基于实时优化的搜索雷达点迹提取方法
2018-04-13周昆正
周昆正
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
在雷达数据处理中,点迹数据预处理是航迹数据处理的前提,关系到一部雷达最终的点迹精度、航迹的滤波质量和精度。雷达目标回波信号经信号处理以后形成原始点迹数据,一个目标可能在不同方位、不同距离同时输出点迹数据,因此需要通过点迹凝聚将扫描获得的单目标的多个数据凝聚成一个点迹[1][3]。传统的自动点迹提取处理方法一般分两步:一是剔除原始点迹中的野值;二是对同一组的点迹进行距离、方位上的凝聚处理,求出目标的物理位置估计值。
一般的原始点迹数据量较大,点迹数据处理系统具有一定的实时性。因此,早期的数据处理系统的实现采用DSP,近年来也有采用FPGA实现[3],这些实现方式由于存储量的限制对数据处理系统能力的发挥都有一定的制约。近年来,随着通用CPU(X86、PowerPc、ARM、龙芯等)处理能力的提升、高速并行计算、多核多线程技术的发展,利用通用CPU实现点迹凝聚已成为可能。
本文针对某型舰载警戒监视雷达的实际需求,通过PCI总线,采用高速主动DMA传输方式,完成原始点迹数据的实时传输,采用通用 CPU实时完成点迹凝聚。本文设计的雷达点迹数据处理系统,经过实际运行,达到了良好的数据处理效果。
1 点迹凝聚算法
1.1 一维方位中心估计
点迹凝聚的方法较多,但大体可分为先距离后方位的聚类方法,以及基于图像处理的点迹凝聚方法[5][6]。图像法的计算量大、且延迟多,在实际工程中应用较少。传统的点迹凝聚方法是质心法。其思路是,先对信号处理后获得的点迹信息进行聚类,再求其质心。
其中,iP为幅度值,xi为方位码,ˆx为方位中心估值。
实际实现中,其核心和难点是凝聚点迹块的获取,即哪些视频点可凝聚为一个点迹块。因为雷达扫描回波是每雷达周期一组回波,故通常采用先距离维后方位维的“聚类”方法。因在距离和方位维分别依次独立进行聚类,这样就容易造成方位维目标丢失或分裂。
1.2 二维质量中心估计
在一维方位中心估计的基础上进一步可以实现二维质量中心估计,以实现对于目标方位中心和距离中心的精确估计。与面积中心法相比,质量中心法充分利用了目标回波的幅值信息,具有较高的估计精度。二维质量中心法的计算公式可以由式(1)衍生得到。对于属于同一个目标的回波信号,有
其中,Pi,j为幅度值,xi,j为方位码或距离吗,ˆx为方位或距离中心估值。
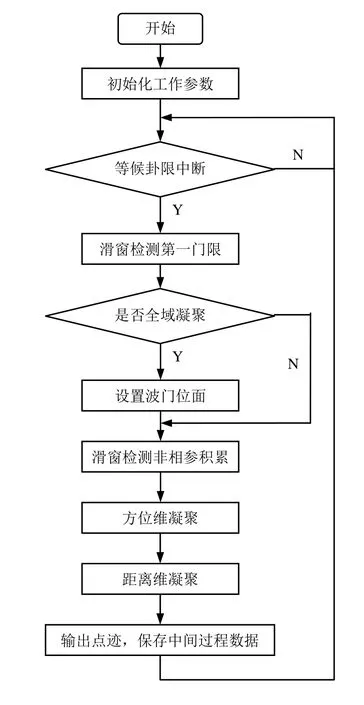
图1 点迹凝聚框图
在文献7中,首先在各距离单元内分别计算方位中心,以确定哪些距离单元的信号是由同一目标产生的。而后,对所有应融合到一起的目标回波数据重新进行计算得到方位中心估值和距离中心估值。
笔者认为,此种分步骤分别计算,以及后续的简化的二维质量中心法:方位质量中心, 距离峰值搜索,在距离量化精度较高时,有可能会损失质量中心的计算精度。因此,本文对所有应融合到一起的目标回波数据采用连通性判断后累加计算,最终计算出方位中心估值和距离中心估值。
本雷达是舰载两坐标机械扫描天线空海兼顾型警戒监视雷达,根据本雷达的特点,首先在方位维进行过门限检测和滑窗检测,再根据不同工作方式下的目标方位维持续单元数,目标在距离维持续单元数,剔除野值,同时完成凝聚。本方法与常规方法不同之处在于先进行目标检测,方位维凝聚,再进行距离维凝聚。目标检测要在方位—距离的二维区域进行,同时剔除了过大的地物和过小的噪声干扰,抑制目标分裂或丢失,降低虚警率。
