新海凤推进控制系统原理及维修
2018-05-09张栋成
张栋成
(中港疏浚有限公司,上海200136)
0 引言
船舶前进的动力由主机燃烧柴油将热能转换为机械能通过推进器转化而来,人员操作推进器实现船舶离靠泊码头、机动航行,而推进器的操纵离不开控制系统的作用。瓦锡兰是世界著名的柴油机生产制造商,新海凤轮采用瓦锡兰16V38B型四冲程柴油机作为主要动力装置,通过带推进离合器的变速齿轮箱拖带艉轴 CPP和轴带发电机,通过带泥泵离合器的减速齿轮箱拖带泥泵。推进控制系统采用瓦锡兰Lipstrnoic7000,实现管理人员对推进器的操作,同时实现主机、MSB/PMS、泥泵控制系统、VDR、AMS与推进控制系统之间的联动与通讯,如图1所示。只有理解了Lips7000的基本原理,才能在出现故障时,快速有效地解决问题,保障船舶安全航行。
1 Lipstronic7000的系统原理
Lipstronic7000系统旨在控制 CPP螺距角度和CPP响应速度的设定[1]。实际在新海凤轮,Lips还兼顾主机调速和控制,泥泵合排与脱排控制。
1.1 螺距角度控制
新海凤轮 CPP的螺距控制分为:Backup control、Local control和 Remote control。
1.1.1 Backup control
遥控 NFU(非随动模式),通过开关量触点或HMI与Backup PLC RS232通信方式,将信号传递给Backup PLC,Backup PLC 输出直接作用在相应的电磁阀上。由于Backup control不受任何负载限制控制,亦不受螺距反馈作用,所以控制螺距精度不高,且优先级低于 Local control,用于遥控系统发生重大故障时的备用控制,原理见图2。Backup control激活方式可分为人为操作和自动激活,激活需要控制权在ECS或BCS。
人为操作:如图 2所示,右侧 BRIDGE GROUP驾驶台中央航行控制台上和侧翼控制台上BACKUP CONTROL按钮激活, 左侧BRIDGE GROUP的Ahead和Astern按钮操作CPP。ECS机舱HMI人机界面F8 NFU凭借密码进入相关操作界面激活,通过HMI上的按键F5、F6操作CPP。
自动激活条件:如图2左下角所示,当MAIN PLC故障,或遥控系统发生重大故障,例如控制中的螺距信号丢失、螺距反馈信号丢失,MAIN PLC失电,Lips会发出声光报警,提示操作人员推进系统重大故障并确认Backup control。
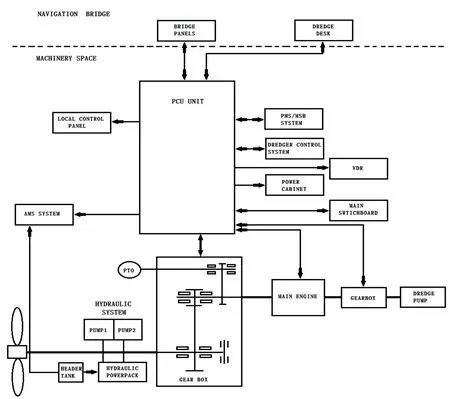
图1 Lipstronic7000系统框图
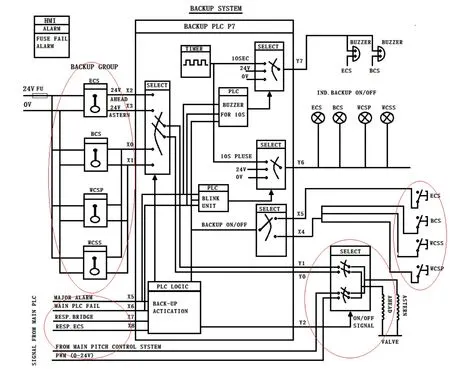
图2 Backup control原理框图
1.1.2 Local control
NFU非随动模式、应急操作,为机侧控制箱控制,优先级最高。通过机侧控制箱上开关量的触点动作输入至PCU控制柜Backup PLC,Backup PLC输出单独作用在相应的电磁阀上,控制是非闭环的,不受螺距反馈的控制,亦不受遥控系统的负荷程序等设定限制,角度无法精确控制。如图3所示。
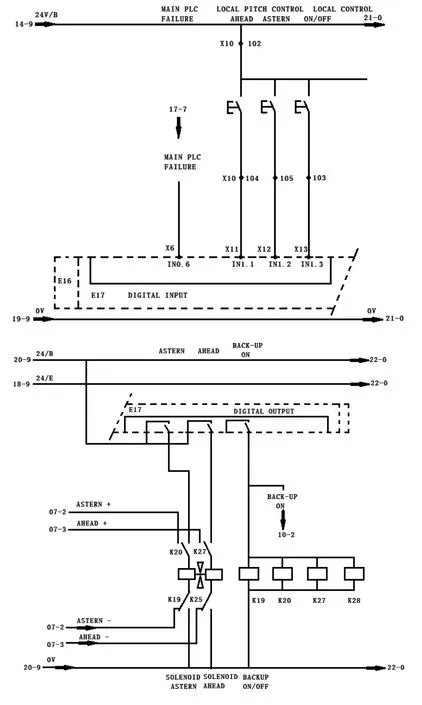
图3 Local control原理图
1.1.3 Remote control
