无刷直流电动机驱动控制方法研究
2018-04-26赵志芳
赵志芳
(晋中职业技术学院,晋中 030600)
0 引 言
无刷直流电动机采用电力电子器件构成的电子换相方式替代机械换相,因此可以有效提高电机使用寿命,减少运行噪声,并且具有控制简单、调速性能好等优点受到广泛关注和重视。
传统两电平逆变器驱动无刷直流电动机的有位置传感器控制方式,存在转矩脉动大、对功率开关器件耐压值要求较高等问题。本文提出采用中点钳位型三电平逆变器来代替两电平逆变器的方法,并推导出了一种新的基于线电压差值的无位置传感器控制算法,该方法可以有效提高检测精度[1-2]。最后基于MATLAB软件和TMS320F28335硬件控制器结构进行了仿真和实验,结果证实了所述方法的正确性和有效性。
1 三电平逆变器驱动无刷直流电动机分析
采用三电平逆变器驱动无刷直流电动机的接线图如图1所示。

图1 三电平逆变器驱动无刷直流电动机接线图


表1 A相桥臂的开关状态与输出电压关系
2 基于线电压差值的无位置传感器控制
无刷直流电动机无位置传感器检测技术可以降低电机结构的复杂度和硬件成本,受到广泛关注。本文在对无刷直流电动机无位置传感器基于传统反电动势检测分析的基础上提出了线电压差值检测法[3]。
假设A,B相导通,C相关断时,三电平逆变器驱动无刷直流电动机等效电路如图2所示,可得无刷直流电机三相绕组端电压表达式:

图2 三电平逆变器驱动无刷直流电动机等效电路
(1)
式中:uAG,uBG,uCG为三相端电压;UN为中性点电压。
将式(1)两两相减得:
(2)
(3)
(4)
将式(2)、式(3)、式(4)两两相减得:
UAB-UBC=R(iA-2iB+iC)+
(5)
UBC-UCA=R(iB-2iC+iA)+
(6)
UCA-UAB=R(iC-2iA+iB)+
(7)
又有eA+eB+eC=0,iA+iB+iC=0,代入式(5)、式(6)、式(7)得:
(8)
(9)
(10)
C相悬空时,iC=0,由式(10)可得线电压差值UCA-UBC只与反电动势eC有关,其过零点时刻也是反电动势eC的过零点时刻。反电动势与两两导通方式下功率管的导通规律[4]如图3所示。图3中VT1代表Qa1,Qa2导通;VT2代表Qc3,Qc4导通,VT3代表Qb1,Qb2导通;VT4代表Qa3,Qa4导通;VT5代表Qc1,Qc2导通;VT6代表Qb3,Qb4导通。由于线电压差值是相电压的2~4倍,因此可以有效提高检测的精度,其MATLAB仿真分压滤波检测电路如图4所示。

图3 反电动势波形与功率管通断波形关系

图4 分压滤波和线电压输出电路
由图4可见,由于电容滤波的原因,检测到的线电压差值会产生延迟。如果延迟电角度α超过30°,上面介绍的方法将出现较大误差。因此,本文在线电压经过图4的电路滤波延迟α电角度后再延迟90°-α的电角度,得到的线电压的差值与反电动势的波形关系如图5所示。由图5可见,采用上述方法补偿后,UCA-UBC过零点时刻比eC延迟90°电角度。

图5 线电压的差值与反电动势关系
3 无刷直流电动机双闭环PWM控制
无刷直流电动机转速、电流双闭环PWM控制原理[5-6]如图6所示。

图6 无刷直流电动机转速、电流控制原理框图
转速环为外环,电流环为内环,外环将检测到的速度信号与给定值进行比较后,输入至速度调节器ASR,ASR输出值与电流互感器检测到的电机定子绕组电流值进行比较,结果输入到电流调节器ACR中。ACR输出值与三角载波信号比较并通过正、反转逻辑判断后输出驱动功率开关器件的脉冲,实现电机转速的控制。
由以上分析可见,三电平逆变器双闭环驱动控制无刷直流电动机与两电平逆变器基本类似。由于三电平逆变器功率开关器件有12个,其PWM驱动方式将有所不同,如图7所示,采用2个独立的三角载波TP和TN分别控制开关的通断。

