
[1] JAUCH C, SORENSEN P, NORHEIM I, et al. Simulation of the impact of wind power on the transient fault behavior of the Nordic power system[J].Electric Power Systems Research,2007,77(2):135-144.
[2] RIBRANT J, BERTLING L M. Survey of failures in wind power systems with focus on swedish wind power plants during 1997—2005[J].IEEE Transactions on Energy Conversion, 2007,22(1):167-173.
[3] 张镇,关书强.风电机组故障统计分析研究[J].风能,2013(8):74-77.
[4] HU Zhenggao,ZHAO Guorong,ZHANG Lei,et al. Fault estimation for nonlinear dynamic system based on the second-order sliding mode observer[J]. Circuits Systems and Signal Processing,2016,35(1):101-115.
[5] YANG Junqi,ZHU Fanglai,WANG Xin,et al. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems[J]. International Journal of Control, Automation and Systems,2015,13(5):1037-1046.
[6] BOULAABI I,SELLAMI A.Robust delay-derivative-dependent sliding mode observer for fault reconstruction: a diesel engine system application[J]. Birkhauser Boston Inc.,2016,35(7):2351-2372.
[7] 刘聪,李颖晖,吴辰,等.基于鲁棒自适应滑模观测器的多故障重构[J].控制与决策,2016,31(7):1219-1224.
[8] 穆凌霞,余翔,李平,等.自适应广义滑模观测器之状态估计和故障重构[J].控制理论与应用,2017,34(4):483-490.
[9] 沈艳霞,贺庆楠,杨雄飞,等.风能转换系统执行器故障重构与容错控制[J].控制理论与应用,2015,32(12):1698-1704.
[10] TAN C P, EDWARDS C. Sliding mode observers for detection and reconstruction of sensor faults[J].Automatica,2002, 38(10):1815-1821.
[11] 李卓,卢子广.基于滑模观测器的异步电机无速度传感器控制[J].电气传动,2016,46(7):12-15.
[12] 高峰,徐大平,吕跃刚.基于叶素理论的风力发电机组风轮建模[J].现代电力,2007,24(6):52-57.
[13] MUYEEN S M,ALI M H,TAKAHASHI R,et al. Comparative study on transient stability analysis of wind turbine generator system using different drive train models[J].Renewable Power Generation Let,2007,1(2):131-141.
[14] UTKIN V I. Sliding modes in control and optimization[J].Springer Berlin Heidelberg, 1992,189(3):1372-1379.
[15] 刘豹.风力发电机传动装置建模分析[D].沈阳:东北大学, 2012.
