基于自然驾驶数据的高速公路出口换道决策模型
2018-05-04张兰芳张佳妍方守恩郭静秋
张兰芳, 陈 程, 张佳妍, 方守恩, 郭静秋
(同济大学 道路与交通工程教育部重点实验室, 上海 201804)
高速公路出口作为出口分流车辆与直行车辆的交织区域,车辆换道行为多发,是影响高速公路运行效率和安全的关键所在.出口换道是车辆为顺利驶离主线而进行的换道行为,驾驶员必须在出口前更换至最外侧车道,距离出口越近,换道紧迫性程度越高.换道行为增加了交通流运行的复杂性和事故风险.研究表明,换道行为是导致多车道高速公路交通流扰动的主要原因[1].根据国外资料统计,高速公路的交通事故有近40%发生在匝道上,其中发生在出口匝道上的事故约是进口匝道上的2倍[2].为了保障出口匝道处的行车安全性,提高管理水平,有必要对高速公路分流区上游的出口换道行为特性进行针对性研究.
国内外对城市道路、高速公路一般路段换道特征和影响因素均展开过研究,分别从驾驶员因素[3-5]以及道路与车辆因素[6-8]角度出发分析车道变换行为特性.在已有研究中,换道行为根据不同的换道意图被分为强制性换道和自由性换道[9].一般来说,出口车辆执行强制性换道(如出匝、交织或避让障碍)而直行车辆执行以改善通行环境为目的的自由性换道.到目前为止,针对多车道高速公路出口环境下的换道行为仍缺乏相应研究.
现有换道模型大致可分为两大类[10]:①为了捕捉到变道决策过程的模型(Lane Change Decision (LCD) Model);②确定变道行为对周围车辆影响的模型(Lane Change Influence (LCI) Model).对于LCD模型,Gipps[11]最先建立考虑交通信号、障碍物和重型车影响并针对城市道路的换道决策模型,其后Gipps模型得到改进并扩展至高速公路[12-13];Ahmed等[14]基于随机效用理论建立换道行为模型,且换道过程被定义为换道决定、目标车道选择及选择可接受间隙执行换道3个步骤;Toledo[15]则提出一种能够同时考虑强制换道和自由换道的集成概率换道模型;其余分析方法包括元胞自动机[16]、马尔可夫过程[17]、基于风险(生存)的换道模型[18]及智能算法,如人工神经网络[19]、模糊推理等,其中,Balal等[20]基于模糊推理系统针对高速公路自由换道行为建立了驾驶员二元决策模型,Moridpour[21]采用模糊理论构建重型车辆的换道决策模型以研究车道限制策略,实现减少客货交织的目标.既有研究大多基于理论计算或者交通仿真的方法进行研究,或利用驾驶模拟器和场地实验采集换道驾驶行为信息,由于实验设备和环境对驾驶人行为的干扰和心理暗示,往往不能反映驾驶人的实际驾驶行为,导致现有的换道模型在适用性和精度方面存在不足.
针对模拟驾驶或定点拍摄等实验手段难以反映驾驶员最真实换道行为[22],美国最先开展100辆车的自然驾驶研究[23],2006年日本亦启动60辆出租车的自然驾驶实验[24],而国内尚无充足的实车数据用于支撑换道特征研究.自然驾驶研究是指在自然状态下(无干扰、无实验人员出现、日常驾驶状态下)利用高精度数据采集系统观测、记录驾驶员真实驾驶过程的研究[25].由同济大学、通用汽车中国公司、美国弗吉尼亚理工大学交通研究中心三方合作开展的“自然驾驶研究项目”是国内首次开展的针对自然驾驶的研究项目,其目的在于研究中国驾驶员与车辆、道路、交通条件以及交通控制设施的相互作用.实验由5辆测试轿车实时监测并记录了60位中国驾驶员在自然状态下的实际驾驶行为特征.
本研究依托上海自然驾驶实验(SH-NDS)项目,采集驾驶员真实驾驶状态下的驾驶行为样本及车辆运行数据,确定换道车辆样本的识别指标与标准,提出高速公路出口换道样本的筛选方法,重点分析高速公路出口换道行为特性.以单向4车道高速公路为例构建换道决策模型,进而针对高速公路出口范围内不同交通流水平下的出口换道行为进行效用分析.
1 数据采集与提取
1.1 自然驾驶样本采集与筛选
参与本次自然驾驶实验的60位驾驶员年龄分布于35~50岁之间,均有5年以上驾龄,参加实验之前已行驶的总里程大于2万km且日常行驶平均里程不小于40 km.实验时间跨度自2012年至2016年,每位驾驶员驾驶指配的实验车辆在开放路网中行驶,行驶路线按照日常工作生活需求自主选择,且无实验人员陪同,2~3个月后更换下一批驾驶员,直至完成所有实验人员的驾驶行为数据采集.实验车辆在隐蔽处安装高清摄像头、全球定位系统(GPS)、三轴加速度仪、多普勒雷达、车道偏移系统、事件按钮等车载数据采集系统,全程记录驾驶员在自然状态下的驾驶行为,总计包括约75万km行程,超过8万h视频数据.
基于本次研究的对象与目的,与研究相关的高速公路出口换道数据包括:①高速公路出口范围内(出口前车辆开始进行换道至最终进入匝道的整个过程)车辆运行的轨迹数据、运动特性参数(速度、加速度等);②目标车辆周围交通流情况(雷达识别范围内的其他车辆);③车辆驶出高速公路出口过程中的视频数据,包括车辆前方、车辆后方、驾驶员面部、手部操作的视频,如图1所示.
自然驾驶数据样本量大、参数条目多,已有数据集包含1万多个CSV格式文件,其中单个文件存储实验车辆单次出行的所有数据.为从庞杂数据中筛选出高速公路出口范围内的换道样本,数据采集与提取过程如图2所示:①对实验采集的自然驾驶数据进行清洗,包括筛除出行时间短于30 min的无效文件、基于拉依达法则剔除异常值、采用线性插值法补充缺省值.②筛选经过高速公路出口的样本,排除城市道路、高速公路普通路段的无关数据.根据记录在CSV格式文件中的出行过程经纬度数据,在Google Earth中标定实验车辆行驶路径并匹配至实际路段;将匝道口作为高速公路出口节点,针对所研究的各个高速公路出口框定经纬度坐标范围作为检索依据,即如图3中A、B、C、D四点所围成的范围.其中,A点位置定在距离匝道口50 m处,由于车辆GPS位置采集频率为1 Hz,设定C点距A点8~10 m以确保能在目标范围内捕捉到行驶轨迹点.行驶路径通过目标范围的出行即为出口样本,以出匝时刻为基点向前提取数据点以得到高速公路出口处驾驶员从内侧车道到驶出匝道的整个换道过程.考虑到道路条件的影响,研究所选的出口均限定为形式一致(平行式)、相邻出口间距大于4 km且位于直线段.③针对各次出匝过程完成换道样本的筛选.

