基于无人机遥感技术的崩岗快速调查方法
2018-04-17,,,
,,,
(长江科学院 水土保持研究所,武汉 430010)
1 研究进展
崩岗是我国南方红壤地区特有的一种土壤侵蚀现象。在《中国水利百科全书》中,崩岗的定义为“在水力和重力的综合作用下,山坡土体受破坏而崩塌和冲刷的侵蚀现象”[1]。崩岗的显著特点就是侵蚀量大、爆发性强,并且发展速度快、突发性强[2]。崩岗在南方红壤地区分布非常广泛,主要涉及广东、广西、湖南、江西、湖北、安徽、福建7省(自治区)的70个地(市)、362个县(市、区),总面积48.34万km2,约占我国国土面积的5.0%,涉及人口1.62亿,约占我国总人口的12.8%[3]。
崩岗调查,是崩岗防治的关键环节之一,需要周期性重复,传统调查方法所需人力、物力和时间成本都非常高,在一定程度上限制了该工作的广泛开展。近年来,遥感与摄影测量技术已经广泛应用于地形地貌信息的采集。尤其是无人机技术的飞速发展,这种高分辨率信息采集技术已经越来越多地应用于水土保持行业,逐渐成为水土保持方案编制和监测等工作的重要手段,同时也为崩岗防治的探索提供了一种新的解决思路。
本文在分析总结传统崩岗调查方法的基础上,提出一种基于无人机遥感技术的崩岗快速调查方法,再通过3组崩岗调查实验验证本方法的可行性和高效性,最后讨论本方法的适用条件和局限性。
2 崩岗测量方法分析
2.1 传统崩岗测量方法
崩岗的形态大小各异,面积最小的可能只有几十平方米,最大的可能高达数十万平方米[4]。崩岗崩壁高度一般为1~8 m,也有>15 m的。当前,对崩岗进行调查的主要方法有人工调查法、插桩法、实时差分定位(RTK)测量法、三维激光扫描法、航片解译监测法5种。
其中人工调查法是最为简单但有效的方法。此方法是在大比例尺地形图上现场勾绘崩岗和崩岗群的位置与形态,并调查崩岗所发生的位置、面积、形态及发育程度等信息[5]。但此方法周期长、人力物力消耗大、成本高,测量数据准确度不高、全面性还有待验证。
插桩法[6]是一组采用测量技术量测土壤侵蚀(或沉积)的方法,主要包括侵蚀针、测平仪、土壤发生和树根出露等方法。以侵蚀针法为例,为了测量崩岗中沟头、沟壁的发育速率,将侵蚀针固定在沟头和沟壁的附近,分别定期监测沟头和沟壁到侵蚀针的距离,从而估算出沟头和沟壁的侵蚀速率。但这些技术受人为因素、客观条件限制,所采集的数据在空间和时间维度上都是离散不连续的,而且其典型性和完整性也无法保证。
差分全球定位系数(GPS)是当前最为常用的监测方法,其定位量测精度可达到厘米级。杜贇等[7]利用CORS-RTK测量技术采集了崩岗基本形态、后退量以及坡度等信息,再通过GIS空间分析方法对比不同时刻的采集数据获得该时段崩岗侵蚀的变化量。但实现操作中外业人员需逐点测量,再加上崩岗地形陡峭,作业危险性大,有些关键点无法获取,不适合大范围的崩岗监测。
2.2 崩岗测量新方法
三维激光扫描仪是1990年后出现的一种高精度测绘设备。与传统测量技术相比,三维激光扫描仪的工作效率和精度都有大幅提升,最高扫描精度可达2 mm,非常适用于对小区域进行高精度数字高程模型(DEM)采集[8]。刘希林等[9-10]使用三维激光扫描仪进行了一系列崩岗侵蚀的定位监测,对所采集的点云数据进行了深入的崩岗侵蚀时空分析。但三维激光扫描仪存在扫描面积小,且容易因地形地物遮挡,出现信息黑洞的问题,对崩岗顶部或侧面的采集效果不太理想。
