某气垫船动力系统仿真研究
2018-05-03彭磊
彭 磊
(1.上海交通大学 船舶海洋与建筑工程学院 上海200240;2.中国船舶及海洋工程设计研究院 上海200011)
引 言
全垫升气垫船是一种现代高性能船舶,依靠垫升风机向船体底部围裙包络面内快速充入压力空气,将船体抬升至完全脱离水面或陆地,减小船体所受的阻力,同时依靠空气螺旋桨推进,使船体可以在水面或陆地上高速航行。全垫升气垫船具有超浅吃水、静水快速性好、两栖性好等优点,在军用运输和民用运输方面均具有广泛的用途。
全垫升气垫船的动力系统与常规舰船差别较大,一般中大型气垫船均以燃气轮机作为主动力装置,驱动空气螺旋桨和垫升风机。大部分气垫船的传动形式为机桨扇串联直接传动,采用机桨扇联合操纵控制系统;也有部分气垫船采用推进与垫升系统分离独立运行的传动形式,机桨与机扇各自匹配控制。目前国内有不少有关机桨扇串联直接传动的气垫船动力系统性能仿真研究[1-2],且以实船试验结果对仿真计算值进行修正,大大提高了仿真精度,但对采用机桨与机扇独立分离运行的气垫船动力系统性能仿真的研究则较少。由于传动形式的不同,其控制系统设计也大不相同。因此,为更全面了解和掌握具有不同传动形式的气垫船动力系统性能,为气垫船动力控制系统的设计提供参考,有必要开展某气垫船动力系统性能仿真研究。
本文以某全垫升气垫船为研究对象,该气垫船采用推进与垫升系统分隔运行的传动形式,通过对该船动力系统建模,利用仿真方法进行计算分析,研究该船动力系统性能。
1 动力系统模型
1.1 物理模型