a 摄像仪视野范围示意图



b 视频数据框架图1 自然驾驶实验数据采集系统Fig.1 Video scenes of SHNDS

图2 数据采集与提取过程Fig.2 Procedure of data collection and extraction

图3 四车道高速公路出口范围示意图Fig.3 An example of the node range
1.2 出口换道样本识别
在完成筛选出口样本的基础上,需要提取各次出匝过程中的所有换道行为样本数据.依据自然驾驶实验所采集的数据,本次研究为识别驾驶员换道行为,采用车道偏移参数作为主要指标,同时结合视频进行判断.车道偏移参数LO表征实验车辆中心线偏移当前车道中心线的距离.对车道中心线的识别由车载车道偏移系统传感器模块实现.LO数据采集频率为10 Hz,精度为0.000 1 m.选取示例出行样本如图4所示.LO参数测量时每一条车道独立成坐标系,车辆中心线与车道中心线重合位置的坐标为0;车辆偏离当前道路中心线,在其右侧时LO为正值,在其左侧时LO为负值;当车辆中心线越过车道线时,传感器将自动识别另一条车道的中心线.LO数值由于车道参考系发生变化而产生从正到负(或从负到正)的突变,根据突变点即可识别出目标车辆的单次换道与连续换道行为.故采用LO数据的突变特性作为判断换道是否发生的标准.
此外,尽管实验采集了方向盘转角参数,但由于车辆在高速行驶状态下方向盘转角变化不明显,相比车道偏移参数较不敏感,识别率较低,故不作为判断车辆换道的主要指标.