航片解译监测法[11]是通过立体卫星遥感影像进行摄影测量分析,三维重建生成DEM,再通过相减计算得出两时刻的DEM之差,获得该时段发生的侵蚀量。该方法虽然高效、简便、易于周期监测,但是当前民用卫星影像的水平分辨率最高是0.41 m(GeoEye-1),三维重建后高程精度误差至少在5 m以上。对于发育缓慢、形态上变化小的崩岗,如每年沟头前进速度只有几十厘米的,航片解译监测法就无法满足崩岗测量对于空间尺度的需求。
综上所述,上述传统崩岗调查方法,在空间(时间)分辨率、监测范围、效率、成本等方面各有不足。无人机航拍可在短时间内获得大范围厘米级的地表影像,并通过摄影测量技术完成三维重建,可以将大部分外业测量工作转化到室内,极大地降低了作业成本。本文将尝试采用无人机遥感技术结合人机交互判读进行崩岗调查工作,为崩岗调查提供了一种新的思路。
3 基于无人机遥感技术的崩岗调查方法
3.1 基本原理
根据早期崩岗调查项目资料、相关文献及标准,崩岗作为一种严重的水土流失侵蚀地貌,调查主要以其整体和各组成部分的长度、坡度、面积、体积等一系列可量测的空间信息内容为主,如崩岗发生的位置、类型、形态特征、崩岗面积、影响崩岗发育的诸因素等。而其他非空间信息调查内容,如崩岗危害和防治现状等,则通过从相关部门和当地政府收集相关统计资料和工作报告填写。
基于无人机遥感技术的崩岗调查方法的关键步骤是对指定区域的崩岗进行规划航线的无人机航拍,再将所采集的影像通过摄影测量学中的空中三角测量和测量平差方法解算出空间点云,进而三维重建出该崩岗地貌,生成数字正射影像图(DOM)、数字表面模型(DSM)和三维模型,最后模型量测和人机交互判读完成崩岗调查表(图1)。

图1 基于无人机遥感技术的崩岗快速调查步骤Fig.1 Steps of rapid investigation on slope collapse byunmanned aerial vehicle remote sensing
本方法的优势是将野外的崩岗地貌通过无人机遥感技术和摄影测量学方法转化为虚拟的三维模型数据,将野外繁重的测量工作转移到室内使用计算机软件测量完成。
3.2 适用范围
本方法采用无人机航拍,安全飞行和拍摄效果是两大关键问题。限制条件主要包括军事设施范围和机场不得飞行,降雨、降雪、雷电、起雾、大风等恶劣天气不得飞行。
本方法不适用于崩壁过于陡峭狭窄的、植被非常茂盛的和已是平衡趋稳期、植被恢复很好的崩岗。
3.3 技术要点
3.3.1控制点布设
利用无人机记录的GPS信息可以完成三维重建计算,但由于无人机GPS定位误差高达10 m级以上,虚拟三维模型的绝对精度将不会太高,但相对精度还比较高。如果为了提高三维重建精度,可适当布设一定数量的高精度控制点,将其作为空中三角测量和测量平差的基础数据。如果精度要求不高,或野外条件不允许,可不布设控制点。
3.3.2影像重叠度和航拍高度设定
