康复机器人在平衡训练中的应用现状及优化方案
2018-05-07韦宇炜何梓秋何汉武王俊华曾科学
韦宇炜,何梓秋,何汉武,王俊华,曾科学
(1.广东工业大学,广东 广州 510006;2.广东省第二中医院,广东 广州 510095)
0 引言
脑卒中传统的康复治疗分为急性期的康复治疗和恢复期的康复治疗。恢复期的康复治疗按照顺序分为:床上训练、坐起及座位平衡训练、从座位到站起训练、站立及站立平衡训练、步行训练、上肢及手功能训练、作业治疗训练等。其中,平衡训练占有非常重要的地位。平衡能力作为行走功能的基础,对于患者的站立行走康复有极大的帮助,是康复治疗中极其重要的一环。
对于平衡康复的训练,一种方法是通过单独训练患者的平衡能力,使患者在无平衡能力状态下逐步实现静态平衡,进而实现自动态平衡和他动态平衡,此种设备的评估参数主要为平衡能力参数,在患者达到平衡能力要求后可能还需要进一步对步态进行训练。另外一种方法则主要体现在下肢训练方面,使患者在下肢康复的过程中逐步掌握平衡的能力和技巧[1],达到平衡与行走同步进行的效果,训练效率较高。
本文通过介绍目前市面上的几种较先进的下肢康复训练机器人,分析目前下肢康复机器人在平衡康复训练中所存在的不足。以消除目前所存在的不足为目标,设计出一套优化方案,使下肢康复机器人运用于平衡康复训练时更加具有通用性和有效性。
1 平衡康复训练机器人的研究的现状
康复机器人的研究真正起步于20世纪80年代,到90年代得到了全面的发展。美国、英国、日本、德国等国家在康复训练机器人领域有着最领先的研究,而我国研究工作起步较晚,现处在初步发展阶段,不过目前清华大学、上海交通大学、复旦大学、哈尔滨工业大学等多家大学已经开展关于康复训练机器人的研究[2]。下文将介绍几种较典型的用于平衡康复训练的机器人。
Betec公司生产了一种Bertec's Balance Check TM系统平衡台,如图1所示,可以用于平衡失调病人康复训练以及运动员训练以提高自身竞技水平,该平衡板可以测量垂直方向的力和中心压强(CoP)。设备可以像地毯一样铺在地板上,易于操作和使用,适用于身体姿态控制和其它人体平衡研究。Bertec平衡板可单独使用或作为BalanceCheckTM系统的一部分使用。设备采用16-bit数字技术,通过USB数据线与安装有数据采集软件的计算机相连。可以用此设备作为一种研究工具,获取相应信息。

图1 Betec测力训练平台
德国生产的MEDICA主被动站立步行训练系统BALANCE-Trainer可为病人提供部分或完全的静态站立及安全的动态站立训练,可根据病人情况调整训练强度,基于随机的训练软件,最大程度的激发病人潜在的站立,平衡及认知功能,如图2所示。此系统具有七级可调的训练强度和倾斜角度可调整的作业台,能够进行静态站立、动态站立、稳定性训练三种训练模式,同时具有相应的站立稳定性评估训练软件,通过位移感应器可动态测量站立稳定性及躯干倾斜角度,给予评估结果。
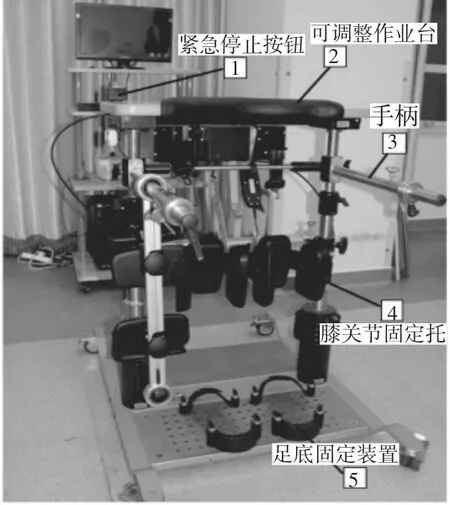
图2 MEDICA测力训练平台
瑞士Kistier公司生产了一种测力平台,如图3所示。其便携式铝制板面用于测量地面反作用力、力矩以及压力中心等生物力学指标。此测力台主要在步态、平衡分析以及技术动作诊断和训练监控中使用。它内置放大器产品,可以与所有常用运动学、生物学(肌电)采集分析系统同步使用。另外,此测力台有较宽的量程(0~10kN),但其在整个应用范围仍具有高精度和高线性度。另外,其具有对静态负荷高达12 kN的超载保护保障。由于压电式传感器的特殊性能,测力台具有很高的灵敏度,可以在测量较大量程同时测量微小的动态现象,在大量程时可以精确地测量到微小的力。
