无线电罗盘导航基准算法研究
2018-04-13张鹏强赵杨
张鹏强,赵杨
(中国飞行试验研究院,西安 710089)
0 引言
机载电子设备鉴定试飞期间,针对被试对象性能的考核,需要给出测试基准进行参考,测试基准是机载电子设备鉴定试飞的性能考核依据。如导航设备试飞需要给出基准方位和距离信息;话音试飞需要给出话音质量评分标准;无线电高度表试飞需要光电经纬仪提供的基准高度;惯性导航设备试飞需要差分GPS提供高精度的位置信息等。基准数据提取方法的确定是试飞方法设计、事后数据处理的前提。
本文以无线电罗盘导航为例,对飞机定型试飞中无线电罗盘性能的基准设置方法进行研究,给出了以卫星导航数据为基准的试飞基准算法。
1 无线电导航系统介绍
无线电罗盘是一种机载电子设备,该设备工作频段:190~1750kHz,与地面导航台配合组成远距离导航系统(最大作用距离 350km),为飞机提供相对于地面导航台的方位信息。
该系统由两部分构成:
(1)地面导航台:NDB(Non-Directional Beacon)导航台(包括近台、远台各一个)。它通常位于跑道延长线上;
(2)机载设备:机载无线电罗盘(ADF,Automatic Direction Finding)。
2 考核方法
2.1 罗盘基准方位
机载无线电罗盘的主要功能是定向,给飞行员提供飞机相对于地面导航台的航向信息,指示机场方位。飞行试验中,为完成机载无线电罗盘的鉴定试飞,必须得到无线电罗盘的基准方位。
依据无线电罗盘的定向原理,无线电罗盘方位由飞机相对于导航台的方位与飞机的真航向决定,如图1所示。即:

其中,飞机方位通过坐标变换得到;飞机真航向通过机载惯性导航设备输出得到。飞行试验中,为提高飞机的位置精度,通常事后对GPS数据进行差分处理,进而提高飞机方位数值的精确度。