影像重叠度和航拍高度也是直接影响三维模型精度的因素。影像重叠度越高,模型精度和三维效果越好。其中,航向重叠度只与快门曝光间隔有关,不影响航线范围,建议可以设置为75%及以上。旁向重叠度,将影响2条相邻航线的距离和整条航线的航拍范围面积,建议航向重叠度不低于60%即可。航拍高度决定影像的空间分辨率,应该根据任务要求和无人机相机参数综合确定。
3.3.3三维模型重建
利用无人机影像拼接建模软件,首先基于影像的GPS信息形成粗略的影像空间阵列,并将控制点导入标绘到每张影像,然后搜索与匹配影像中同名像点,平差解算精确的外方位元素,接着利用空中三角测量和测量平差生成空间密集点云数据,构建不规则三角网(TIN)表达崩岗地形,最后通过点云的颜色生成纹理重建崩岗模型。本过程中控制点标绘精度要高,处理过程中的精度选择最好选择“高”。
3.3.4人机交互判读与模型量测
对于崩岗地貌定性方面的调查内容,如崩岗类型、发育情况等,可直接通过目视判读崩岗三维模型完成。而对于定量测量方面的调查内容,如崩岗面积、崩塌量、汇水面积、主沟长度等,就得通过计算机软件在三维空间里对崩岗进行量测或使用从三维模型导出的DOM或DSM进行勾绘再计算统计获得。
3.4 方法步骤
3.4.1航线制定
针对崩岗调查任务,首先收集所在区域的高分辨率卫星遥感影像或直接从谷歌地球查看需调查崩岗或航拍区域的大概地形地貌及交通情况,预设航线范围、航拍高度、飞行起降点等。然后,在无人机地面站软件或者航线规划APP里,设计并保存制定的航线。最后,查看天气预报,选择合适的天气,确定具体航拍时间。
3.4.2设备准备
设备包括硬件和软件2类。其中,硬件设备包括无人机、IPAD、GPS RTK或手持高精度GPS、高配置笔记本工作站等。软件包括Dji GO、航线规划APP Altizure、无人机影像拼接软件Agisoft Photoscan、ArcGIS等。在航拍出发前,适当地调试硬软件,确保硬件设备电量充足,存储空间足够,软件使用正常。
3.4.3外业航拍
在确定的航拍范围内或附近,现场选择视野开阔的无人机飞行起降点,特别要注意树木和山体遮挡、高压线、水域等情况。避免在雨、雪、雾、雷电等恶劣天气作业。打开无人机地面站软件或者航线规划APP中的预设航线,调整参数,确定实际飞机航线。安装调试好无人机硬软件后,执行全自动航线拍摄任务,并随时注意无人机位置和状态,直到整个飞行任务结束。同时,根据精度要求,在航拍范围以内采集一定数据的控制点,一般不得少于4个。
3.4.4数据处理
①将航拍影像和控制点整理归类,再按拼接区域导入无人机影像拼接软件Photoscan进行处理。自动拼接前,需手动在航拍影像上标注控制点,以提高拼接建模精度;②形成照片阵列,对齐照片,自动搜索和匹配照片中的同名像点,同时估算出每张照片拍摄时的姿态,并对相机参数进行校正;③基于估测出的相机位置和照片,通过空中三角测量,建立照片像素密集点云;④基于密集点云,重建三角网,并生成纹理,还原崩岗地貌模型。对此虚拟三维模型可导出DSM和DOM。
3.4.5计算坡度和对象勾绘
利用ArcGIS软件将崩岗范围内DSM进行坡度计算,生成坡度图。