图4 示例出行样本的车道偏移时间关系Fig.4 An example of LO values in the dataset
对出口样本在研究范围内的行驶全程进行筛选,本次实验共识别出433组换道样本,为后续分析建立了基础.
1.3 换道样本数据初步分析
分析建立在已有的433组换道样本基础上.实验路段为8车道高速公路(单向4车道).为便于说明,将最内侧车道定义为1车道,最外侧车道定义为4车道,行进方向由左至右4条车道依次为1、2、3、4车道,如图5所示.

图5 车辆出匝换道情况示意图Fig.5 Lane-changing process in freeway off-ramp areas

图6中横坐标表示车辆换道位置与出口匝道之间的距离,分析线形可知:换道需求次数越多的样本,在距出口越远的地方开始执行换道,且尽管不同车道换道距出口距离的15%分位值存在明显差距,但85%分位值较为接近且与出口距离均小于500 m.15%~85%分位值区间范围指示了在不考虑交通状态差异下大多数驾驶员进行出口换道行为的位置分布,如图7所示.
2 换道决策模型
2.1 影响因素分析
对于本文所研究的高速公路出口换道行为,其换道行为成因包括:
(1)具有车道变换的需求.在高速公路出口范围内,驾驶员由于需要离开主线驶入出口匝道而产生了必然的换道需求.

图6 不同车道换道位置累积频率Fig.6 Cumulative frequency graph of lane-changingposition on different lanes
(2)具备车道变换的时空条件.车辆与目标车道前后车之间应具备一定的可穿越间隙,并且在时间上保证驾驶员的感知、决策和操作控制能顺利实现车辆换道目的.

图7 高速公路出口换道位置分布Fig.7 Spatial range of lane-changing in freeway off- ramp areas
结合上述分析,可知驾驶员在高速公路出口进行换道决策而选择目标车道时,应具有如表1所示的特性变量.
其中,对于交通流环境变量G取值定义如下:当后方车辆速度小于前车速度,或者两车速度基本接近时,G→∞.为便于定量分析,依据Olsen的处理方法[26],将以上两种情况下的G值统一界定为30 s;当后车速度大于前车速度时,若其G在[0,30]之间则取其真实值.

