摆角电机伺服驱动器设计
2018-04-26罗东辉
胡 浩,罗东辉
(中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
振镜的光学扫描系统具有高速、高精度、高线性度等优点,因此在激光加工、成像和打印、半导体工程及生物医学系统等领域取得了良好的应用。作为该系统中的核心部分,扫描振镜的性能是系统外特性的关键。而其主要组成部分中的摆角电机及其驱动器则受到了国内外相关行业的重视及投入。当前在此方向处于领先状态的公司机构主要集中在国外,如美国的CTI与GSI振镜,德国的SCANLAB等等。
本文针对此方面的需求设计了一款基于微处理芯片STM32F103控制的摆角电机数字驱动器。根据其工作需求设计了电机工作运动轨迹,对摆角电机进行建模分析,采用经典的伺服控制,并且其工作所需的特殊的运动轨迹设计了相对应的方法。试验结果表明该系统取得了较高的控制精度及性能,满足了产品的需求,且系统具有较强的拓展性,可应用于各种不同的摆动工作系统中。
1 振镜扫描系统整体结构设计
本文所设计的振镜扫描系统主要由3个部分组成,即:摆角电机、角位置传感器与数字驱动器。系统整体框架如图1所示。

图1振镜扫描系统结构框图
由图1可见,扫描系统主要由数字驱动器、摆角电机与角位置传感器等组成。在系统工作时,当嵌入式微处理器收到由上位机送来扫描指令后,开始驱动摆角电机的转子按预定的运动轨迹运动,运动过程中嵌入式微处理器通过对角位置传感器传感的摆镜实际位置和预先设定的理论位置进行误差控制运算,得到相应的控制信号以驱动摆角电机动作,最终使摆镜按照设定的运动曲线运动。
振镜扫描系统中的角位置传感器一般有电容式和光电式两种。电容式传感器由上下极板和中间旋转的介质片组成。结构相对于光电式角位置传感器较为复杂,线性度稍差;介质片是影响传感器精度的关键,目前高性能的介质片价格高、采购困难。由于电容式传感器本身的电容很小,而其因转动而引起变化量更小,对其分辨率有着一定的影响,而且传感器的电路板中各个位置的布线电容、杂散电容和寄生电容都会引起一定的测量误差,这些因素的存在使得电容式角位置传感器并不是本系统的最优选择。
光电式传感器是由光敏元件作为敏感器件来感应角度位置变化的传感器,它具有结构简单、响应快、频带宽、寿命长等优点,相比于电容式角位置传感器,光电式角位置传感器体积更小,旋转部件惯量也更小。这些优点使得其更适用于振镜扫描系统,故本系统采用光电式传感器作为其角位置传感器。
数字驱动器使用了STM32F103系列的ARM芯片作为其主控芯片,它丰富的内部资源可提供系统在复杂伺服要求下高性能的稳定工作,而且还能为摆动系统提供良好的拓展性,可预先设计多种运动轨迹和通信方式以适应各种摆动应用的需求。
2 摆角电机建模
振镜扫描系统中所使用的摆角电机的具体参数如表1所示。
表1摆角电机性能参数

参数值参数值有效扫描角度θ/(°)±20小步长阶跃响应时间t/s≤0.35转动惯量J/(g·cm2)2.4(±10%)力矩系数KT/(N·m·A-1)0.02(±10%)绕组电阻Rs/Ω1.03绕组电感LS/μH350峰值电流IP/A≤25
由摆角电机的工作原理可得:

