某型跟踪雷达威力降低问题分析研究
2018-04-13邹士迁毕立财
邹士迁,毕立财
(中国人民解放军92941部队43分队,辽宁葫芦岛 125001)
0 引言
某型跟踪雷达作为武器系统火力控制雷达,能够连续自动跟踪目标、不断地对目标进行精确测量,为武器系统提供目标的实时及前置位置数据以控制武器射击[1]。在对某型空中目标跟踪过程中,该型跟踪雷达出现接受目标指示数据后,无法捕获目标,处于搜索状态,直至目标进入较近距离处,雷达才捕获目标,随后一直稳定跟踪至目标过捷径点现象。通过试验数据分析,两个航次雷达起跟距离都远小于跟踪雷达威力指标要求,直接影响武器系统使用。经问题排查,确定为中频接收机内部电缆W1故障,造成接收通道信号在传输过程中驻波变大,信号噪声基底变大,雷达一直处于搜索状态,无法转入稳定跟踪。随着目标的靠近,信噪比增大到高于雷达检波器所能检测的门限值,雷达转入跟踪状态。通过对试验中出现的问题仔细分析研究,制定出了相应的解决方案,为保障试验顺利进行,圆满完成试验任务,提供了有力的保障。
1 跟踪威力降低问题排查分析
1.1 故障树建立与排查过程
在对某类空中目标跟踪过程中,该型跟踪雷达出现接受目标指示数据后,无法捕获目标,处于搜索状态,直至目标进入较近距离处,跟踪雷达才捕获目标稳定跟踪至目标过捷径点现象。雷达捕获目标时,对目标回波信号进行放大,滤波等处理,当提取到目标信噪比超过门限值,雷达转入跟踪。试验过程中,雷达一直处于搜索,未截获目标,直到目标进入近距离后,才转跟踪,两个航次现象一致,说明设备在试验过程中,在目标处于远距离时,雷达搜索板收到的信号未达到捕获门限。
通过以上分析列出跟踪雷达威力降低的故障树,如图1所示。
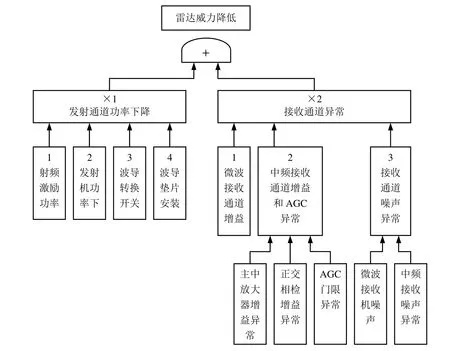
图1 雷达威力降低故障树
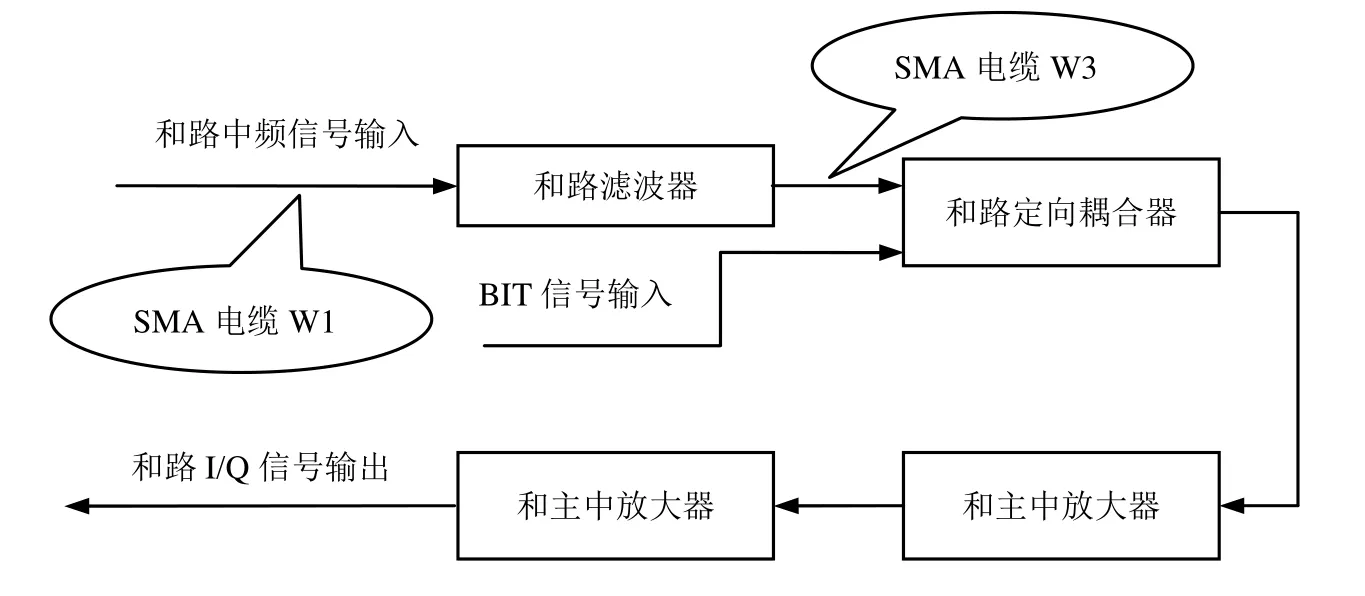
图2 中频接收机内部和通道信号流程图