本文的研究对象是某全垫升气垫船的动力系统和船体运动特性,动力系统包括推进与垫升燃气轮机、垫升风机、空气螺旋桨、螺旋桨减速器、螺距控制单元和风机控制单元等,船体运动特性包括艇体、海况等内容。系统结构框图参见图1。
1.2 燃气轮机数学模型
该气垫船采用的燃气轮机由进气道、低压压气机、高压压气机、燃烧室、高压涡轮、低压涡轮、动力涡轮以及排气道组成,功率为前端输出,其工作原理如图2所示。
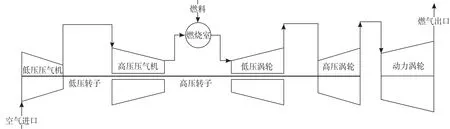
图2 燃气轮机工作原理图
该气垫船所选燃气轮机的功率特性曲线如下页图3所示。
根据图3,可拟合得到燃气轮机数学模型公式:

式中:Ne为燃机实际功率,kW; gk为工况;ne为动力涡轮实际转速,r/min;neopt为最佳动力涡轮转速(图3中每条抛物线最高点对应的横坐标值),r/min。
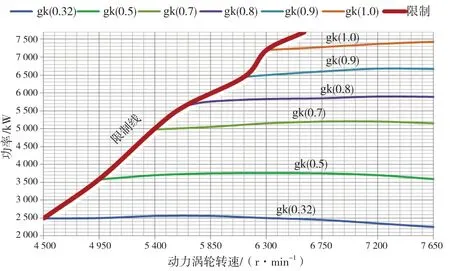
图3 燃气轮机功率-转速特性曲线
1.3 推进系统模型
1.3.1 空气变距螺旋桨模型
根据风洞试验,对试验数据进行回归分析,得到螺旋桨的数学模型如下:
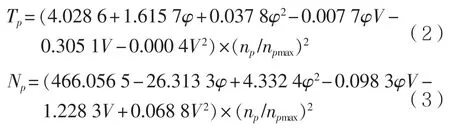
式中:Tp为螺旋桨推力,kN;φ为螺距角,°;V为空气来流速度,m/s;np为螺旋桨转速,r/min;npmax为螺旋桨最大转速,r/min;Np为螺旋桨功率,kW。
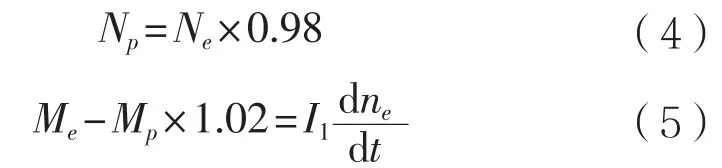
1.3.2 推进轴系运动学模型
推进减速器的效率取0.98,则推进轴系的数学模型为:
1.4 垫升系统模型
1.4.1 垫升风机模型
根据该气垫船垫升风机缩尺模型试验得到垫升风机的无因次特性曲线,可计算垫升风机的吸收功率为:

式中:Nf为风机吸收功率,kW;Qf为风机流量,m3/s;ηf为风机效率,一般取0.85;风机压力为风机转速,r/min。
1.4.2 垫升轴系运动学模型
单舷垫升轴系为1台燃机通过1台中间减速器、数个中间支撑以及2台垫升风机减速器,分别驱动2台轴流式垫升风机。由于轴系较长,故中间支撑较多,单舷垫升轴系有8个中间支撑轴承。垫升系统中各减速器效率均取0.98,轴承效率取0.997,因此垫升轴系运动学模型为:

式中:Mf为垫升风机扭矩(折算至燃机输出端),N·m,;if为垫升风机与燃机间减速比;I2为垫升轴系转动惯量,kg·m2。
1.5 机桨扇控制系统模型
该气垫船推进系统与垫升系统独立运行,控制系统采用机桨与机扇分开控制的模式,控制模型由三部分组成:一块是燃机启动阶段的时序控制模型,一块是燃机转速控制模型,另一块是螺旋桨变距操纵控制模型。
在研究中对该气垫船的控制模型采用增量式PID控制器,与传统位置式PID控制器相比,不必采用以往误差值的累加量,只需考虑误差值的增量,可使误动作时造成的影响较小,也容易通过加权处理得到比较理想的控制效果[3]。
1.6 船体阻力模型
全垫升气垫船运行于水气界面,船体所受阻力较复杂,其静水阻力一般可表示为[4-5]:

式中:Ra为空气型阻力,kN;Rm为动量阻力,kN;Rz为气垫兴波阻力,kN;Rse为纵倾阻力,kN;Rsw为围裙湿水阻力,kN为围裙兴波阻力,kN为风浪中型阻力增量,kN为风浪动量阻力增量,kN; 为风浪中围裙湿水阻力增量,kN。以上各阻力通过相应的经验公式计算,然后根据试验进行修正。
1.7 船体运动学模型