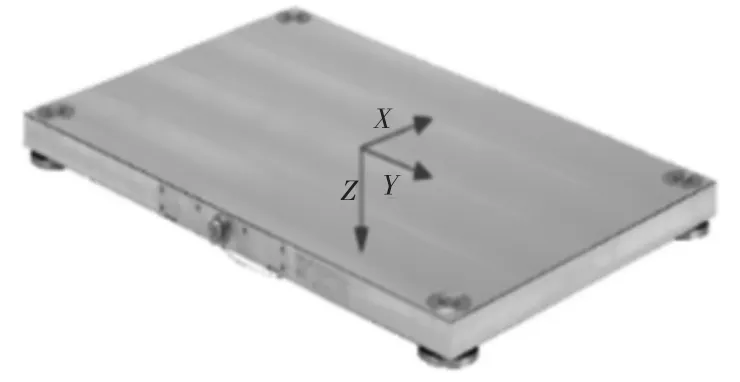
图3 Kistier测力训练平台
除上述几种平衡康复训练机器人外,现在市面上还有瑞士的Lokomat[2]、日本的Makikawa等多种平衡康复训练机器人,本文不再展开介绍。
2 平衡康复训练机器人仍存在的问题分析
目前,平衡康复训练机器人的发展已经由初步探索逐步走向智能化和人性化,国外发达工业国家已经将其作为一种产业并逐步实现了规模生产,而国内也正在由学术理论研究向市场生产靠拢,但根据上述国内外康复训练机器人研究现状的分析,仍然存在着很多不足的地方,需要进一步完善和改进。
(1)医疗机器人制造成本与可用性之间的矛盾
目前所制造的大型康复机器人成本一般较高,例如瑞士苏黎世联邦工业大学与hocoma公司合作研制了四自由度外骨骼式步态康复训练机器人Lokomat,虽然已经有100多台Lokomat系统在世界有名的康复医院和研究所成功地投入使用[3],但其售价达300万人民币每台,百万元以上的价格,一些中小型医院无力购买,个人用户更是消费不起。很多医院及康复机构还是难以承受;而价格适中的一些康复设备,仅仅是借助跑步机、悬吊系统等帮助患者进行康复训练,这类康复训练器械在康复训练过程中可能还需要专业人员的帮助,还不能完全称作平衡康复机器人。
(2)设备难以普及,后期维护维修困难
由于医疗器械市场准入制度严格,企业力所不及,大企业嫌弃高难度利润低,且大型设备对于普通家庭安装困难,使得下肢平衡康复训练机器人普及于大多数患者家庭的目标在短期内无法完成;对于高端的下肢康复机器人,关键技术还不够成熟,有些构造部件的生产来自于国外,具有技术保密权力;国内的生产厂家大多受困于规模,针对项目缺乏专项研究和后续开发,仅是仿造国外低端产品,导致设备故障后的维修困难,甚至出现无法维修的状况。
(3)对患者肢体动作准确性量化困难
大多数下肢平衡康复机器人仅仅能够对患者的动作做出一个记录,但对患者的动作准确性难以判断,如何对治疗进行一个合理的评估还是需要医师的指导,对患者动作是否标准和是否有进步评判不准确[4]。同时在患者的运动过程中,机器人对患者的误操作和巧合性动作难以区分,致使评判结果不准确,可信度不高。
(4)康复训练模式适用面较窄
患者的康复过程分为三个时期:康复初期,需要采用被动训练模式;痉挛期,目的是缓解和消除关节痉挛,需要对患肢进行抗痉挛训练[5];康复后期,关节分离运动已经完成,希望关节的协调性增强,机器人要能提供主动训练模式。目前现有的康复机器人虽然能对下肢运动功能障碍患者进行训练,但是大部分机器人仅仅针对某种特定病情的患者具有很好的康复效果,并不能适用于整个康复过程。
(5)用户体验感差,仿生性能不佳
虽然目前国内对下肢康复医疗机器人的研究日趋成熟,但在设备的推广和普及方面较为困难,原因之一就是大多数机器人的康复训练过程并不友好,患者穿戴时会感觉机器人到臃肿沉重,部分被动训练机器人动作柔化性较差,适应性和体验感不佳,加快患者训练的疲劳感,降低患者训练兴趣。
另外,针对不同类型的康复训练机器人,由于其在康复机理和运动控制方面各有不同[6],它们在目前使用过程中所表现出来的弊端也存在差异,具体分析如下:
(1)对于足底踏板式下肢平衡康复训练机器人,其基本组成主要是两套左右对称布置的踏板机构,通过对正常人步行姿态的分析,来实现模拟人正常行走时足心的步态轨迹和足底姿态,并利用一些机械约束实现步行时脚部运动,故市场和社区常见的踏板式步行训练机器人多采用曲柄摇杆机构,但是所生产的设备均将踏板直接固定在连杆上来带动足底进行步行训练,且踏板相对于脚掌为静止状态,无法对跖趾关节起到一个运动的作用,这种踏板姿态明显与人正常步行时的足底运动姿态特征不符,若长期使用其进行训练,会对患者的步行姿态习惯造成不良的影响,甚至阻碍患者的康复训练过程。
(2)对于站立式减重步行康复机器人,其面向对象大多为运动、车祸、脑卒中、骨科疾病等原因导致的下肢运动功能障碍患者,由于他们下肢的承重能力较差,因此需要在减重方式下进行训练。在目前所生产的康复机器人中,大多数方案均是采用单一固定框架加吊带的悬吊减重系统,这种减重系统不具有自动调节减重大小的功能[7],故存在减重力大小不准确和操作繁琐等问题,且由于吊带的拉力过于集中,很容易会使患者感到不适,加快患者的训练疲劳感,降低患者的训练兴趣。
3 优化方案
从以上问题可以看出,当前环境下,需要将现有的下肢康复机器人进行调整,以便其能更好地投入市场,总体优化方案如下:
(1)改进康复训练机器人的材料和体积,以便其能适应个人使用,如可穿戴型康复设备[8,9]。
(2)降低康复训练仪的开发成本,使其更快地普及于普通家庭。
(3)加强康复训练仪的模块化功能,做到集康复治疗和辅助训练与一体。
(4)寻找合理有效的评估方案,使其评价更具科学性和指导性。
(5)加强人机之间的互动体感[10],对患者的主动训练和被动训练能做出不同的反应,减少对患者的二次伤害。
另外,对于踏板式步态康复训练机器人足部机构的优化,可以在足底主踏板驱动的基础上,添加一个趾骨驱动机构,以便其能够更符合人在行走时的步态动作,改进方案如下:
足部机构主要是由前脚板部分、后脚板部分、支撑柱部分、位置限制部分、弹簧拉回装置组成前脚板和后脚板铰接在一起构成转动副。其结构如图4所示。

图4 足部机构优化设计图
其特征是:前脚板部分主要是由前脚踏板(8)组成,在踏板底部固定有长弹簧轴(9),一端连接脚踏板凹槽部分,一端通过滑轮(10)与销轴铰链连接;后脚板部分主要是由后脚板踏板(16)组成,前脚踏板和后脚板踏板通过合页(11)铰接在一起,合页通过紧固螺钉固定在前后脚踏板上,使得前后脚踏板有一定相对转角,同时合页的对转角有一个限位作用。短弹簧轴(12)与长弹簧轴(9)通过弹簧相连,起到使脚踏板保持平面的作用。在脚踏板的运动过程中,前脚踏板绕着合页的轴线运动,使得前后脚踏板形成一定的微小角度,达到趾骨在支撑期的弯曲效果;位置限定槽的槽面呈一定的角度,以达到真实的体现趾骨弯曲的角度。
4 总结与展望
下肢平衡康复训练机器人作为下肢康复治疗的一种有效手段,能够在一定程度上减轻人工负担,帮助患者快速康复,提高患者在康复训练过程中的兴趣[11]。因为其良好的临床使用效果,引起了国内外学者的广泛关注,因此在近几年得到了较快的发展。但由于目前的康复训练机器人均存在一些不足,在使用中均具有各自的局限性。因此,需要进行相关技术的攻关。国内外众多学者正在进行大量相关研究,旨在设计出更合理、更有效、更舒适的平衡康复训练机器人。因此,下肢平衡康复训练机器人有着广阔的发展空间和良好的应用前景,值得进一步开发研究。
参考文献:
[1]刘洪涛.截瘫患者下肢康复机器人设计与实验研究[D].秦皇岛:燕山大学,2010.
[2]Magagnin Valentina,Porta Albert,Fusini Laura,et al.Eval uation of the autonomic response in healthy subjects during treadmill training with assistance of a robot-driven gait ortho sis[J].Gait&Posture,2009,29(3):504-508.