根据图 1故障树,现场对设备进行逐一排查。经现场测试检查,排除了X1事件,排除了X2中的 1、2事件。控制雷达进入检查状态,用频谱仪分别测量中频接收机和、方位、俯仰主中放大器输出端频谱,发现方位、俯仰主中输出端输出信号频谱正常,而和主中放大器输出端输出噪声基底抬起,进一步用示波器测试相检的6路信号输出,发现和路I/Q有一峰-峰值为2V左右的噪声信号,而方位、俯仰4路I/Q信号峰-峰值均小于0.2V,和路I/Q存在噪声属于不正常现象。由此判定中频接收机和通道存在噪声,不能排除“中频接收机噪声异常”事件。
下面对中频接收机和通道噪声进行具体分析:中频接收机和路中频信号输入是由 SMA电缆 W1从中频接收机组合后面板连接到和路滤波器,然后经SMA电缆W3连接到和路定向耦合器的,然后再经过SMA电缆传输给和主中放大器及正交相干检波器。中频接收机内部和通道信号流程如图2所示。
结合中频接收机内部和通道信号流程,针对中频接收机存在噪声信号,列出故障树如图3所示。
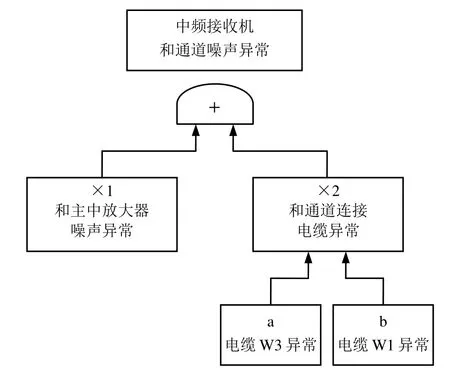
图3 中频接收机和通道噪声故障树
根据图3故障树进行排查:
X1:和主中放大器噪声异常
雷达正常开机状态下,将中频接收机置“本机”、“BIT”状态,用频谱仪测量和主中放大器输出,信号频谱正常。排除该事件。
X2:和通道连接电缆异常
(a)电缆W3异常
用雷达操控台控制雷达进入检查状态。用频谱仪测量中频接收机和主中放大器输出端。发现和主中放大器输出端输出噪声基底抬起,将方位路滤波器输入端的电缆更换至和路滤波器后,发现频谱正常。说明电缆W3正常,排除该事件。
(b)电缆W1异常
断开电缆W1与滤波器输入端的连接,用频谱仪测试该电缆的输出端的信号,发现上述a)项测试时发现的噪声基底抬起的现象依然存在。仔细检查电缆W1,发现电缆W1一端的接头处屏蔽层断开,另一端完好,更换新电缆,再次用频谱仪测试该电缆的输出端信号,频谱正常,说明电缆 W1异常。由此可判定,接收机噪声信号是由电缆W1异常带来的。因此跟踪雷达威力降低定位为:中频接收机内部电缆W1故障,造成接收通道异常。
1.2 故障SMA电缆W1导致雷达威力下降机理分析
该故障SMA电缆W1在接收机内部,是和主中放大器模块的输入信号,其作用是将微波接收机送下来的和路信号通过同轴电缆传输给中频接收机和路滤波器,再送给和主中放大器,如图2所示。该电缆屏蔽层断开后,使得电缆接地不良,造成信号在传输过程中驻波变大,信号噪声基底变大,当目标处于远距离时,目标回波信号淹没在噪声里,雷达搜索板收到的信号未到达捕获门限,即实际信噪比未达到最小可检测信噪比要求,雷达一直处于搜索状态,无法转入稳定跟踪。随着目标的靠近,目标回波信号越来越强,使得目标的信噪比增大高于雷达检波器所能检测的门限值,雷达转入跟踪状态。