根据牛顿第二定律,该船体的运动学模型为:

式中:α为推力减额系数,一般取0.05;Vs为船的绝对速度,m/s;m为船的质量,kg。
2 仿真方法及验证
气垫船动力系统是一个非线性、非定常系统,各部分的时间常数相差很大。因此,本文采用Ode5(Dormand-Prince)法对该气垫船动力系统进行动态仿真。仿真软件以Matlab语言及Simulink工具箱为基础,并结合该气垫船的部分参数所研发。[6]图4 -图6为所研发的仿真框图。
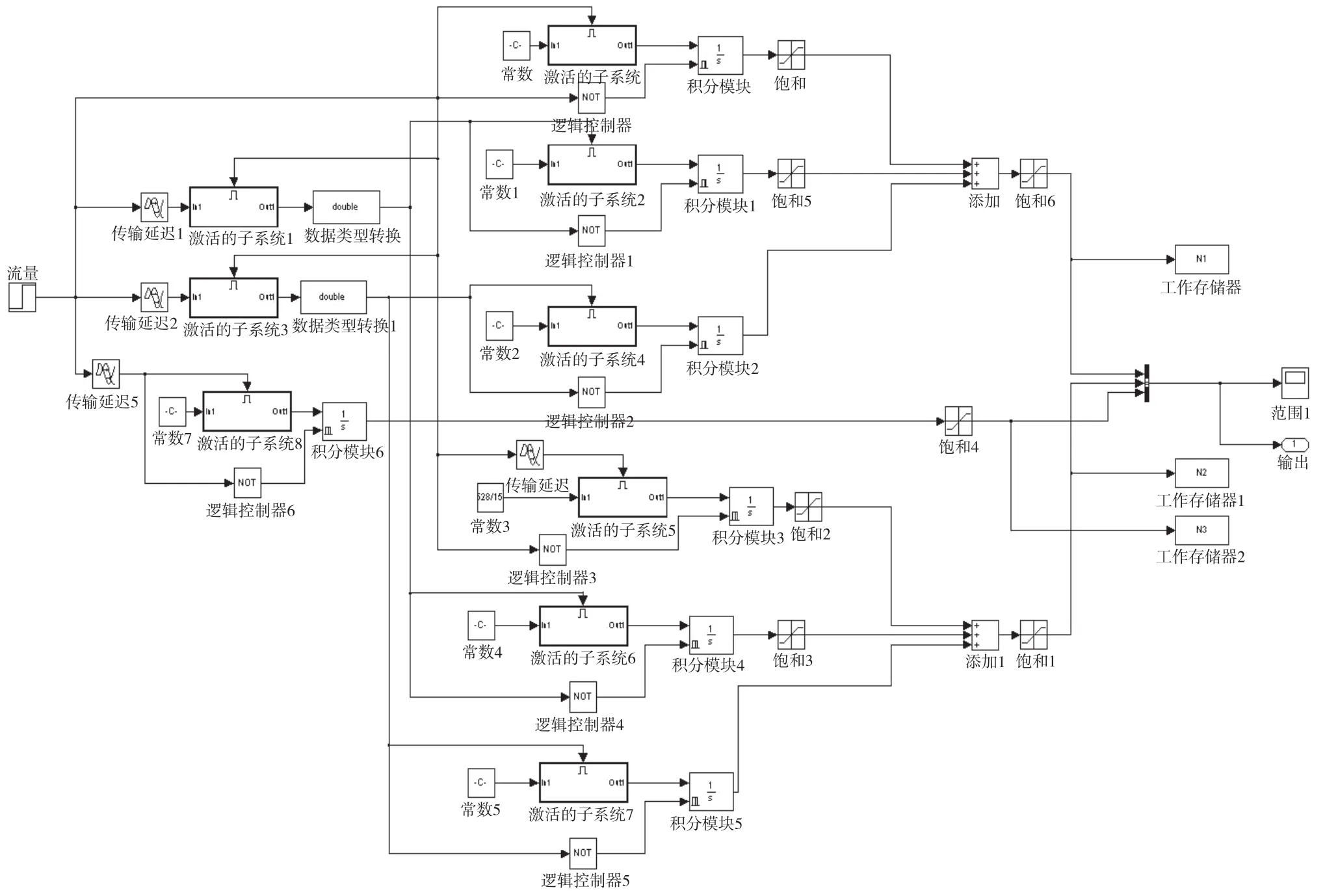
图4 燃机起动仿真模型
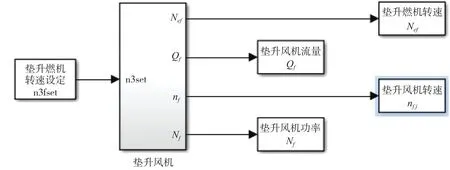
图5 垫升系统仿真模型
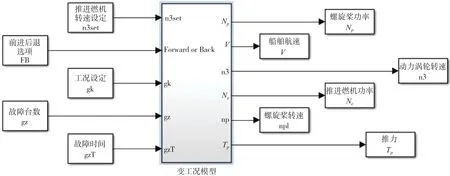
图6 变工况仿真模型
在进行系统仿真计算前,对整个动力系统的准确性进行验证,选取气垫船典型工况和参数设定值(取0~1级海况,动力涡轮转速7 200 r/min),将系统仿真结果与实船试验结果进行比较分析。比较结果参见表1。
由表1可知,系统仿真结果与实船试验结果偏差较小;取其他典型工况和海况条件,系统仿真计算的结果也与试验结果基本吻合,可以验证本文所建仿真模型合理有效。
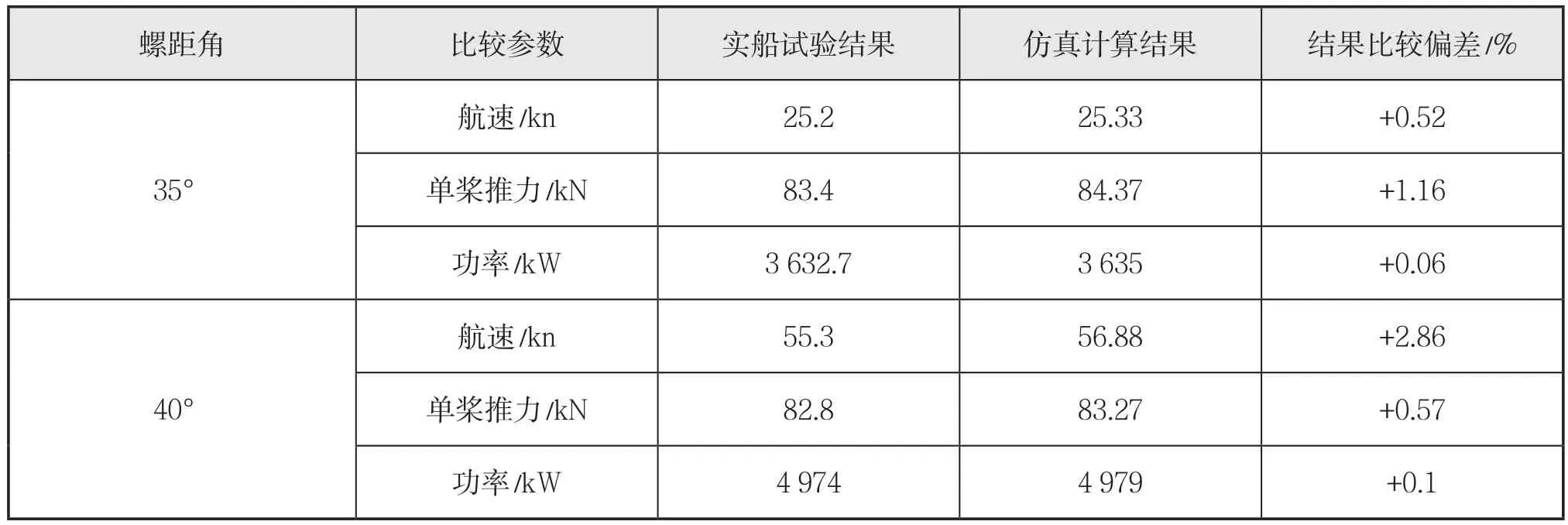
表1 系统仿真计算和实船试验结果比较
3 动力系统动态仿真研究
3.1 起动过程模拟仿真