[3]Hocoma AG.LokomatRehabilitation Device [EB/OL].Volketswil,Switzerland:Hocoma AG Medical Engineering,2018[2018-03-12].https://www.hocoma.com/solutions/lokomat.[4]Galen S.S.,Clarke C.J.,Allan D.B.,et al.A portable gait assessment tool to record temporal gait parameters in SCI[J].Medical Engineering&Physics,2011(33):626-632.
[5]Deaconescu T,Deaconescu A.Pneumatic Muscle Actuated Isokinetic Equipment for the Rehabilitation of Patients with Disabilities of the Bearing Joints[C]//The International Multi Conference of Engineers and Computer Scientists.Hong Kong:IMECS,2009:21-25.
[6]Krebs H I,Volpe B T,Aisen M L,Hogan N.Increasing productivity and quality of care:Robot-aided neuro rehabili tation[J].Journal of rehabilitation research and development,2000,37(6):639-652.
[7]Ikeuchi Y,Ashihara J,Hiki Y,et al.Walking assist device with body weight support system[C]//2009 IEEE/RSJ Interna tional Conference on Intelligent Robots and Systems.St.Louis,MO,USA:IEEE,2009:4073-4079.
[8]AdamZoss,Kazerooni H,Chu Andrew.On the Mechanical Design of the Berkeley Lower Extremity Exoskeleton(BLEEX)[C]//The 2005 IEEE International Conference on Robotics and Automation.Barcelona,Spain:IEEE,2005:4338-4344.
[9]Sankai Yoshiyuki.Leading Edge of Cybernics:Robot Suit HAL[C]//SICE-ICASE International Joint Conference 2006.Busan,Korea:SICE-ICASE,2006:18-21.
[10]杨灿军,陈 鹰,路雨祥.人机一体化智能系统理论及应用研究探索[[J].机械工程学报,2000,36(6):42-47.
[11]钱振美.卧式下肢康复机器人的研究[D].哈尔滨:哈尔滨工程大学,2006.