表1 特性变量及数据基础Tab.1 Influencing factors and data sources
2.2 换道决策模型构建
根据影响因素分析,以随机效用理论为基础,建立高速公路出口换道决策模型.所研究的高速公路出口范围内车辆换道行为存在向左换道和向右换道两种情况,为二分变量,构成了目标车道的选择集.根据最大效用原理,驾驶员换道决策行为是为了获得最大期望效用值.其中,效用可衡量驾驶员在特定交通流环境以及行驶路径组合下更换至特定车道所能获得的满足程度,具有相对意义.驾驶员通过对不同换道行为进行效用评价,选择效用最大的车道作为目标车道,对应概率可由模型得到,以此解释了驾驶员对换道目标的选择行为.驾驶员选择目标车道的效用函数可表示为
Un,T=Vn,T+εn,T=Ci+∑βTXn,T+εn,T
(1)
式中:下标T={L,R},表示选择集中包含左侧车道(L)和右侧车道(R)两种情况;Vn,T为可观测的确定项;εn,T为效用函数的随机误差项;Ci为截距;Xn,T为所有影响目标车道效用的解释变量;βT为各个解释变量的对应系数.根据误差项的假定,离散选择模型可分为Logit模型和Probit模型.假定随机误差项独立同分布且服从Gumbel分布,因而对于驾驶员n,在时间t选择目标车道T的概率可用Binary Logit(BL)模型表示如下:
(2)
由于样本类型的限定,向左换道的样本量相对少于向右换道,因而在因变量设定时,将向左换道行为定义为Y=1,即探究高速公路出口范围内相对于向右换道,驾驶员向左换道的机会比(odd ratio)及各变量的影响程度.由于目标车辆行驶在1车道与4车道时其换道选择唯一,均不满足二项选择假设,不符合模型定义,故所选取样本仅包含位于2车道与3车道的319组换道行为.经过筛选后Y=1样本量满足自变量数目10倍以上的要求.
2.3 参数标定
通过MATLAB软件对模型参数进行标定.经检验,各变量方差膨胀因子均小于5,各变量不存在多重共线性关系.各参数含义及标定结果如表2所示.
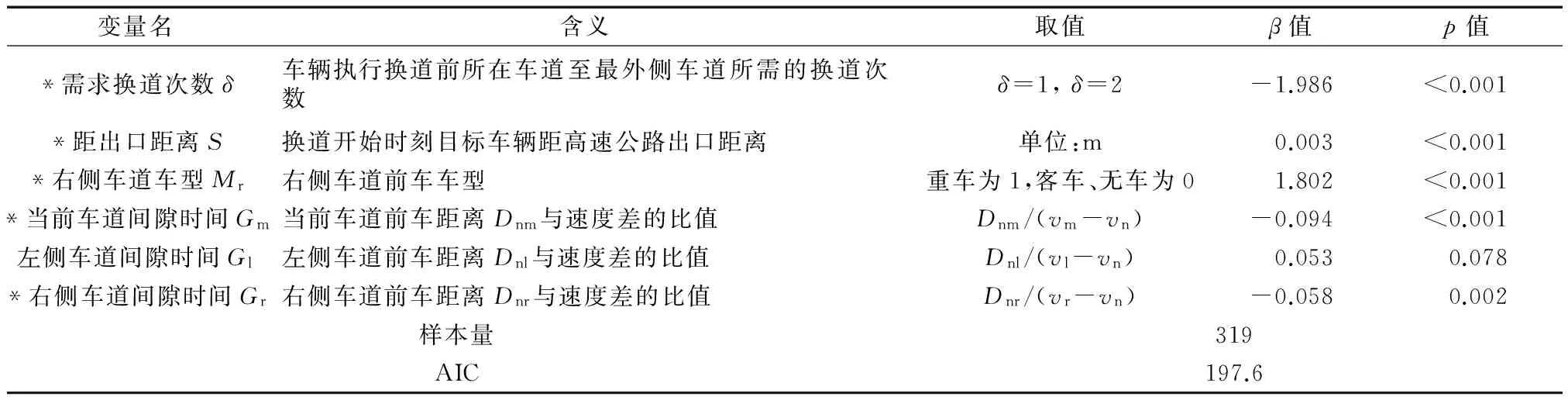
表2 模型参数及检验值Tab.2 Variable definitions and estimations
注:*号表示变量具有显著性;对于我国单向4车道高速公路,货车按规定行驶于外侧3、4车道,故仅考虑右侧车道行驶重型车辆的情况;下标n表示目标车辆,m表示当前车道前车,l表示左侧车道前车,r表示右侧车道前车.
由表2可知,左侧车道间隙时间Gl对应的p值大于0.05,在95%置信区间上不具有统计学意义.筛除变量左侧车道间隙时间Gl后对模型重新拟合,可得到高速公路出口换道车辆在进行目标车道选择时左侧车道的效用函数,如式(3)所示.经测试,模型对出口换道行为预测的准确率达到86.21%.
(3)
(1)需求换道次数δ和距出口距离S体现了出匝路径选择对车道效用的影响进而决定驾驶员的换道决策.δ系数为负值表明对于出匝车辆,受在到达出口前变更至最外侧车道的最终目标限制,当前所在车道需求换道次数越多,左侧车道对于驾驶员的效用越低;相应地,选择向左换道的概率越低,即受需求换道次数影响,驾驶员处于2车道时选择向左换道的概率将低于3车道.S系数为正值表明距离出口匝道区域越远,驾驶员的出匝紧迫度越低,左侧车道对于驾驶员的效用越高.
(2)右侧车道车型Mr、当前车道间隙时间Gm和右侧车道间隙时间Gr体现了车辆周围交通流环境对驾驶员换道决策的影响.通过效用函数可知右侧车道车型对换道行为具有显著影响,当右侧车道前车为重车时,左侧车道对驾驶员的效用显著提高,由于重车行驶速度慢、制动性能差,驾驶员倾向于向左换道以避免跟驰重车;左侧车道间隙时间Gl在模型中不具有统计学意义,推测是由于左侧1、2车道为快车道,G值一般较高,对效用不产生显著差异;Gm和Gr系数均为负值表明当前所在车道与右侧车道的交通流运行条件良好,符合驾驶员期望时左侧车道对出匝车辆的效用不高,吸引力不强,只有在当前车道与右侧车道的空间舒适感均无法满足要求时,驾驶员向左换道的概率才会相应提升.
3 模型应用
根据图5所示的车辆出匝换道情况示意图,基于高速公路出口换道决策模型得出的效用函数,可以分析在不同交通流水平下的车道效用,以对高速公路出口范围内出匝车辆的换道行为作进一步研究.
将交通流运行状况分为自由流、稳定流和拥挤流3个水平,并通过换道决策模型中的G指标进行表征.通过对实测数据进行k-means聚类分析,可定义各个交通流状态下的代表性水平:自由流下Gm=30 s,Gr=30 s;稳定流下Gm=20 s,Gr=15 s;拥挤流下Gm=5 s,Gr=5 s.当需求换道次数δ=1时,根据决策模型可得到2、4车道的效用值;当需求换道次数δ=2时,可得到1、3车道的效用值,从而可作出高速公路出口范围内不同交通流水平下完整的分车道效用图,如图8所示.