2 跟踪雷达方程及最小可检测信噪比对威力影响分析
2.1 跟踪雷达方程
典型跟踪雷达发射笔型波束,以接收单个目标的回波,并跟踪目标的方位角、俯仰角、距离和多普勒速度[2]。跟踪雷达方程是用来预测或估算跟踪雷达作用距离的一个数学方程,方程中包含雷达系统、环境和目标的各种参数。跟踪雷达的作用距离计算主要依据保持回路跟踪或保证跟踪精度所需要的最小信噪比。
由文献3可知,在自由空间条件下,单站跟踪雷达作用距离方程为
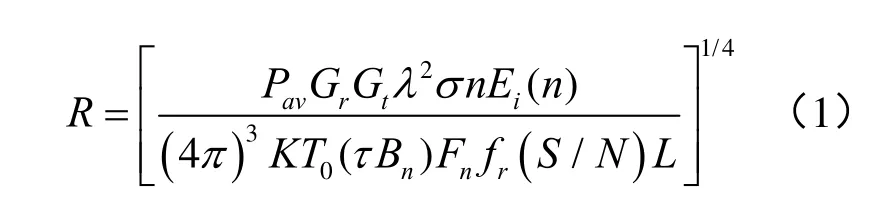
式中,Pav为发射平均功率;Gt为天线发射增益;Gr为天线接收增益;λ为雷达工作波长;σ为目标的雷达截面积;K为波兹曼常数 1.38×10-23J/K;T为绝对温度:293K;Fn为接收机端口噪声系数;Bn为接收机带宽;fr为脉冲重复频率;L为总损耗,R为目标与雷达间的距离。(S/N)为最小可检测信噪比,它与该雷达的发现概率Pd和虚警概率Pfa有关。
2.2 最小可检测信噪比与跟踪威力之间关系
某型跟踪雷达目标搜索转跟踪过程为:雷达接收火控台给出目标的方位、距离、径向速度和波束标志信息。方位上从当前点快速调舷到位,测距机按目标距离为中心值设置距离搜索波门,信号处理机以径向速度为中心值设置速度搜索波门,发射机按规定的频率发射功率,天线按倒8字圆形进行扫描,当雷达收到目标回波时,信号处理机对目标回波进行处理,当连续七个回波中有四个以上回波信噪比超过门限值时,雷达判为目标。中心控制计算机发出跟踪指令,中频接收机、信号处理机、测距机转入跟踪状态,伺服分机控制波束停止扫描,闭合误差通道转入跟踪状态。
某型跟踪雷达接收到回波信号后,对信号进行处理,当中频接收机输出的信噪比达到门限才能被检波识别。微弱的目标信号才能从大量的噪声中分离出来,如果回波中包含的噪声过大,使得信噪比低于雷达检波器所能检测的门限值,则目标信息就会被噪声淹没,从而分离不出目标,门限是由最小可检测信噪比决定的[4]。