对DOM中崩岗区域进行矢量化,用线状符号勾绘出各条切沟和主沟道的长和宽,用多边形勾绘出崩岗区域、汇水区域、冲积扇区域以及植被。
3.4.6人机交互判读填写表格
根据前面处理得到的坡度图、勾绘出的各类对象以及虚拟三维模型,可人机交互综合解译,判读出崩岗形态、崩岗类型,估算出崩岗面积、崩塌量、汇水面积、冲积扇面积等信息,完成崩岗调查表的填写。
4 案例分析
本文以通城县大坪乡坪山村的3处崩岗为例,验证本方法的可行性和有效性,该崩岗大致位于113°48′E,29°18′N附近。
4.1 研究区概况
通城县地处湖北省东南端,湘、鄂、赣交界部位,114°E,29°10′N附近。地形为北面开阔,东、西、南环山,属于丘陵盆地。通城县位于北半球中纬度,属亚热带季风气候,四季分明,气候温和,雨量充沛。年平均气温15.5 ~16.7 ℃,无霜期为258 d,年平均降水量为1 450~1 600 mm。通城县区域土壤大多为花岗岩母质发育的红壤,土壤结构松散,水土流失情况严重,特别是崩岗侵蚀广泛。
4.2 工作过程
内业准备工作花费3 d,主要收集崩岗危害和防治现状等相关资料,根据崩岗调查范围在谷歌地球上查看的地形地貌,计划行程路线,并在航线规划APP Altizure上选择航拍区域、预设航线及相关参数,调试软硬件设备完成充电工作等等。
野外航拍工作耗时1 d,时间为2016年9月6日,天气晴朗。本次实验使用四旋翼无人机——大疆精灵3 Pro。大疆精灵3 Pro质量小、携带方便,单兵作战能力强,故采用该设备独自一人便可开展野外作业。
为保证飞行安全,综合考虑影像精度和航拍覆盖范围,3个架次航线均设计为长500 m左右,宽200 m左右,飞行高度150 m左右,来回2次航向重叠率70%,旁向重叠率60%,航拍参数与成果信息如表1所示。航拍影像为4 000×3 000 px,带GPS信息。通过Photoscan v1.2.6拼接和重建花费3 d,生成的DOM、DSM和三维模型等数据成果如表2所示。其中,汇水面积范围标记在DOM上,主沟位置标记在三维模型上。
利用Photoscan的DOM、DSM和三维模型查看和量测功能,可人机交互式放大、缩小和旋转,从任意角度和尺度直接观察崩岗对象,并对长度、面积和体积等信息进行测量,完成表3的填写。

表1 航拍参数与成果信息Table 1 Parameters and results of aerial photography
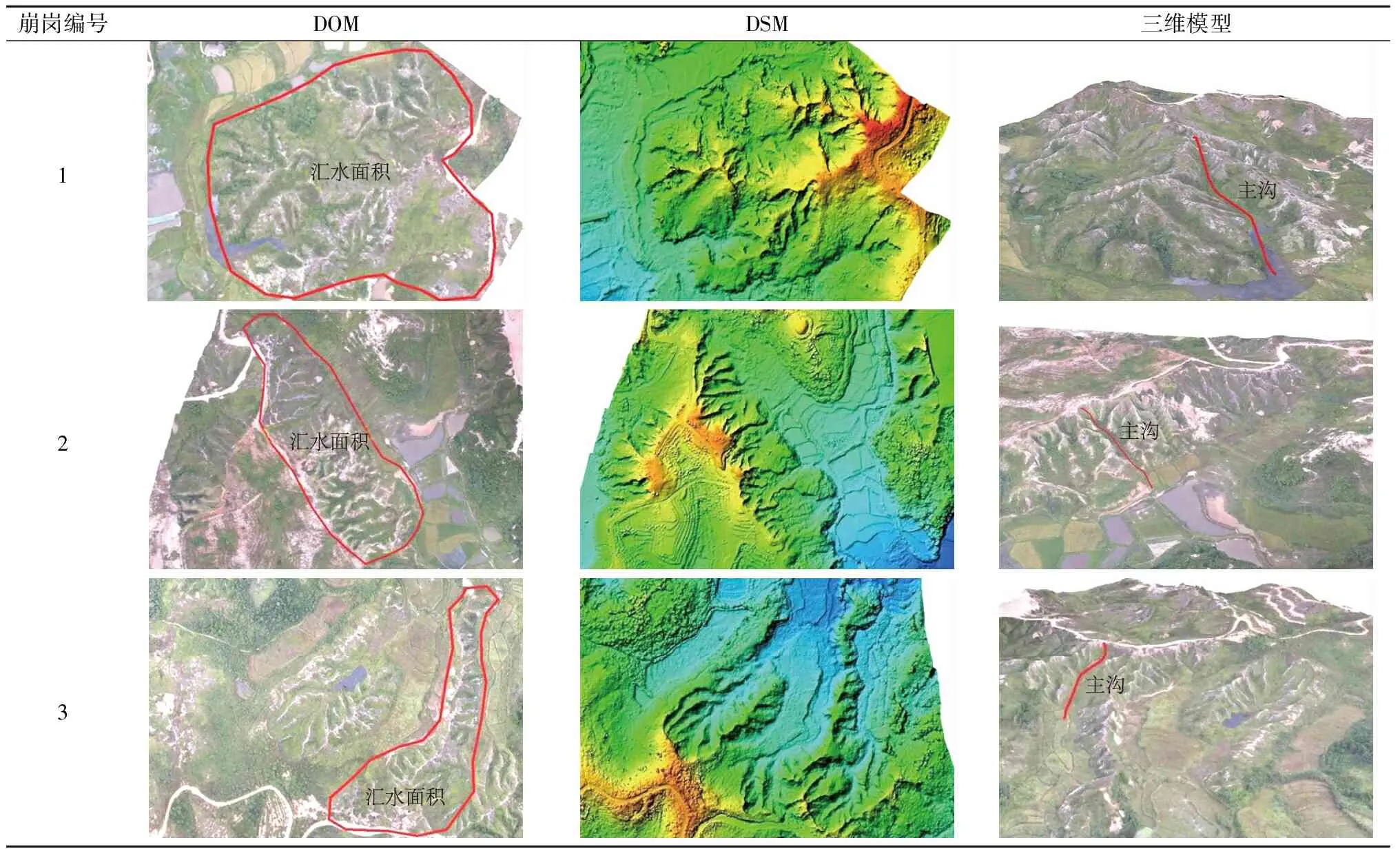
表2 数据处理成果Table 2 Data processing results

表3 崩岗调查成果Table 3 Results of slope collapse investigation
4.3 分析讨论
通过上面3组实验处理获得了崩岗区域高精度的DOM、DSM和虚拟三维模型,通过人机交互式判读可完成崩岗调查表中空间信息内容的填写,能够满足当前大部分资料中对崩岗调查的要求。
从带纹理的三维虚拟模型判读空间对象,就如同从上帝视角观察看世界,不需要像解译遥感平面影像一样建立解译标识库,就可以非常直观地进行判读,甚至比在野外实地调查还要方便、简单。
4.3.1信息量