(1)
T=BlSNISdr
(2)
同时可知电机工作时转矩平衡方程:
T=gθ+Jd2θdt2+fdθdt
(3)
式中:J为电机转子和轴上反射镜片转动惯量之和;θ为电机转子的偏转角度;f为电机内部的摩擦系数;g为扭力棒的弹性系数。
电机电枢平衡方程:
E=RIS+LdISdt+kbdθdt
(4)
式中:R是电枢电阻;L为电枢电感;kb为电机反电动势系数。将式(3)联立可得电机转子偏转角度θ与电枢电流以及电枢电压的关系如下:
IS=gθ+Jd2θdt2+fdθdtBlsNdr
(5)
E=1BlSNdr[Jd3θdt3+(J+f)d2θdt2+(f+g)dθdt+
Rgθ]+kbdθdt
(6)
式(6)经过拉氏变化可得:
H(s)=θ(s)E(s)=KtR(Ls+R)(Js2+fs+g)+KtKbs
(7)
式中:Kt=BlSNdr。
由此可看出,该系统是一个三阶系统,适合采用PID控制。
3 控制策略设计
扫描系统得到图像的质量及效率主要取决于扫描电机在运动过程中的线性度及扫描效率,而线性度取决于摆角电机在运动中速度的均匀程度,扫描效率则取决于电机匀速运动的时间,即电机扫描的角度。本扫描系统设计目标是效率要达到大于80%,普通的全程匀速而进行的等腰三角波型运动在单程扫描模式下并不能实现此目标,故对振镜的运动轨迹有一定的设计,其具体运动轨迹如图2所示。
图2振镜运动轨迹
因为所设计的振镜系统是处于单程工作状态的,所以其有效工作期在其正向运动的时间内。故设计图2中的运动轨迹,振镜来回摆动周期中TS为振镜的正方向运动时间,占周期T的90%,而反向归位时间Tb只占周期T的10%。因此设计了位置电流双闭环PID控制,以控制电机能按所设计的运动轨迹进行运动。双闭环的配合可使摆角电机具有高动态性能,能实现快速起动和制动,减少上升时间,缩小超调量,并且在系统运行时控制其在各个动作点的电流,从而控制转矩使其达到系统要求,按所设计的运动轨迹工作,其具体控制框图如图3所示。
图3控制框图
在图3中,当系统接收到位置信号后,先进入位置环的控制,此时系统会把指令信号与当前位置信号进行比较,然后进行位置PID的计算,得到的位置环输出作为电流环的输入,进而根据位置指令进行输出力矩的控制,因此保证电机输出响应的快速性、灵活性、准确性。摆角电机双闭环伺服设计时,为实现在运动过程各个拐点电机动作的快速性,采用了PD控制作为其电流环控制算法,以保证电流的快速响应;同时为了保证位置跟踪的快速性、准确性、无静差,采用了PID控制作为位置环的控制算法。对于所设计的运动轨迹而言,其中包含两次快速转向,此时对电机输出的力矩有很大的需求。在电机对图2的运动轨迹的跟踪过程中,希望电机在各个运动轨迹拐点处有快速的力矩响应,即在正向扫描的起动时能快速地加速到运动轨迹的平均速度,在到达运动轨迹终点后能最快转向并以最快速度返回起点并减速。同一套PID在这种运动状态下很难达到良好的效果,因此针对它的运动特性,对其运动动作进行划分。根据控制需求分为正向上坡阶段与反向下坡阶段,对两个阶段不同的特点进行了PID参数整定以适应控制需求。综合上述分析与设计,软件实现的流程图如图4所示。
图4软件流程图
软件在启动后先对系统各个模块进行初始化,使其处于准备完毕等待指令的状态。当接收到控制指令后,程序会根据控制目标的不同,对各个控制参数进行针对性的计算及设置,以适应不同的控制目标,保证控制精度。在具体指令跟踪控制时,根据所设计的运动轨迹,程序会主动判断电机是在正方向上坡运动还是反向下坡运动,并根据判断对电机运动过程中的PID控制参数进行调整,以保证电机在起动、刹车及转向时最大力矩输出,以减小超调、提高效率并保证线性度良好。在运动中程序会一直保持判断是否接收到新的指令,以便及时地扫描反应。当系统接收到新指令后会返回到控制参数初始化环节,重新根据工作需求进行控制参数计算及配置;如果没有则继续进行当前旧指令的跟踪控制,并在完成后重复上述步骤,完成软件的有序循环控制。
4 试验结果分析
图5是通过示波器监测到的摆角电机工作状态,横坐标为时间,纵坐标为电压,其中波形2为闭环系统所接受到的位置指令,波形1为摆角电机的角位置传感器的输出,即为电机转子位置。
由图5可见,电机在跟踪既定的运动轨迹时响应速度完全能跟上所设计的运动轨迹,并且没有观测到明显超调。为观测波形的效率及线性度对此波形的某一周期进行分离与放大,具体如图6所示。

图5试验波形
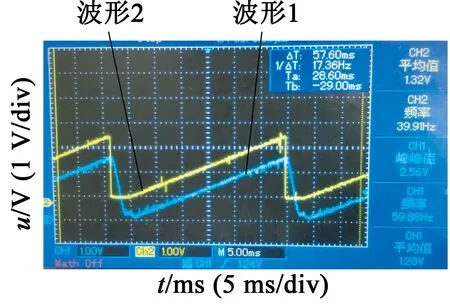
图6试验波形单周期放大图
可见波形1基本符合本文所设计的运动轨迹,其有效工作段,即上升阶段,线性度良好,并且占总周期的83.3%以上,实现了设计目标。
5 结 语
本文讨论了振镜扫描系统的组成及其控制策略的设计,对其运动方式及控制进行了专门设计,最后用试验验证了系统具有较强的伺服性能及稳定性,能够实现振镜扫描系统在实际工作时所需要的性能,对于振镜扫描类产品的研制及发展有很大的帮助。同时因为STM32F103芯片的使用,使得本系统还具有灵活的拓展性,其运动轨迹可根据不同应用进行定制,且通讯方式也能依应用情况进行拓展,使其可以用于各种摆动工作系统中。
[1] 谢凯,李晖,李志芳.基于FPGA控制驱动振镜扫描与数据采集设计[J].电子测量技术,2016,39(4):128-133
[2] 王晓初,朱照杨,张国平.高速振镜伺服驱动的PID加前馈控制[J].微电机,2013,46(5):66-69.
[3] 阮仁秋,丁捷.一种具有角位置信号反馈的振镜驱动电路设计[J].电子世界,2016(9):121-123.