根据式(1)跟踪雷达方程,代入该型雷达发射平均功率、天线增益、工作波长、目标雷达截面积、噪声系数等各项参数后,得到最小可检测信噪比与最大跟踪距离之间的关系为
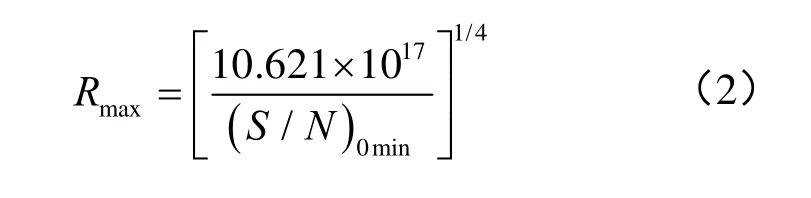
最小可检测信噪比与最大跟踪距离之间的关系示意图如图3所示。
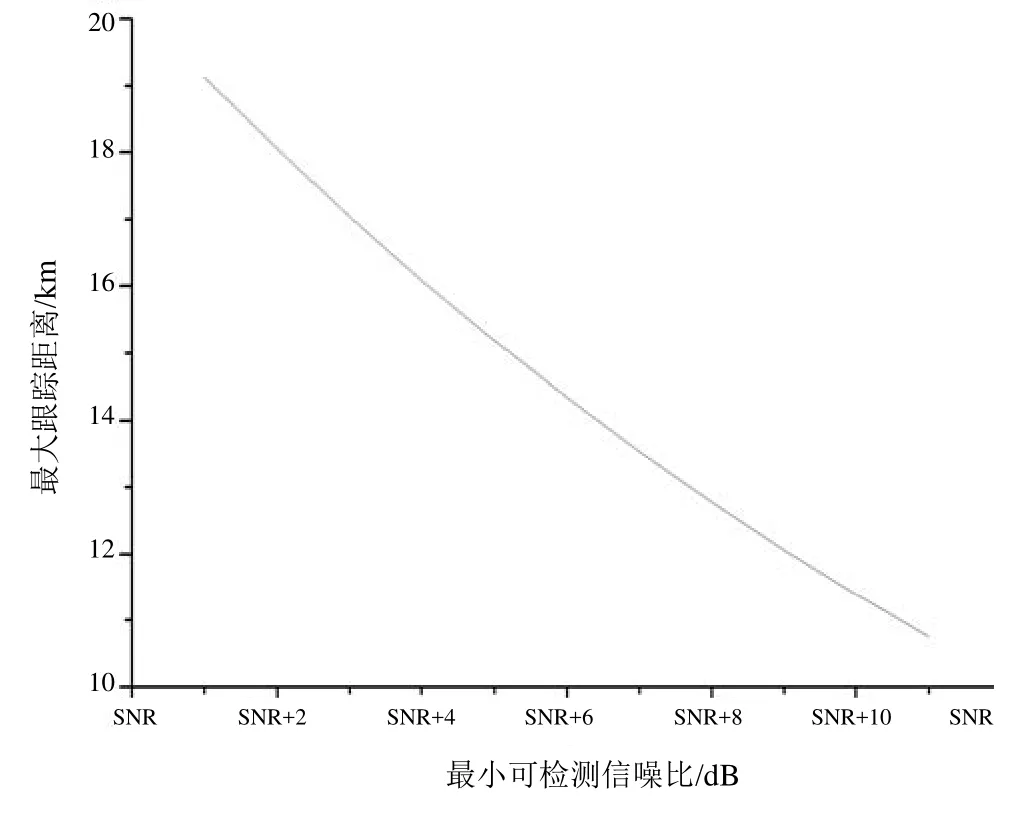
图3 最小可检测信噪比与最大跟踪距离关系示意图
根据图3可知,雷达所需最小可检测信噪比越小,雷达识别微弱信号的能力越强,目标的最大跟踪距离越大。已知该型跟踪雷达最小可检测信噪比为(SNR0)dB,该雷达在工作过程中,因为接收机噪声增大,导致信噪比低于(SNR0)dB,雷达不能识别目标信号,导致威力下降甚至无法跟踪目标。
3 解决方案
调试与检查,是保证雷达正常工作的前提和基础。结合解决问题的全过程,分析归纳此类问题的解决方案如下:
(1)电缆在外场返修要制定外场返修工艺流程,严格按照返修工艺流程执行。
(2)在设备的调试过程中,对电缆的操作要严格按照操作规范执行。
(3)更换故障电缆。更换后,雷达最大跟踪距离满足威力满足指标要求。
4 结束语
针对试验过程中发生的跟踪雷达威力下降问题,建立了故障树并进行了排查分析。结果表明导致跟踪雷达威力下降的因素十分复杂,只有通过认真细致的排查分析,才能尽快找到问题的原因。验证了跟踪雷达方程中,最小可检测信噪比与跟踪威力之间的关系结论。结合待测雷达实际参数,给出了该雷达最小可检测信噪比与跟踪威力之间关系曲线和解决故障电缆的实际方案。本文中提到的由于中频信号电缆导致跟踪雷达威力下降问题,属装备非正常状态下才会发生的问题,如果在此情况下该问题没有及时得到解决,其结果必然会浪费试验航次,影响试验的进度。
参考文献:
[1]王德纯. 精密跟踪测量雷达技术[M]. 北京:电子工业出版社, 2006.
[2][美]Merrill I.Skolnik. 雷达手册(第三版)[M]. 北京:电子工业出版社, 2010.
[3]丁鹭飞,耿富录. 雷达原理(第三版)[M].西安:西安电子科技大学出版社, 2002.
[4]陈伯孝. 现代雷达系统分析与设计[M]. 西安:西安电子科技大学出版社, 2012.