Remote control由 PCU柜内 MAIN PLC 按照设定程序,配合安装在主机的油门齿条传感器、速度传感器,各控制台螺距信号发生器,螺距信号反馈发生器,CPP执行器和电磁阀完成,螺距的控制是闭环的。如图4所示,螺距信号PITCH ORDER由操纵杆给出并经过加速度限制器,螺距负反馈FEEDBACK由反馈电位器给出,MAIN PLC将模拟量螺距信号和螺距反馈通过A/D转换,形成数字量偏差信号,经图5曲线选择相应值。同时依据主机油门齿条和转速信号,实时负荷计算产生的数值,按图6负荷限制曲线产生数值。最后将图5和图6产生数值对比。若选择负载限制,则经过最小信号选择器LSS选择最小控制信号;若取消负载限制,则经过最大信号选择器HSS选择最大信号。最后经过D/A转换输出至执行器,执行器产生最佳PWM信号驱动电磁阀做出准确的动作,CPP角度可以准确达到预期角度。
1.2 响应速度控制
由图 4、图 5、图 6分析可知,CPP的响应速度控制是一个多信号比较选择的结果。
1.2.1 图5分析
图5为位置速度曲线,横轴代表信号偏差(螺距指令与反馈),纵轴代表响应速度,Treshold区域代表即将达到预期桨角降速区,虚线部分代表滞环。起初偏差信号为 0,人为操纵车钟产生偏差信号,若信号偏差小于outer db响应死区外界限时,响应速度为0;偏差较大超过outerdb,则响应速度按照上述曲线比例给出响应速度;若信号偏差大于降速区域时,响应速度按照设定最大速度;随着CPP动作,信号偏差逐渐减小,当实际桨角即将到达期望位置时,即进入Treshold区域,CPP按照曲线比例降速,直至偏差小于inner db响应死区内界限,响应速度降为0。此曲线意在设定 CPP即将达到期望角度时的响应速度的变化,Treshold点为即将进入预期角度点。
1.2.2 图 6分析
图6为负载速度曲线,横轴代表主机实时负荷,纵轴代表响应速度,100%以下曲线代表负载速度曲线,100%以上代表过载速度曲线。
负载曲线分析:当主机负荷较低,低于a点时,响应速度按照设定最大速度;若不存在减负荷区域,则 b点与 c点重合,响应速度按照 a-c的K曲线响应,c点、d点之间为滞环;若引入减负荷区(b点至100%),当主机负荷位于a与b点之间时,响应速度按照a-b的K曲线响应,当主机负荷进入减负荷区域,速度降为最小,主机负荷超过d点后,响应速度降为0,仅当主机负荷再次低于 b点,再给出响应速度,b点、d点之间为滞环;若主机负荷在d和e之间,响应速度为0;当主机负荷在b(c)和d之间时,响应速度由上一扫描状态决定,或为设定最小或为0,因此减负荷区意在降低恶劣工况、主机高负荷情况下CPP的小角度频繁动作。
过载曲线分析:当主机负荷超过 100%,则采取过载曲线设定。当主机过载,超过e点后,响应速度将设为负的最小;直至超过f点之后,将按照过载K曲线设定;超过g点后,将按照负的最大速度。以此来实现主机过载时,自动降螺距减负荷[2]。
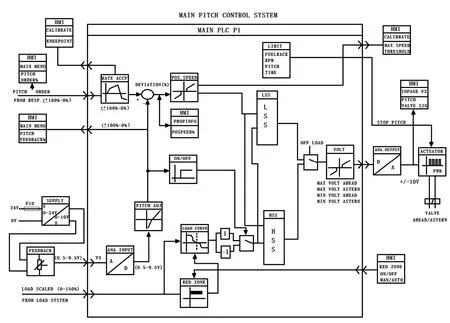
图4 Remote control原理图

图5 位置速度曲线图
1.3 LIPSTRONIC 7000 的其他接口
1.3.1 主机的起停、调速和负荷限制
Lips系统负责主机的遥控启动、停止、应急停止和调速,并且负责遥控位置之间的相互转移和确认。启动、安保停车连锁条件是否满足由主机自身主控模块MCM700b决定,并将ready for start、engine shut down 等信号反馈给遥控系统。与齿轮箱相关的安保停车由Lips决定。主机转速、负荷,CPP转速,螺距角度等信息可以在PCU控制柜上获得。