图7 三电平逆变器PWM脉冲驱动原理图

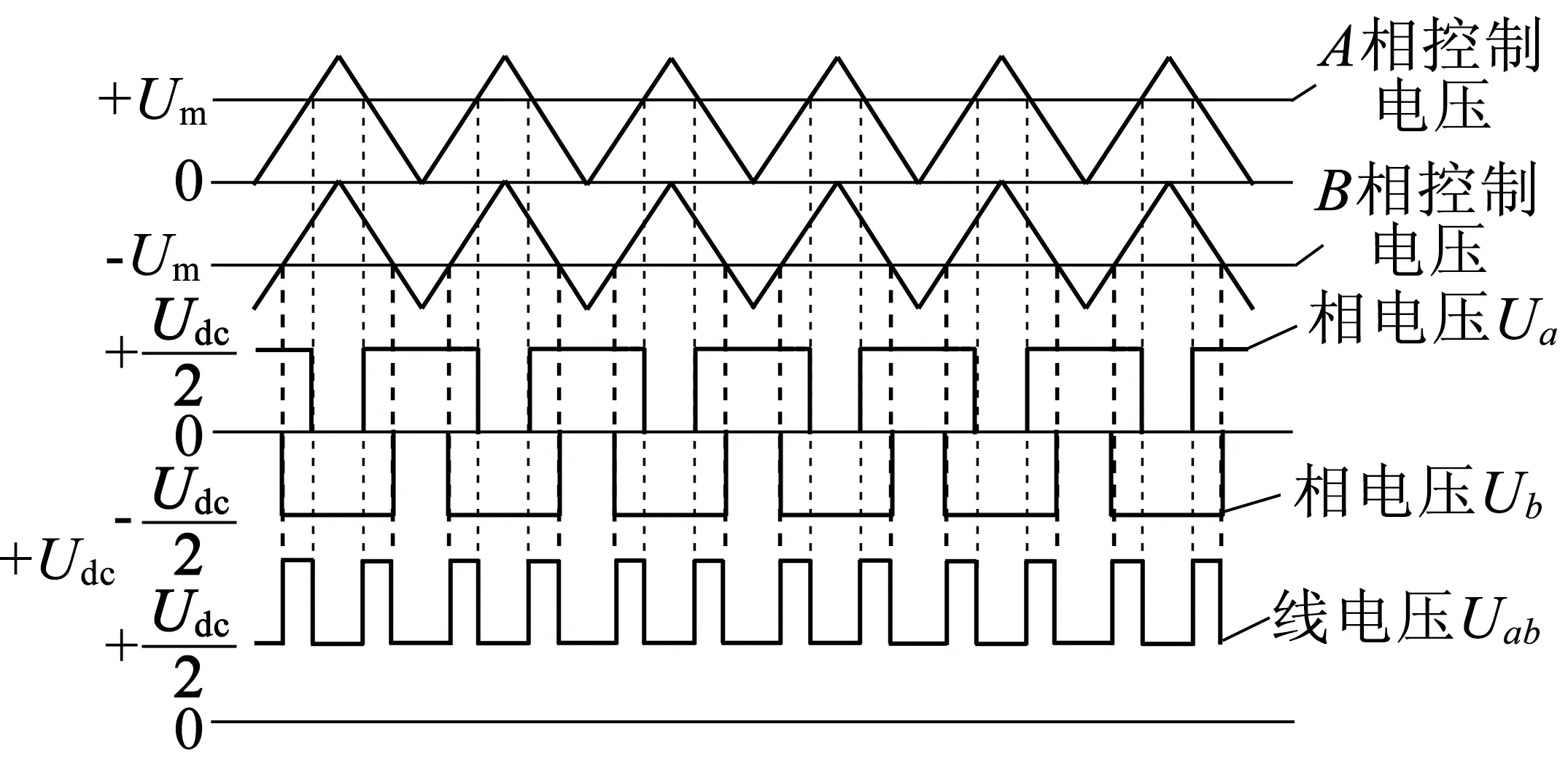
(a)占空比>50%三电平逆变器的相电压和线电压

(b)占空比<50%三电平逆变器的相电压和线电压
4 仿真和实验研究
针对三电平逆变器驱动结构及基于线电压差值的无速度传感器控制方法进行了MATLAB仿真。为了验证三电平逆变器驱动无刷直流电动机的优势,分别搭建了两电平和三电平驱动仿真模型,仿真参数和过程一致系统直流母线电压为500V;0~0.1 s内,电机空载运行;0.1~0.35 s内,电机负载运行,负载大小为3 N·m。A相定子绕组相电流仿真结果分别如图9所示。

(a)两电平逆变器

(b)三电平逆变器
图9(a)是两电平逆变器驱动无刷直流电动机时定子绕组A相电流波形及其放大电流波形,图9(b)是三电平逆变器驱动无刷直流电动机时A相定子绕组相电流波形及其放大电流波形。由图9可见,采用三电平逆变器驱动无刷直流电动机时,起动电流明显低于两电平逆变器驱动方式,且负载时的电流波动也比两电平要小,表明三电平逆变器在抑制转矩脉动方面具有优势。
采用样机进行了实验,控制板采用DSP28335为主控制芯片,三电平逆变器主电路功率开关器件采用IGBT,实验参数如表2所示,实验波形如图10、图11所示。

表2 实验参数
当A,B相导通,C相关断,PWM占空比为25%时,实验波形如图10(a)所示。其中通道1是AB相线电压波形;通道2和通道3分别是A,B相桥臂中性点的电流波形;通道4是直流侧电容中点电流波形。
当A,B相导通,C相关断,PWM占空比为75%时,实验波形如图10(b)所示。其中通道1是A,B相线电压波形;通道2和通道3分别是A,B相桥臂中性点的电流波形;通道4是直流侧电容中点电流波形。
由图10可见,线电压波形与图8分析一致,其幅值波动小,能够有效减小转矩脉动;直流母线电容中点电流波形与A,B相桥臂中性点电流波形之和相一致,且在一个周期内中点电流平均值接近零。

(a) PWM占空比25%

(b) PWM占空比75%