a 自由流

b 稳定流

c 拥挤流

图8换道效用分布图
Fig.8Utilitygraphinfreewayoff-rampareas
3.1 效用分布同质性分析
(1)由效用等高线走向可发现,U2>U1,U3>U4,即驾驶员获得最大效益的行驶路线是由2车道变更至3车道再于出口匝道前换至最外侧车道出匝.
(2)效用场左上角与右下角为低效用区域,边角4个特征点的效用值如表3所示,对应图5所示实际道路平面,即出口匝道上游外侧车道和出口匝道附近内侧车道对出匝车辆的效用较低,故驾驶员的出口换道行为主要集中于图中的次对角线带状低灰度区域,与1.3节中所得高速公路出口换道位置分布形成印证,反映所构建的模型具有合理性.
3.2 效用分布异质性分析
对比分析不同交通流水平下的换道效用场分布图并结合表3可知:
(1)随着交通流状态由自由流过渡到拥挤流,效用最高点由出口处转移至最上游内侧车道,表明随着交通流密度增大、流速降低,出匝车辆驾驶员通行环境改善需求对换道决策的影响逐渐提升.
(2)在交通流状态由自由流过渡到拥挤流的过程中,内侧1、2车道的高效用区域逐渐向下游出口扩展,外侧3、4车道的高效用区域则逐渐受到挤压.具体表现为随交通流密度的增大,出匝车辆驾驶员开始向右换道的位置将逐渐接近分流区,其在上游的向左换道行为会更加活跃以寻求车道变换效益.其原因在于自由流状态下内外车道运行条件无明显差异,驾驶员更愿意提前向右换道以为出匝做好准备而不影响行车舒适性;当交通流密度增大,上游出匝车辆受到周围车辆挤压,将更倾向于保持原有车道行驶或向左变道以寻求通行环境改善,其向右换道位置相应地趋近于出口.此现象反映出高速公路出口换道行为在自由流环境下主要表现为强制性换道特征,而在拥挤环境下则兼有强制性换道和自由性换道的特征,针对之前出口换道属于强制性换道的既有认识进行了修正.