2 点迹凝聚的软件实现
2.1 雷达系统功能要求
在本项目中,天线为机械旋转,转速有三种,雷达工作周期有三种,方位量化 14位。因此,雷达点迹处理系统共有九种工作方式。
信号处理输出的数字回波数据,经过PCI总线,采用主动DMA方式传送到数据处理CPU的内存区域。即在每个雷达工作周期的起始,由信号处理FPGA电路,编程PCI9054控制芯片的DMA控制寄存器组,主动发起DMA传输,数据由FPGA缓存传输到数据处理CPU的内存区域,不影响CPU正在进行的其他操作。
按照数据处理的要求,数据处理 CPU每天线周期32卦限工作,每卦限11.25度区域,定时工作,处理信号处理送来的数字回波。点迹凝聚处理在每卦限中断时处理,输出的点迹送 TWS处理建立航迹,最后通过以太网输出点迹、航迹数据到终端显示。
本系统运行 VxWorks 嵌入式实时操作系统,为了确保雷达数据处理的实时性,在软件设计中采用了多任务设计方法。主要有网络传送任务、网络接收任务、卦限中断处理、点迹数据处理、TWS航迹处理任务。
2.2 目标检测
对于机械扫描天线雷达,目标驻留时间较长,又有噪声及海杂波影响或目标本身的起伏,当天线进行连续扫描时,波束扫过目标期间时将获得一串回波脉冲,其幅度值不等幅度,且目标开始出现的角度位置不能预知,故采用该滑窗检测器进行点迹的提取,不仅可以判决目标的存在与否, 还可以判定目标的方位。
当天线进行连续扫描时,波束扫过目标期间时将获得一串回波脉冲。根据雷达半功率点波瓣宽度,雷达天线转速及重复频率,计算出波瓣内常规点目标回波个数,由此来确定目标检测时的准则。
其中,θ0.5为半功率点波瓣宽度,Ωd为天线转速(°/s),fr为脉冲重复频率(Hz)。针对超大目标在距离较近时,不能按照点目标计算,其回波个数应适量修正。
目标检测主要是获取目标点迹块区域,判定是否目标。根据本雷达特点,不同工作方式下目标持续的距离和方位单元数大不相同,可以据此对回波数据进行筛选,目标在方位维会占据多个单元,也可能跨距离单元。
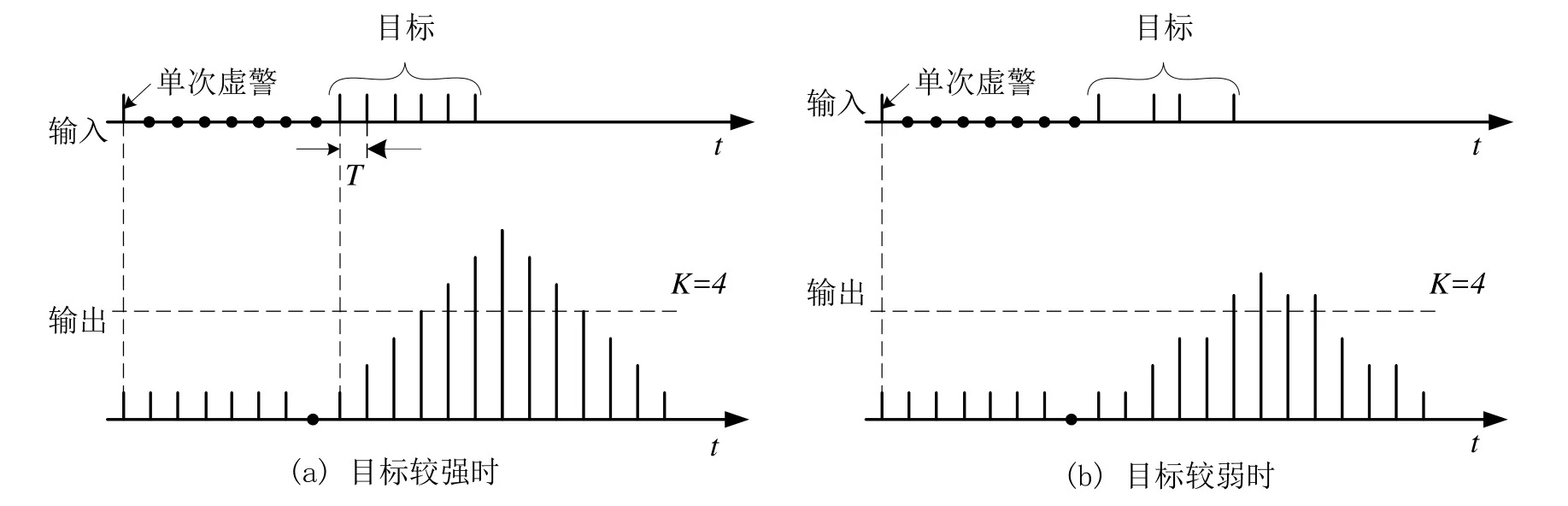
图2 滑窗检测器判决原理
常规的滑窗检测器由多节延迟线检测门限电路组成[1][8],工程中常用性能比较好的小滑窗检测[1][2]。本文中,针对输入的数字视频回波,采用软件判决回波是否超过第一检测门限,输出“0”、“1”的二值信号,二进制滑窗积累采用软件对二值信号累加后进行判决。
由于雷达工作状态有全域检测和检测波门内检测两种方式,据此生成与数字视频距离、方位单元匹配的波门位面,允许该单元数字视频参与点迹凝聚,设置为“1”,否则为“0”。经过第一门限后的二值信号与波门位面进行 “逻辑与”操作,输出的二值信号进入下一步骤的二进制滑窗积累。
2.3 滑窗积累及方位维凝聚
目标凝聚过程中使用的参数包括凝聚标识,目标方位维的起始、结束、距离单元数,目标凝聚块的方位起始、结束,距离起始、结束,幅度与距离乘积的累加和,幅度与方位乘积的累加和,幅度的累加和,凝聚块的目标点的计数。