该气垫船起动过程可分为两个阶段:第一是燃机起动过程,需要将该气垫船的所有燃机起动并进入慢车暖机状态,直至暖机结束。此时气垫船具备了出航的条件,但仍无法立即加速航行。第二个阶段是该气垫船垫升过程,即通过升高驱动垫升风机的燃机动力涡轮转速至某特定的转速值,使气垫船达到所需的垫升高度,确保船的阻力处于较小的状态。此后,只要提高推进工况,气垫船即可快速航行。整个起动过程仿真参见图7和图8。
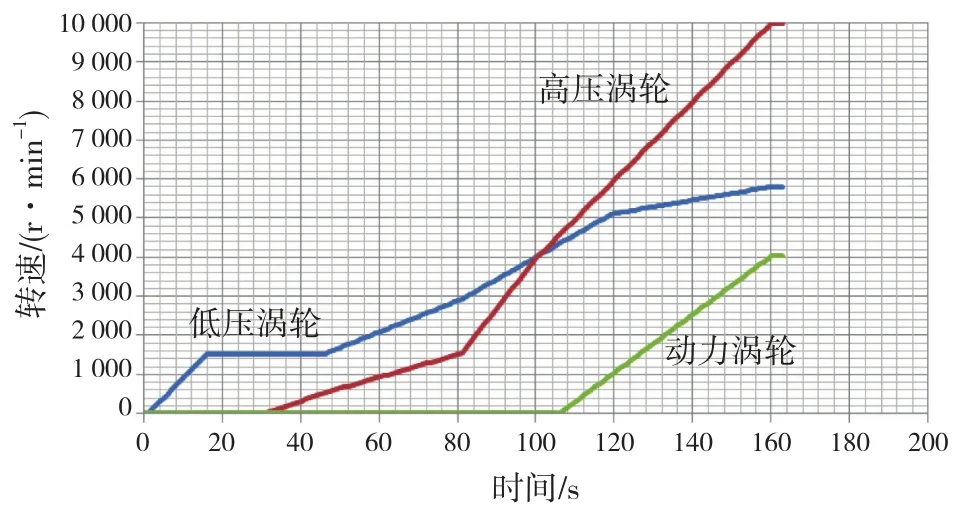
图7 燃机起动过程仿真结果
从图7可以看出,燃机起动过程中低压涡轮先旋转,到一定时间高压涡轮也被带转,最后是动力涡轮被带转,低压涡轮、高压涡轮、动力涡轮转速升高至一定值后保持稳定,即燃机进入慢车暖机阶段。从图8可见,垫升过程刚开始时,燃机功率大于两台风机功率的总和,主要是因为风机轴系的转动惯量较大,功率传递存在一定的延迟效应;但当风机转速稳定在设定值时,燃机的输出功率与两台风机的功率总和基本一致。
3.2 正常航行中变工况模拟仿真
距角,从而模拟气垫船动力系统动态性能。对静水加速航行的仿真结果参见下页图9。
在气垫船正常航行中,常用的操纵方式是保持垫升状态和推进轴系转速不变,仅依靠调节螺距角来实现气垫船加减速。因此本文在正常航行变工况模拟仿真中假设垫升工况不变,推进轴系也维持在某一转速下,在一定时间内以1°/ s的速度增加螺
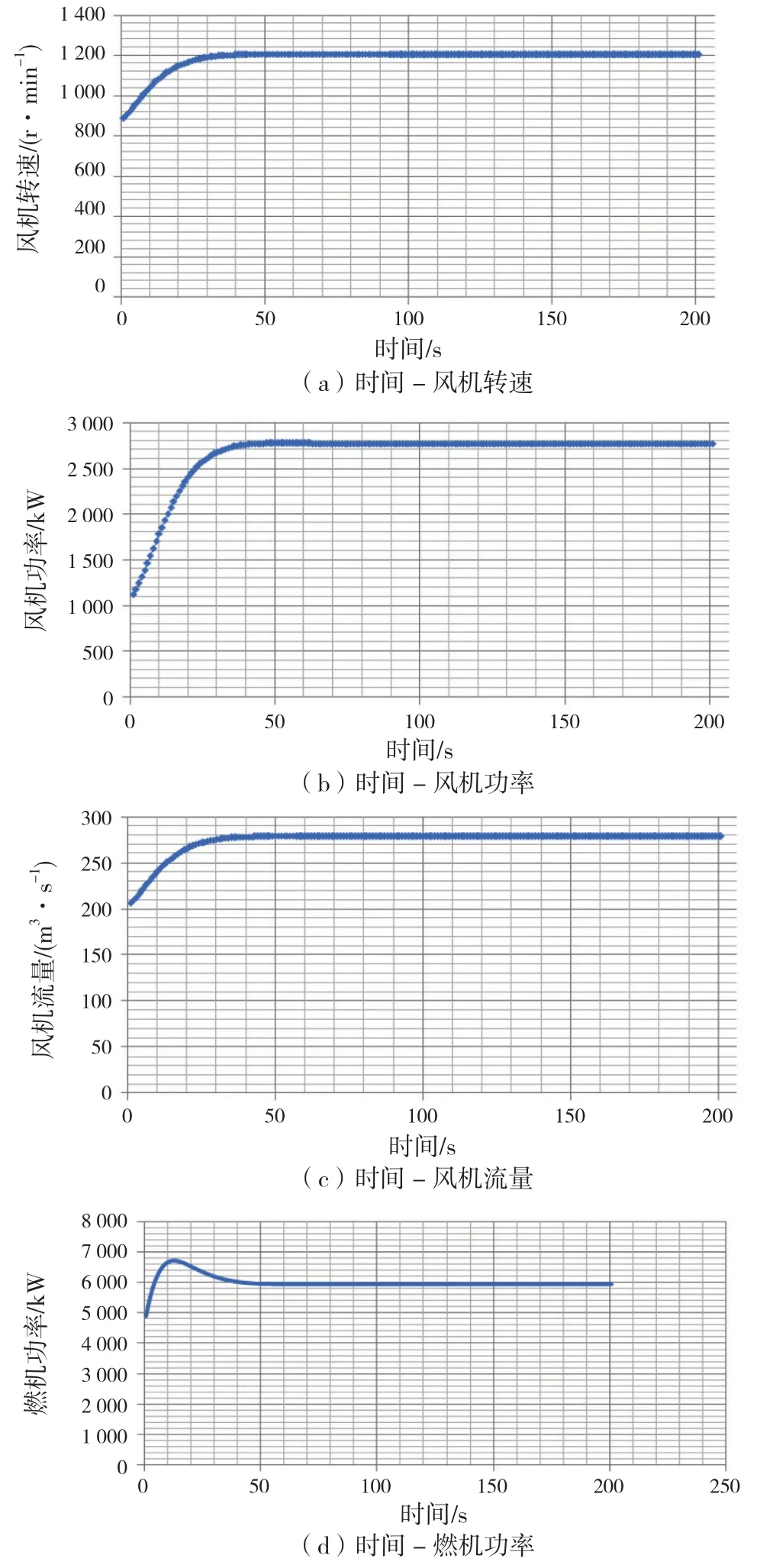
图8 垫升过程仿真结果
图9中两条曲线表示在按1°/ s增加螺距角的操作下,对应的两个不同最终螺距角状态。从图中可见,在增加螺距角后,螺旋桨推力、功率及船的航速都相应增加,且螺距角增加越大,其对应的螺旋桨推力、功率和船的航速也越高。另外,从图中还可以看出,在500 s以下时,气垫船处于低速航行状态;而在600 s以后,航速快速增加,直至对应螺距与推力的稳定航速。其主要是因为气垫船在这段时间内有一个越阻力峰的过程,气垫船只有越出阻力峰后才能达到较高航速。