表3 特征点效用值Tab.3 Utility values of vertexes in utility graph
(3)当由自由流过渡至稳定流状态时效用等高线分布显著趋于集中,而由稳定流过渡至拥挤流则无明显变化.推测其原因在于换道行为的实施依赖于必要的可穿越间隙,自由流环境下车辆间隙较为宽裕,交通流密度的适当波动始终能满足可穿越间隙的要求,换道机会相对充分;当达到稳定流状态后交通流密度继续提高,车辆间隙受到压缩,可穿越间隙难以满足导致自由换道普遍无法实施,车辆换道需要依赖于斜插或挤压实现.此现象反映出交通流的弹性特征,即自由流状态下换道行为对于不同的交通环境可呈现出弹性变化,而在拥挤状态下其弹性丧失并导致高风险换道行为多发.
4 结论
自然驾驶研究为理解驾驶员在自然状态下与车辆、道路以及交通环境的相互作用提供了可能.本文以高速公路出口换道行为作为研究对象,基于上海自然驾驶实验所采集的驾驶员真实驾驶状态下的驾驶行为样本和车辆运行参数,根据车道偏移参数和方向盘转角作为指标识别筛选出高速公路出口换道样本并建立样本集.本次研究以单向4车道高速公路为例构建换道决策模型,依托随机效用理论,选用Binary Logit(BL)模型对出口范围内的换道行为进行拟合并得出车道效用函数,进而作出高速公路出口范围内分别在自由流、稳定流和拥挤流水平下的分车道效用场分布图.分析结果表明:驾驶员在高速公路出口的换道决策受到行驶路径和交通流环境的综合影响;出匝车辆的换道行为是出匝意愿与通行环境改善需求两方面平衡的结果,表现为兼有强制性换道与自由性换道的行为特性,有别于过往出口换道属于强制性换道行为的固有认识,表明了驾驶员换道决策的复杂性;拥堵环境下将强化后者的影响并导致驾驶员的出口换道策略倾向于激进.研究结果有助于理解高速公路出口换道行为的相关机理,并有助于为改善高速公路出口范围内车道管理、出口引导设施的布设以及匝道管理等提供理论指导,具有较高的应用价值.
参考文献:
[1] BARRIA J A, THAJCHAYAPONG S. Detection and classification of traffic anomalies using microscopic traffic variables[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 695.
[2] 卢川,王朝阳,项乔君,等. 高速公路出口匝道交通安全评价方法研究[J]. 现代交通技术, 2011, 8(6): 60.
LU Chuan, WANG Chaoyang, XIANG Qiaojun,etal. Research on safety evaluation method for expressway off-ramp[J]. Modern Transportation Technology, 2011, 8(6): 60.
[3] SUN D J, ELEFTERIADOU L. Lane-changing behavior on urban streets: a focus group-based study[J]. Applied Ergonomics, 2011, 42(5): 682.
[4] 武超群. 基于驾驶员眼动的车道变换特性研究[D]. 哈尔滨: 哈尔滨工业大学, 2008.
WU Chaoqun. Study on characteristics of lane change based on eye movements analysis[D]. Harbin: Harbin Institute of Technology, 2008.
[5] SUN D J, ELEFTERIADOU L. Lane-changing behavior on urban streets: an “in-vehicle” field experiment-based study[J]. Computer-Aided Civil and Infrastructure Engineering, 2012, 27(7): 525.
[6] 黄秋菊. 车道变换行为特性及其对交通安全影响的研究[D]. 哈尔滨: 哈尔滨工业大学, 2007.
HUANG Qiuju. Study on lane change behavior character and its influence to traffic safety[D]. Harbin: Harbin Institute of Technology, 2007.
[7] 徐慧智,程国柱,裴玉龙. 车道变换行为对道路通行能力影响的研究[J]. 中国科技论文在线, 2010, 5(10): 749.
XU Huizhi, CHENG Guozhu, PEI Yulong. Study on effect of lane-changing behavioral characteristic to capacity[J]. Sciencepaper Online, 2010, 5(10): 749.
[8] 漆巍巍,裴玉龙. 城市道路拥堵状态下驾驶人换道特性研究[J]. 城市交通, 2014, 12(4): 72.
QI Weiwei, PEI Yulong. Characteristics of drivers’ lane change under traffic congestion on urban roadways[J]. Urban Transport of China, 2014, 12(4): 72.
[9] TOLEDO T, CHOUDHURY C F, BEN-AKIVA M E. Lane-changing model with explicit target lane choice[J]. Transportation Research Record: Journal of the Transportation Research Board, 2005, 1934(1): 157.
[10] ZHENG Z D. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B, 2014, 60: 16.
[11] GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B, 1986, 20(5): 403.