主机调速:若Lips主PLC发生故障,则主机转速由 Lips备用主机转速信号发生器控制转速在100%;主PLC正常工作,则根据的推进模式决定主机转速,并产生相应的四种二进制动态参数输送至723调速器。推进模式分为:定速模式,疏浚模式,推进离合器脱开模式。定速模式Lips使得主机转速恒定在97%-100%,与CPP螺距角度无关。疏浚模式下,主机转速可由疏浚台主机速度控制旋钮 85%-100%、PCU控制柜上85%、100%按钮控制。推进离合器脱开发电机断路器合闸情况下,主机转速调整允许在 85%- 100%,信号来自MSB/PMS PLC给出的开关量信号、PCU柜按钮和疏浚台转速旋钮。推进离合器脱开发电机断路器未合闸情况下,主机转速可由PCU控制柜上60%、85%、100%、increase、decrease按钮,从怠速 60%到全速 100%可调。所有信号经过LIPS主PLC计算,主PLC发出均匀变化的4~20mA信号至723调速器,实现对应指令的对应速度。
主机负荷控制:Lips根据自身load calculation system判断控制和接受 PMS临时降螺距信号调节(1.3.3介绍)。自身系统根据主机油门齿条传感器、转速传感器信号判断,当主机负荷没有达到 100%的时候,螺距按负荷曲线和位置速度曲线综合调节;当主机负荷超过100%,将按照图6过载曲线,自动降低螺距,防止主机进一步过载。无论何时发生推进齿轮箱伺服油压力低推进系统请求减负荷,主机滑油温度高、排温高等主机请求减负荷,AMS请求减负荷,Lips都会发出声光报警,提示操作人员降低螺距。
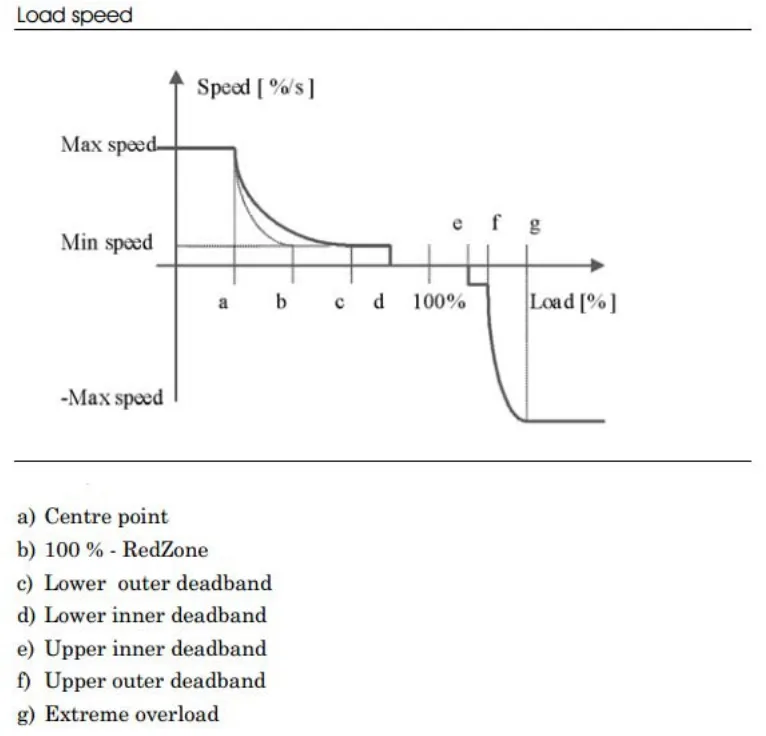
图6 负载速度曲线图
1.3.2 泥泵的控制
Lips控制泥泵可分为集控室控制和疏浚台控制。控制泥泵合排、脱排的条件分别来自泥泵齿轮箱、离合器、艉液压 PLC和 PMS,并在疏浚控制系统中呈现条件是否满足。合排、脱排控制信号来自相应的控制位置,合排、脱排、安全脱排动作由Lips发出,并给出灯光指示。
1.3.3 PMS/MSB
Lips激活NFU模式,PMS将不起作用,需要人为去降低螺距以降低主机负荷。
PMS即功率管理系统,MSB即主配电板系统,新海凤轮的PMS系统用于防止主机和发电机过载并采取相应的措施。防止主机过载的主要措施就是PMS降低CPP螺距,仅当Lips控制模式选择 FU,PMS降螺距信号才起作用。例如泥泵离合器合排、侧推的启动(发电机功率充足而主机功率不足)等,各系统会向PMS发出启动请求,此时PMS会检测主机功率是否足够,功率不足则通过Lips降低螺距调整主机功率,最后给予启动允许或不予启动反馈。
PMS负责轴带发电机同步和配电模式转换,PMS会向 Lips发出同步请求,当轴带发电机同步条件(主机转速≥97%且泥泵离合器脱开)满足时,Lips将主机转速调整在 97%-100%,反馈至PMS同步允许,之后开始接收来自MSB PLC的加减速信号控制。直至PMS同步请求消失即:发电机断路器合闸信号反馈至Lips或同步超时,主机转速控制权转移至Lips,轴发同步成功之后主机调速范围允许在85%-100%[3]。
1.3.4 VDR
Lips将重要数据传输给VDR保存。模拟量:螺距指令,螺距反馈、主机转速给定、螺旋桨转速;开关量:重大故障、驾驶台控制中。
1.3.4 AMS
Lips给出RS485信号,经过CS6型CAN数据处理器转换为RS232信号,将gearbox相关传感器的参数传递给AMS。Lips还输出以下开关量主要报警点至AMS:推进系统重大项目报警、推进系统一般项目报警、离合器报警、推进系统降负荷报警、轴锁装置激活报警、调速器重大项目报警、调速器一般项目报警。以上参数用来监视和报警。
