浅析轮式移动机器人与四翼无人飞行器
2018-04-13王荷
王 荷
(沈阳市第二十中学,沈阳 110002)
1 轮式移动机器人
1.1 轮式移动机器人简述
轮式移动机器人是出现较早的一种机器人,主要通过传感器感知外界环境,控制系统作为控制中心对机器人的行为进行自动控制,并通过遥控操作器遥控,它融合了微电子技术、信息与通信技术、机器人技术等,能够适应复杂的工作环境,既可以听从人类的指示而进行操作,也可以根据提前在其系统内设定的程序进行运行,是一种自行执行工作的机器装置。它在某些特定的工作场合能帮助或代替人类的工作,例如在工业生产线上、医疗领域或者危险的环境。
1.2 轮式移动机器人的发展
移动机器人是在上世纪中期第一次出现在人类视野,起初是为了完成在月球表面的探测,美国的“探测者”3号通过地面的远程遥控,实现了在月球上挖沟及其他任务。后苏联实现了在无人驾驶的情况下,将“登月者”20号安全着陆,而且顺利的带回了月球表面的土壤、岩石样品。而为了适应各种人类难以完成的工作,移动机器人的使用越来越广泛,例如适合海洋开发及探测的水下机器人、适应原子能利用的极限机器人、工厂自动化机器人等等。不同的轮式机器人具有不同的特点,适合不同的工作环境,轮式移动机器人有两轮式、四轮式、履带式、全方向式等。基于履带式移动坦克机器人牵引力良好,地面承载压力低,可以在崎岖的地面拿起被操作对象;三独立马达100mm全向轮机器人,通过安装的全方位编码器及微控制器,能实现在不改变方向的情况下,只改变每个车轮的方向和速度就可以向各个方向移动,且这种机器人上配备传感器使其适用于监视和运输。可以说不同的轮式移动机器人由于其应用环境和应用方向的不同使其移动方式、研究方向差别很大。
1.3 轮式移动机器人的工作原理
轮式移动机器人按车轮的数量可分为二轮、三轮、四轮、六轮及多轮机构,不同的机构具有不同的特点及设计原理。例如二轮机构结构较为简单,但其在静止或速率较低时很不稳定,而三轮机构可实现零回转半径,四轮机构因其结构使其运动较为稳定。
对于轮式移动机器人来说,设计的关键包括如何设计合适的机器人的体系结构,机器人感知并接受外界信息的方式,通过何种方式控制移动机器人使其移动及机器人的路径规划。对于机器人的体系结构,根据机器人的感知外界环境、分析决策等不同的功能将其分为分层递阶结构、行为系统、黑板系统三种系统结构。信息感知是指机器人通过各种传感器感知外界并接受信息,包括激光扫描、摄像机、压敏传感器、声音传感器、红外传感器等,主要在机器人行进过程中对障碍物进行检测。实现机器人的控制则是根据机器人几何中心或轮轴线中心的时间微分方程的运动学模型进行建模,然后结合传感器接收到的信息进行定位,通过神经网络的学习和容错能力对机器人进行控制,移动机器人的控制系统是其执行结构,对机器人能否准确的完成任务起着关键性的作用,而机器人的控制系统是由轮式移动机器人的本体结构、控制方式及所要达到的功能决定。路径规划则是使轮式机器人能够自主运动的关键。
2 四翼无人飞行器
2.1 简述四翼无人飞行器
无人机是指可以自备程序自主飞行或通过遥控飞行的不载人飞行器,它利用空气动力来克服自身重量,且本身具有动力装置,可一次性或多次回收利用。无人机机动性高,隐蔽性好,可以执行多种任务并且生存能力强,因此受到各国广泛的关注及重视。四翼无人飞行器是无人机中的一种,它以四个旋翼作为动力装置,能进行垂直起降,它的四只旋翼分别对称安装在飞行器的前、后、左、右四个方位作为飞行的直接动力源,这四个结构和半径都相同的螺旋桨位于同一平面高度且呈螺旋交叉,其中位于不同直线的两对旋翼分别沿顺时针和逆时针方向旋转。四翼无人飞行器从刚诞生至现在,因其在民用领域、军事领域、航空领域等都有广泛的应用前景,因此一直是各国研究的热点。
2.2 四翼无人飞行器的发展