如图11所示,通道1和通道3分别是直流母线电压正、负极波形;通道2是A相电流波形,与图9仿真结果一致。由图10、图11可见,实验波形与理论分析结果一致,证明了所述三电平驱动方案的可行性及控制策略的正确性。

图11 A相电流波形和直流母线电压波形
5 结 语
本文采用三电平逆变器驱动无刷直流电动机的结构及基于线电压差值的无位置传感器控制策略,有效地减少了转矩脉动及电流纹波,提高了无刷直流电动机的控制性能。仿真和实验结果证实了所述控制策略的有效性和正确性,具有良好的工业应用前景。
[1] 倪有源,陈浩,何强.无位置传感器无刷直流电机三闭环控制系统[J].电机与控制学报,2017,27(3):25-31.
[2] 夏长亮,郭培建,史婷娜,等.基于模糊遗传算法的无刷直流电机自适应控制[J].中国电机工程学报,2005,25(11):129-133.
[3] LAI Y S,LIN Y K.A unified approach to back-EMF detection for brushless DC motor drives without current and hall sensors[J].IEEE Trans.on Industrial Electronics, 2006,16(8):1293-1298.
[4] NAM K Y,LEE W T,LEE C M,et al.Reducing torque ripple of brushless dc motor by varying input voltage[J].IEEE Trans. on Magnetics,2006, 42(4):1307-1310.
[5] KOURO S,MALINOWSKI M,GOPAKUMAR K.Recent advances and industrial applications of multilevel inverters[J].IEEE Transactions on Industrial Electronics,2014,57(8):2553-2580.
[6] 史婷娜,肖竹欣,肖有文.基于改进型滑模观测器的无刷直流电机无位置传感器控制[J].中国电机工程学报,2015,8(9):55-56.