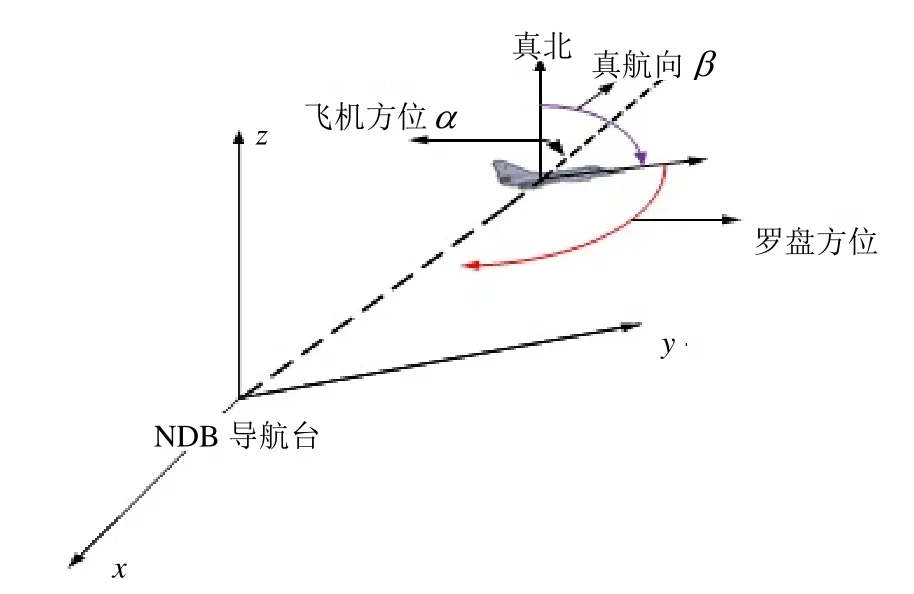
图1 罗盘基准方位
2.2坐标转换
由于飞机和导航台的位置信息(经度、纬度和高度)是在大地坐标系下取得的,为计算方位,必须将飞机和导航台的位置信息其转换为地心空间直角坐标系下的位置信息。地心空间直角坐标系下的飞机和导航台位置信息彼此独立,为得到飞机相对于导航台的方位、仰角和距离信息,必须将飞机在地心空间直角坐标系下的位置信息转换为以导航台位置信息为原点的站心直角坐标下的位置信息。因此,坐标转换包括大地坐标到地心直角坐标的转换和地心直角坐标到站心直角坐标的转换。
(1)大地坐标系到地心空间直角坐标系的转换
大地坐标系是大地测量中以参考椭球面为基准面建立起来的坐标系。地面点的位置信息用大地经度、大地纬度和大地高度表示。
地心空间直角坐标系与地球椭球无关,它是以O-XYZ建立起来的坐标系。其中,原点O与地球质心重合,Z轴指向地球北极,X轴指向经度原点E,Y轴垂直于XOZ平面构成右手坐标系。地面点的位置信息用X、Y和Z表示。
假定飞机或导航台在大地坐标系下的卫星定位信息为经度B、纬度L、高度H,通过式(2)进行换算得到对应于地心空间直角坐标下的位置信息。
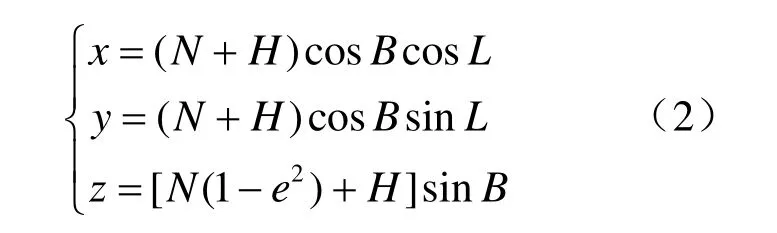
式中,N为地球椭球的卯酉圈半径;e为椭球的第一偏心率;
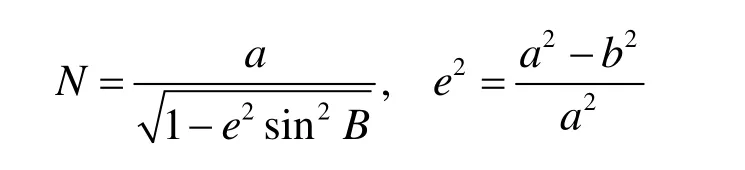
其中:a和b分别为椭球的长半径和短半径,a=6378137m,b=6356752.3142m。
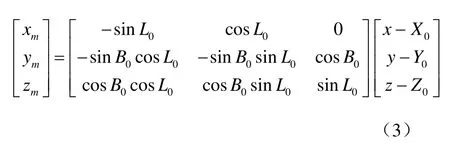
(2)地心直角坐标到站心直角坐标的转换