[12] YANG Q I, KOUTSOPOULOS H N. A Microscopic traffic simulator for evaluation of dynamic traffic management systems[J]. Transportation Research Part C, 1996, 4(3): 113.
[13] HIDAS P. Modelling vehicle interactions in microscopic simulation of merging and weaving[J]. Transportation Research Part C, 2005, 13(1): 37.
[14] AHMED K I, BEN-AKIVA M E, KOUTSOPOULOS H N,etal. Models of freeway lane changing and gap acceptance behavior[C]∥Proceedings of the 13th International Symposium on the Theory of Traffic Flow and Transportation. Lyon: Transport Research Laboratory, 1996: 501-515.
[15] TOLEDO T. Integrated driving behavior modeling[D]. Cambridge: Massachusetts Institute of Technology, 2007.
[16] 王艳娜,周子力,王新伟. 基于元胞自动机的模糊控制换道模型[J]. 计算机应用, 2007, 27(5):1197.
WANG Yanna, ZHOU Zili, WANG Xinwei. Lane-changing model with fuzzy control based on cellular automata[J]. Computer Applications, 2007, 27(5):1197.
[17] WORRALL R D, BULLEN A G, GUR Y. An elementary stochastic model of lane-changing on a multilane highway[J]. Highway Research Record, 1970(308): 1.
[18] HAMDAR S H. Modeling driver behavior as a stochastic hazard-based risk-taking process[D]. Evanston: Northwestern University, 2009.
[19] WEI C. Developing freeway lane-changing support systems using artificial neural networks[J]. Journal of Advanced Transportation, 2010, 35(1): 47.
[20] BALAL E, CHEU R L, SARKODIE-GYAN T. A binary decision model for discretionary lane changing move based on fuzzy inference system[J]. Transportation Research Part C, 2016, 67: 47.
[21] MORIDPOUR S. Analysing the performance of a fuzzy lane changing model using data mining[J]. Data Mining in Dynamic Social Networks and Fuzzy Systems, 2013. DOI: 10.4018/978-1-4666-4213-3.cho13.
[22] ZHAO D, PENG H, NOBUKAWA K,etal. Analysis of mandatory and discretionary lane change behaviors for heavy trucks[C/CD]∥Proceedings of the 12th International
Symposium on Advanced Vehicle Control. Tokyo: Tokyo University of Agriculture and Technology, 2014.
[23] DINGUS T A, KLAUER S G, NEALE V L,etal. The 100-car naturalistic driving study: phase II-results of the 100-car field experiment[R]. Washington D C: National Highway Traffic Safety Administration, 2006.
[24] UCHIDA N, KAWAKOSHI M, TAGAWA T,etal. An investigation of factors contributing to major crash types in Japan based on naturalistic driving data[J]. IATSS Research, 2010, 34(1): 22.
[25] FITCH G M, HANOWSKI R J. Using naturalistic driving research to design, test and evaluate driver assistance systems[M]∥Handbook of Intelligent Vehicles. London: Springer, 2012: 559-580.
[26] OLSEN E C B. Modeling slow lead vehicle lane changing[D]. Blacksburg: Virginia Polytechnic Institute and State University, 2003.