方位维凝聚在滑窗检测之后进行。滑窗检测时,目标回波个数大于4/7门限时,滑窗检测结果为“1”,否则为“0”。对滑窗检测结果进行累加,计算目标过门限的回波个数。当判断是一个目标的起始时,计算方位凝聚的参数初值,例如幅度与方位乘积的累加和,幅度的累加和。当目标已经起始,当前滑窗检测结果为“1”时,则累加当前方位的凝聚参数,例如幅度与方位乘积的累加和,幅度的累加和。此时,如果当前方位单元经过正北,则给当前方位加上360度后再计算凝聚参数。如果目标在方位维结束,目标回波个数大于最小方位宽度门限,则计算所有凝聚参数,设置凝聚标识为“有效”,存入缓冲区。否则删除所有凝聚参数,剔除当前凝聚点。如果目标在卦限边界没有结束,则保留凝聚参数到下一个卦限继续处理。
方位维凝聚时,在每一个距离单元,从每一个卦限回波的方位起始到方位结束,一个距离单元做完再进行下一个距离单元,顺序进行。在方位维凝聚时,根据目标的特点,在雷达不同的工作方式下,计算点目标的回波个数,作为最小方位宽度门限,可以有效剔除噪声、干扰等虚假目标。滑窗检测可以抑制方位分裂。在雷达的方位分辨力范围内的点迹可以凝聚为一个目标,也可以抑制方位分裂。
2.4 距离维凝聚
点迹凝聚输出参数有时戳、质心的距离、方位,目标距离和方位上的宽度,点迹的平均幅度,目标的原始回波点计数。
方位维凝聚后,再进行方位凝聚块的跨距离单元凝聚。距离维凝聚过程,在每一个距离单元,从每一个卦限回波的方位起始到方位结束,一个距离单元做完再进行下一个距离单元,顺序进行。即对于第i距离单元对应的凝聚块,分别与第i-1和i+1距离单元的方位凝聚块进行连通判定,依据雷达的距离分辨力,还可以对第i-2和i+2距离单元处理。若连通,则合并凝聚块,凝聚参数合并。
在程序实现连通判定时,这部分功能可以采用函数的迭代调用完成。连通判定程序每迭代一次,迭代深度递增。如果超过最大迭代深度,则返回,设置返回值为距离深度超长。如果方位凝聚跨越卦限边界,则再设置返回值为两种情况兼有。
凝聚标识类型有六种:“0”数据无效;“1”数据有效;“2”占用,正在进行凝聚搜索;“3”已搜索过,目标跨边界,留给下一卦限处理;“5”深度过长,剔除;“7”目标跨边界,深度过长,留给下一卦限,搜索所有连通区域,剔除。
距离维凝聚过程中,仅迭代搜索是正常返回时才进行参数合并。连通判定时,需注意方位凝聚块跨越正北的情况。凝聚程序结束时,如果为方位凝聚跨越卦限边界,恢复凝聚块凝聚标识为“有效”,留待下一卦限再处理。
在雷达的距离分辨力范围内的点迹可以凝聚为一个目标,可以抑制距离分裂。根据典型目标,如飞机、作战舰艇的实际大小估值,计算目标在不同距离上的最大方位宽度门限和距离宽度门限,可以有效剔除地物等面目标。
2.5 软件设计优化
(1)存储空间需求优化
本项目在软件设计时,方位按照20000单元设计、距离按照 6400单元设计。点迹凝聚时,如果一帧雷达回波的视频数据和凝聚中间过程数据都存储,那么需要存储空间约300MB。当修改为按照卦限定时处理后,仅存储本卦限的雷达回波,需要存储空间约40MB。运行耗时稍有增加,原因是卦限处理时,需要保存卦限边界的中间处理数据。
采用通用 CPU实现点迹凝聚,存储空间的需求约束不大。软件设计可以采用流水处理方式,大量记录中间处理过程数据,减少 CPU的逻辑判断耗时,提高软件运行效率。
(2)程序代码优化
现代通用 CPU都具有二级、甚至三级指令缓存、数据缓存,其工作流水线比较长,因此适合于大数据量的流水操作。例如,最新架构的ARM CPU在多媒体指令优化时,FFT算法的计算效率已经接近 TI公司的主流 DSP芯片。当指令中大量存在if/else等逻辑判断、跳转指令,会破坏CPU的工作流水线,运行效率会大幅度降低[9][10]。
滑窗检测第一门限检测时,当采用if/else指令实现,在测试计算机上实现一帧雷达回波计算需要耗时66ms。当采用逻辑判断的结果(逻辑“1”或逻辑“0”)直接赋值给变量时,同样的计算量耗时仅为13 ms。