通过DOM、DSM和虚拟三维模型,可以定量地量测出崩岗及各组成部分的长度、坡度、面积、体积等,也可以定性地判读出崩岗发生的位置、类型、形态特征,提取调查所需的空间信息内容。
4.3.2精度
从3组实验可以看出,在航拍高度为150 m左右时,DOM精度可达7 cm左右,DSM精度可达14 cm左右,三维模型的精度可达7 cm左右,足以满足崩岗调查数据量测精度的要求。
4.3.3效率
本方法对人员需求少,工作效率高。外业航拍时,大疆精灵3Pro质量轻,一次可带4块电池,一个背包可装整套设备,携带方便。可单兵行动,效率高,野外实施一个架次航拍从准备到完成收拾设备不超过半小时。
4.3.4成本
传统崩岗调查主要成本在于外业,包括仪器设备携带和运输费用、调查人员的差旅费。本方法将大部分测量和判读工作转化到室内,在计算机软件上进行,外业只进行航拍获得影像,极大地降低了成本,同时也避免了野外测量的危险性。
5 结论与展望
本文在分析总结传统崩岗测量方法的基础上,提出了一种基于无人机遥感技术的崩岗快速调查方法,通过3组崩岗调查实验验证本方法的可行性和高效性。与传统崩岗调查方法相比,本方法在保证任务质量和数据精度的情况下,能将大部分的外业测量和调查工作转化到内业完成,并只需要一个人去外业即可,且所需时间短,效率高,极大地降低了崩岗调查工作的成本,具有明显的优势,值得推广应用。
下一步工作将考虑机载激光雷达技术去除地面植被影像开展更深入的研究,并结合控制点进行崩岗形态变化监测。
参考文献:
[1]唐克丽. 中国水土保持[M]. 北京: 科学出版社, 2004: 80-82.
[2]梁音, 宁堆虎, 潘贤章, 等. 南方红壤区崩岗侵蚀的特点和治理[J]. 中国水土保持, 2009, (1): 31-34.
[3]刘洪鹄, 刘宪春, 张平仓, 等. 南方崩岗发育特征及其监测技术探讨[J]. 中国水土保持科学, 2011, 9(2): 19-23.
[4]吴志峰, 王继增. 华南花岗岩风化壳岩土特性与崩岗侵蚀关系[J]. 水土保持学报, 2000, 14(2): 31-35.
[5]冯明汉, 廖纯艳, 李双喜, 等. 我国南方崩岗侵蚀现状调查[J]. 人民长江, 2009, 4(8): 66-68, 75.
[6]LOUGHRAN R J. 土壤侵蚀测量方法[J]. 徐刚,译.水土保持科技情报, 1994, (2): 54-57.
[7]杜贇, 李双喜, 丁树文, 等. 基于CORS-RTK结合GIS的鄂东南崩岗侵蚀监测[J]. 人民长江, 2015, 46(12): 87-90.
[8]王一峰, 张平仓. TLS在建立高精度DEM中的应用[J]. 长江科学院院报, 2008, 25(3): 104-106.
[9]刘希林, 张大林. 崩岗地貌侵蚀过程三维立体监测研究——以广东五华县莲塘岗崩岗为例[J]. 水土保持学报, 2015, 29(1): 26-31.
[10] 刘希林, 张大林. 基于三维激光扫描的崩岗侵蚀的时空分析[J]. 农业工程学报, 2015, 31(4): 204-211.
[11] 刘震. 水土保持监测技术[M]. 北京: 中国大地出版社, 2004.