站心直角坐标系也叫做站点坐标系、东-北-天坐标系ENU。其中,原点O为站心(如导航台),Z轴与椭球法线重合,向上为正(天向),Y与椭球短半轴重合(北向),X轴与地球椭球的长半轴重合(东向)。相对于站心的某点位置信息用xm、ym和zm表示。
假定由(1)分别得到飞机和导航台在地心空间直角坐标的位置信息代入式(3)中得到以导航台位置信息为站心,飞机在站心直角坐标系下相对于站心的位置信息
在方位计算时,由于飞机位置在X-Y平面投影象限不同,要区别计算。
2.3 飞机方位计算
飞机方位角定义:X-Y平面内,以Y轴(真北0°航向)为起点,顺时针旋转,到达飞机与坐标原点连线(方位线)的角度。假定已知飞机在X-Y平面第1象限的投影值则飞机方位角为:
在站点坐标系下,飞机位置信息在X-Y平面的投影值在正北(0°航向)、正南(180°航向)、正东(90°航向)、正西(270°航向),则飞机方位值即为航向指示值;
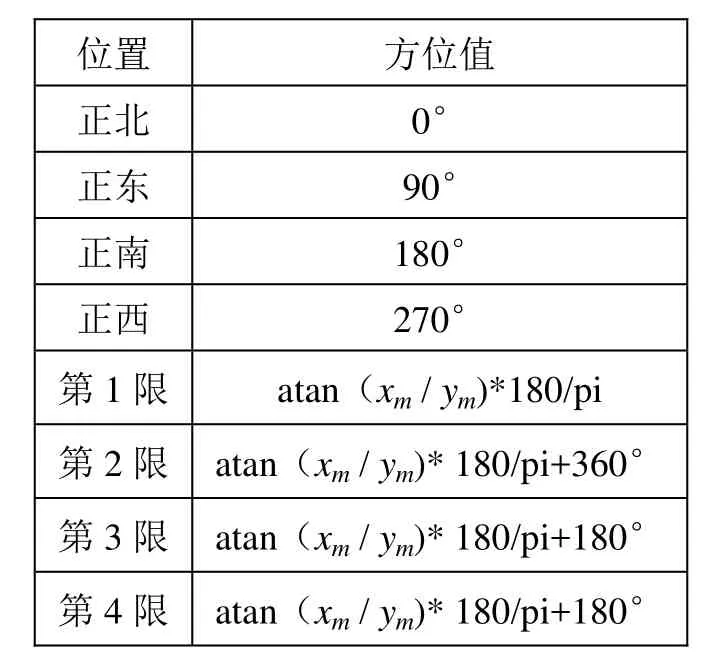
表1 位置及方位对应数值
2.4 罗盘基准方位计算
罗盘基准方位计算涉及飞机方位和飞机真航向。实际飞行中,以NDB导航台的位置为站心点,飞机在X-Y投影平面的当前位置信息可能在包括第1象限、第2象限、第3象限、第4象限、正北、正东、正南和正西,通过2.3节可得到当前的方位值。针对飞机当前航向,又区别为向台飞行和背台飞行。基于以上位置区别和背/向台飞行特殊情况,依据式(1),对罗盘基准方位角进行区别计算。
(1)向台飞行
飞机在四个象限下均可向台飞行,但罗盘指示值均为 0°。依据式(1),在不同象限下向台飞行状态下,飞机方位()α-飞机真航向()β=-180°。以第一象限向台飞行为例,罗盘基准方位角(γ)示意图见图2。