20世纪初,法国科学家制造了一架旋翼式直升机,这架直升机体积小,而且没有驾驶员,但通过多次尝试,最终并没成功,但为后面飞机的发展奠定了基础。在接着的很长的一段时间里有很多科学家都尝试改进四旋翼飞行器,但并没有成功。而二十一世纪以来,计算机技术有了很大的发展,同时各种传感器相继出现使得四翼飞行器再次进入人们的视野。而现在四翼无人飞行器由于其体积小,成本低,且在对如室内、丛林等进行监测,因此其在无论是军事方面、娱乐领域,还是民用方面的应用前景都很广阔。目前四翼无人飞行器可以在具有简单约束的环境中实现自主飞行,但如何在复杂的环境中实现自主飞行仍是各国研究的重点。在2007年麻省理工研制的四翼飞行器可以通过激光扫描对周围的环境进行感知,然后接受信息后重建并自主规划路线,实现了对运动车辆进行检测与追踪。
2.3 四翼无人飞行器的工作原理
传统的飞机是通过舵机使螺旋桨的桨距角改变而改变飞机的姿态和位置,而四翼无人飞行器则是通过改变四只旋翼的转速,使升力发生变化从而控制飞行器的起降。但以这种方式使升力发生变化而产生的动力并不能支持飞行器长期飞行,所以为了使飞行器实现长距离飞行,就必须存在一种控制方法可以长期形成动力。当四个旋翼旋转的转速相同时,通过各个旋翼旋转方向或速率的不同,可以相互间平衡了反扭力矩,以使飞行器实现静止、侧翻、前后、偏航等各种飞行动作。如图1为四翼无人飞行器的基本结构图:
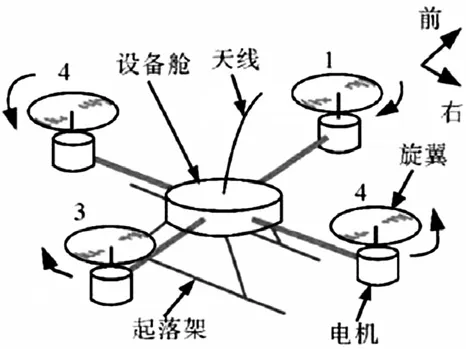
图1
四个旋翼位于十字形机体的四个顶点位置,1、3旋翼为顺时针旋转,2、4旋翼为逆时针旋转,当2、4旋翼转速不变,而1、3号旋翼转速增加或减小时,可以实现无人机的偏航;而当1、3号旋翼速度不变,2号旋翼转速减小,4号旋翼转速增加,无人机将向右飞行,反之2号旋翼转速增加4号减小,则向左飞行;当四个旋翼转速相同并使产生的合推力与机体重力相同,则无人机将在空中的某一高度呈相对静止的状态。这是四翼无人飞行器实现飞行动作的基本原理,在飞行过程中会通过传感器实时感知外界环境变化传给控制系统,控制系统将接收到的信息进行计算、分析,再将信息反馈,从而控制飞行器飞行、加速、避障。
3 轮式移动机器人与四翼无人飞行器优缺点分析
轮式移动机器人与四翼无人飞行器都属于智能化的机器人,它们是科学进步的标志,也使人类生活方式有了很大的改变。轮式移动机器人主要用于地面,通过自主的地面运动去实现目标,而四翼无人飞行器则主要在通过空中飞行去完成任务,它们所处空间的不同,任务目标不同,导致它们自身结构有很大区别,功能方向有很大的不同。它们同样是计算机技术与机械、电子、信息技术等的结合,通过传感器感知外界,控制系统自主决策或人为控制,不同的应用方向使得它们的优缺点也不同。
轮式移动机构是在救灾机器人中最为常见的一种,这种机器人一般机构较为简单,运动速度快而工作效率高,控制方面通过简单的编程就可以达到高的可靠性,因此控制较为方便,同时对能量的利用率高,机动性能好,而且在很多方面可以借鉴较为成熟的汽车设计技术,但其适应能力和越野性能较差。轮式移动机器人在移动过程中,因其只可固定在同一平面上而难以上下调整,所以导致其适应力较差,使其存在一定的局限性,在通过不光滑的地面时运动能力受到了限制,尤其是在如沼泽、沙地、雪地这种软性地面时就容易打滑甚至沉陷。而四翼无人飞行器,重量轻,飞行速度可达每秒几米到几十米,因其体积小,可以钻到建筑物或洞穴里,隐蔽性强,可以在多空间使用。四翼无人飞行器结构简单,成本低,在执行侦察任务时,即使在复杂的环境也可以对细小的环境进行勘察并将目标的准确实时的信息反馈回来,因此在环境检测、巡视、测绘、交通道路监控、航空摄影、搜救等方面都有很大的应用前景。
4 总结语
轮式移动机器人与四翼无人飞行器都是高科技下的产物,也是人类科技不断进步的标志,它们都为人类生活带来了很大的便利和改变。美国国家科学委员会曾预言:“20世纪的核心武器是坦克,21世纪的核心是无人作战系统。”智能化的机器人为人类参与到人类生活的方方面面,但尽管已经有了很大的发展与进步,但还是存在一些没有攻克的难题亟待解决,相信未来它们会为我们带来更多的便利。
[1] 柳洪义,宋伟刚.机器人技术基础[M].北京:冶金工业出版社,2002.
[2] 王树刚.四旋翼控制问题研究[D].哈尔滨工业大学,2006.
[3] 祖莉,王华坤.智能移动机器人运动控制系统及算法的设计[J].机器人技术与应用.