AMS 发送 load reduction request至 Lips,提示操作人员降低螺距。
2 预见性的维护
2.1 每日
所有控制面板的指示灯测试;检查各复示器显示是否正常;检查控制系统是否有报警(AMS触点报警或HMI报警)。
2.2 每周
检查控制柜的主要电源电压和后备电源电压是否为标称 24 VDC;检查所有控制站的备用控制功能,检查主机备用速度控制模块是否正常,检查各控制站之间的控制切换;检查所有模式下每个控制站对CPP的操作。
2.3 5 年
为了防止MAIN PLC内部数据丢失,5年左右更换控制柜内PLC中的内部充电电池,更换时确保保持PLC电源打开,否则程序将丢失。
3 故障及排查
3.1 CPP桨角显示一侧无穷大
1)显示故障
由于CPP桨角指示器是由MAIN PLC的模拟量输出模块给出4-20 mA电流驱动表头,因此所有表头串联在一起,任意一个故障或者线路不通就会出现偏向一侧无穷大。
2)主机高负荷甚至过载,实际桨角与显示相同
CPP选择FU模式情况下,正、倒车电磁阀由PAM-195P执行器产生的PWM信号控制,因此利用Local control排除机械故障情况下,则需要检查执行器和MAIN PLC的模拟量输出模块是否存在故障,新海凤轮曾经因为PLC模拟量输出模块故障导致CPP正车电磁阀一直得电,进而导致主机过载。
3.2 主机实际速度与指令设定速度差异较大
主机的转速由伍德沃德 723电子调速器控制,控制信号来自LIPS给出的4-20 mA电流和两个动态开关量输入,双速度探头作为反馈,同时综合主机油门齿条传感器和增压空气压力传感器的信号,经过逻辑判断,输出180-10 mA电流控制机械调速器[4]。因此,主机转速故障需要综合速度探头信号,LIPS的转速给定信号,输出至机械调速器信号多方面综合判断。新海凤轮曾出现主机实际转速偏低故障,具体原因为 LIPS的转速给定信号由于 PLC模块故障导致给定信号偏低。
3.3 遥控无螺距响应或与指令不匹配
1)检查LIPS是否发出报警(应急电源故障、重大故障等)。
2)检查是否选择按钮控制(Backup control或者 Local control)。
3)检查螺距指示功能是否正常,观察机侧螺距机械刻度。
4)检查液压泵是否正常运行,并检查液压压力是否正常。
5)检查阀驱动器(PAM 模块)功能是否正常,并检查电磁阀线圈是否存在断线。
6)检查应急停止条件是否激活。
7)检查负载控制是否激活,并由此减小螺距。
8)检查螺距反馈传感器信号和指令发送器信号是否正常。
参考文献:
[1]Wärtsilä. Remote Control System Transverse Thruster Class IIL IPSTRONIC 7000TTb[M]. Shanghai: [s.n.]: 2016: 4-6, 25-30, 45.
[2]Wärtsilä. Lipstronic 7000 CPP Basic no. 00368M1C11[M]. [S.I.]: [s.n.]: 2008: 32-37.
[3]Olsthoorn G.P.A.M. PMS Functional Specification V4. IMTECH[M]. Netherlands:[s.n.]: 2011: 23-30, 74-92.
[4]Wärtsilä. Installation Planning Instructions for GWS 349 Main Engines: 1 x Wärtsilä 16V38,1 x Wärtsilä 16V38[M]. Guangzhou:[s.n.]: 2008: 277.