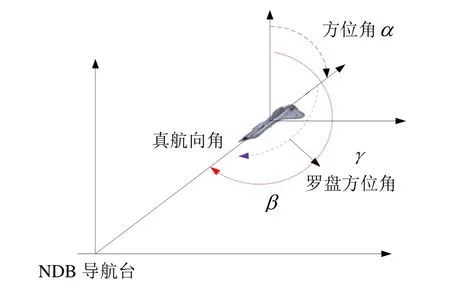
图2 向台基准方位
(2)背台飞行
飞机在四个象限下均可背台飞行, 但罗盘指示值均为 180°。依据式(1),在不同象限下向台飞行状态下,飞机方位()α-飞机真航向()β=0°。以第一象限背台飞行为例,罗盘基准方位角(γ)示意图见图3。
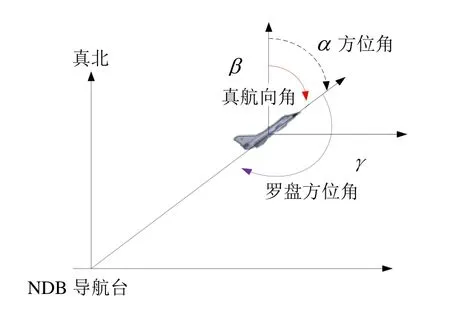
图3 背台基准方位
(3)第一象限飞行
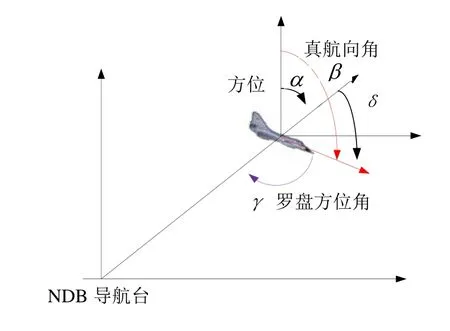
图4 第一象限基准方位
(4)第二象限飞行

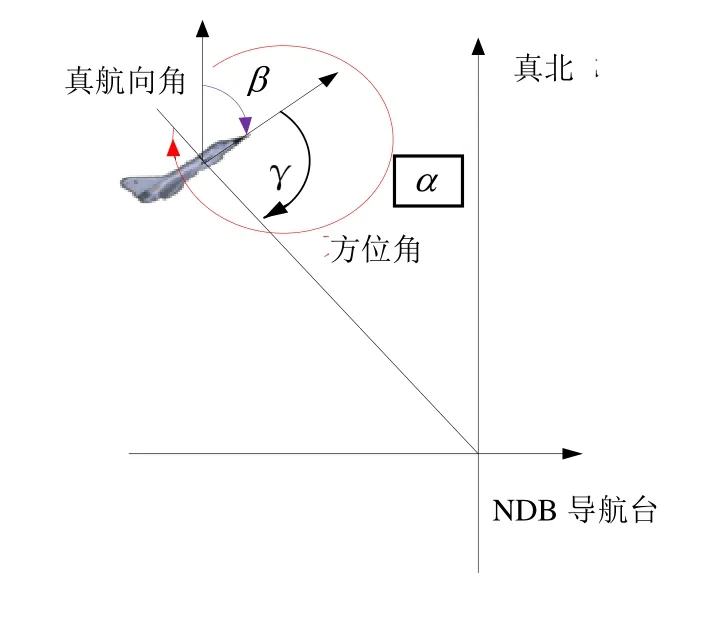
图5 第二象限基准方位
(5)第三象限飞行
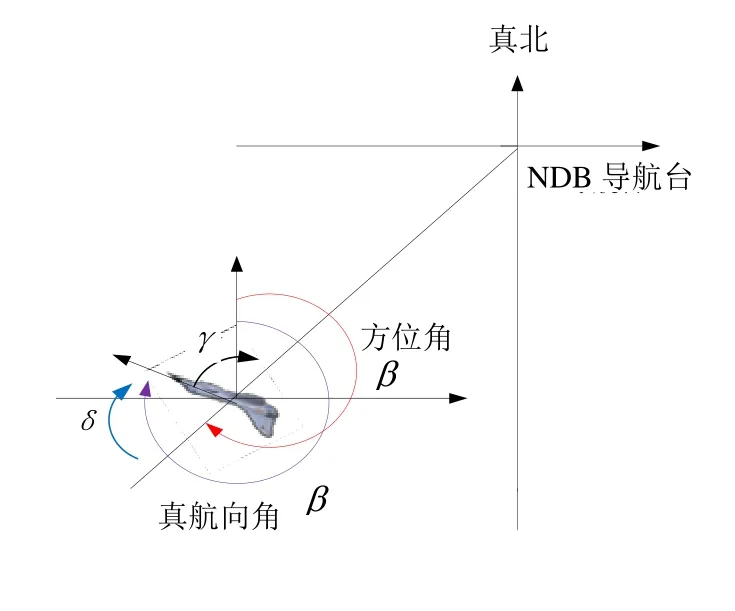
图6 第三象限基准方位
(6)第四象限飞行
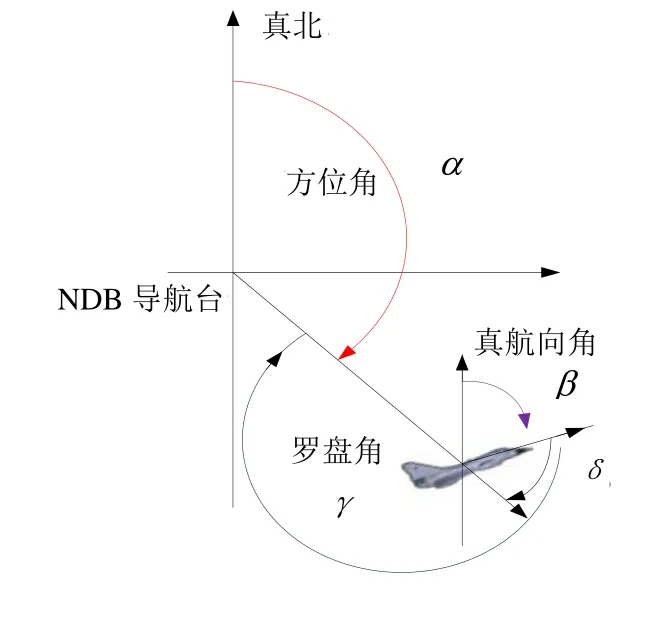
图7 第四象限基准方位
3 结束语
无线电罗盘方位基准算法,不仅适用于无线电罗盘方位的考核,同时适用于塔康、伏尔等涉及方位和距离的考核要求。通过对该算法的深刻理解,达到举一反三的目的。
参考文献:
[1]吴德伟. 无线电导航系统 [M]. 北京: 电子工业出版社,2015.
[2]朱华统. GPS坐标系统的变换 [M]. 北京: 测绘出版社,1994.
[3]周自全. 飞行试验工程 [M]. 北京: 航空工业出版社,2010.
[4]唐金元. 航空无线电通信导航[M]. 北京: 系统国防工业出版社, 2017.
[5]江学明, 白永生. 姿态型GPS在无线电罗盘试飞中的应用[J]. 全球定位系统, 2002,27(1):(28-32).