滑窗检测,当采用if/else指令实现,在测试计算机上实现一帧雷达回波计算需要耗时215ms。当采用逻辑判断的结果(逻辑“1”或逻辑“0”)直接参与滑窗检测累加计算时,同样的计算量耗时仅为33 ms。
方位维、距离维凝聚时,大量存在逻辑判断,代码优化效果很小。
(3)波门位面
在本项目中,点迹凝聚工作在全域、区域两种方式下。区域工作方式时,仅输出波门警戒区内的点迹。如果仍然进行全域凝聚,输出的点迹再与波门警戒区作符合性判断,当波门警戒区数百个,每卦限点迹数千个时,计算耗时是巨大的。
为此,把每个波门警戒区与卦限角度区域做重合性判断,设置波门掩膜位面,作为雷达回波数据的掩膜位面。雷达回波数据与掩膜位面复合后,再进行过门限检测和滑窗检测,运行耗时仅略微增加。
3 实现效果
本项目测试时采用的通用计算机为Core2 Duo E7500 2.93GHz,编程环境为Visual Studio2008,视频数据随机产生。当天线扫描周期6s,一帧雷达波束6700多,距离单元3200个,过门限点数为全部一帧回波的17%时,凝聚耗时461ms,约占天线扫描周期的不到10%。
本项目中,信号处理每雷达周期的数字回波,通过PCI总线主动DMA方式传输,16kB数据约需要130μs,传输效率非常高。采用的通用CPU为Core2 Duo L2400 1.66GHz,编程环境为VxWorks6.8,程序移植后运行。在实际雷达工作情况下,雷达工作参数与上述相同,针对实际雷达回波,门限适宜选择,凝聚耗时最大每卦限约20ms。完全达到了点迹数据处理的实时性要求。
4 结束语
本文对一个实际舰载搜索雷达点迹凝聚处理软件的设计思路、方法、软件优化设计进行了阐述。采用通用 CPU进行目标检测和点迹凝聚处理,充分发挥了通用 CPU开发简便、内存大、软件可针对MMX、SSE、SSE2等多媒体指令集优化的优点,可以完成以前DSP、FPGA才能完成的处理任务,可以完成更复杂的数据处理算法。随着信息技术的发展,雷达数据处理与信号处理进一步融合的趋势愈发明显,通用 CPU必将在雷达系统中更加广泛应用。
参考文献:
[1]张明友, 汪学刚. 雷达系统(第2版)[M]. 北京:电子工业出版社, 2006.
[2]Merrill L SKolnik. 雷达手册(第2版)[M]. 北京:电子工业出版社, 2004.
[3]吴顺君, 梅晓春. 雷达信号处理和数据处理技术[M].北京:电子工业出版社, 2008.
[4]杨海英, 蔡文彬, 秦赟等. 点迹凝聚在FPGA 上的实现[J]. 雷达与对抗, 2012, 32(3).
[5]杨文琳, 方志宏, 阮信畅等. 雷达点迹凝聚处理技术及其数据分析[J]. 信号处理, 2001, 17(2).
[6]李洁. 雷达原始回波数据的模拟和处理 [D]. 西安电子科技大学, 2014.
[7]蔡晨曦, 王祖斌, 王秀坛等. 远程警戒雷达自动点迹提取算法[J]. 清华大学学报(自然科学版), 2002, 42 (7).
[8]于振华. 雷达点迹检测器的设计原理和实现[J]. 舰船电子对抗, 2007, 30(5).
[9]张红祥. C+ +代码优化技巧[J]. 长春师范学院学报(自然科学版), 2005, 24(5).
[10]范建军. SSE2指令在代码优化中的关键作用研究[J].华中师范大学学报( 自然科学版), 2004, 38(4).