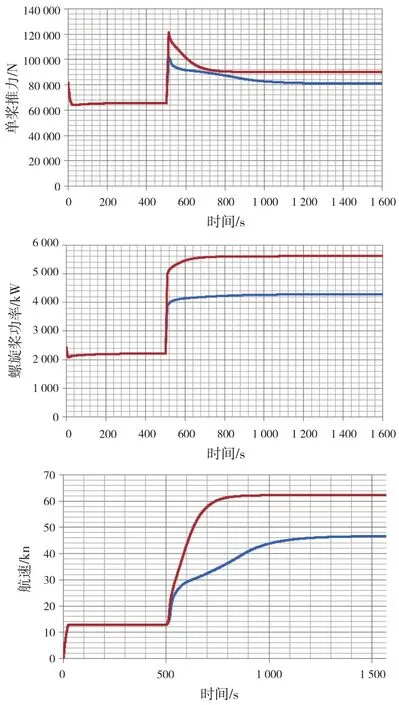
图9 正常航行变工况仿真结果
4 结 论
本文在建立某气垫船动力系统仿真模型,并验证模型准确性的基础上,基于Matlab/Simulink软件,仿真计算该气垫船在起动过程和正常航行中变工况过程的动力系统动态性能。其仿真结果有助于了解该气垫船的动力系统性能,并能对气垫船动力系统控制装置的设计提供一些参考。事实上,气垫船在波浪中航行时的运动模型远比文中采用的模型更为复杂得多。目前对于气垫船动力系统的仿真研究大多采用简单的一维模型,因此,对于气垫船动力系统性能的仿真研究尚有待于进一步加强并完善。
[参考文献]
[1]安卫,陈新传,敖晨阳,等.基于MATLAB/SIMULINK的气垫船动力系统仿真研究[J].船舶工程,2007(1):5-8.
[2]刘春光,马涛.基于SIMULINK的气垫船推进控制系统仿真[J].船舶,2005(1):22-24.
[3]曾豪勇,周思柱,易文君.基于MATLAB的增量式PID参数整定[J].工业控制计算机,2014(6):69-70.
[4]恽良.气垫船原理与设计[M].北京:国防工业出版社,1990:75-106.
[5]马涛,邬成杰.气垫船总体性能与围裙气垫系统流体动力设计[M].北京:国防工业出版社,2012:23-28.
[6]王海燕,胡以怀.轮机系统仿真技术[M].上海:上海浦江教育出版社,2013:21-39.
